1.1 机械臂(6-DOF)组装教程
Episode为恩培个人工作室研发的机械臂,本文档配套对应视频已经备份存档;恩培助手微信:ffcv1024。
1. 准备工作
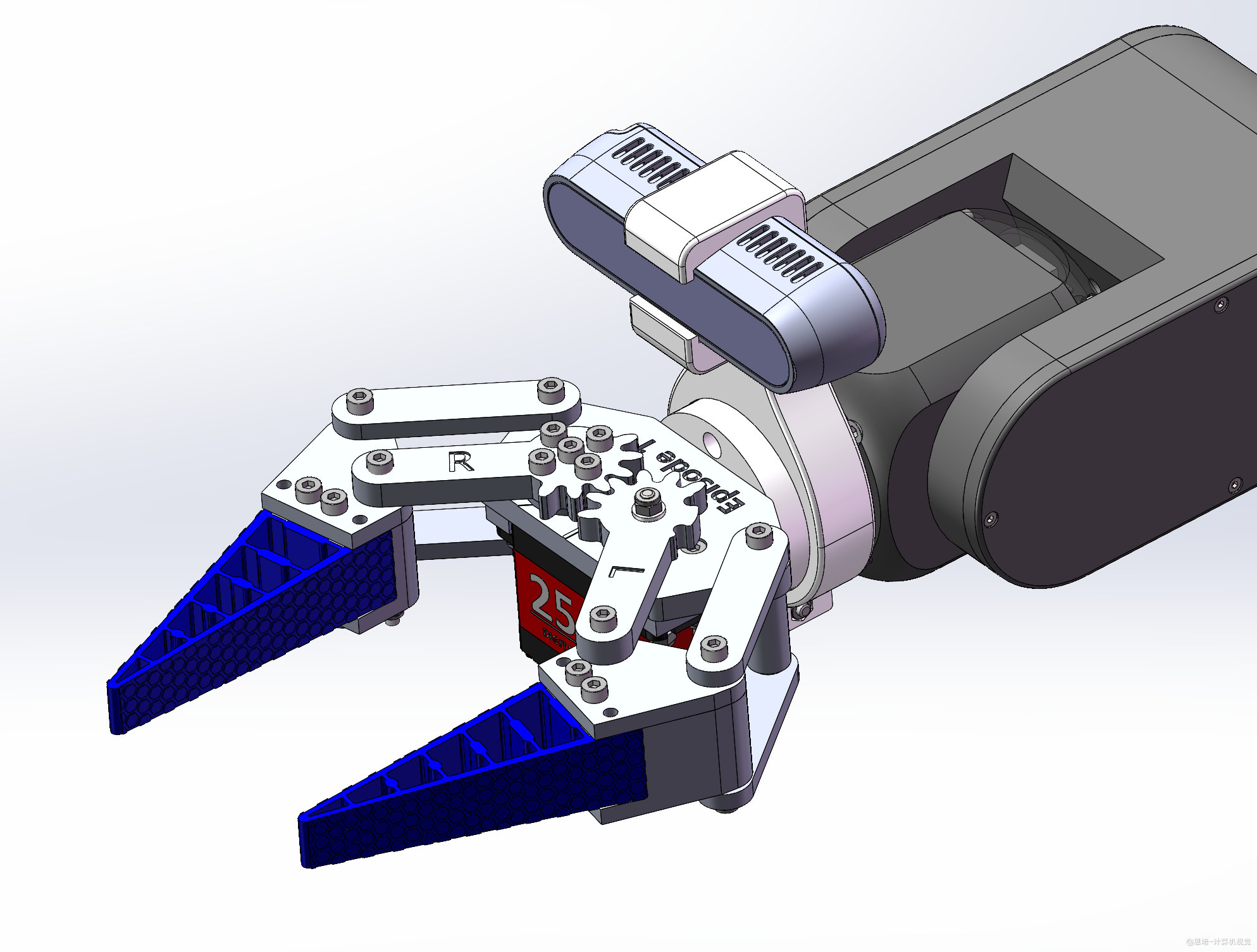
感谢大家选择 Episode 1 机械臂(6-DOF),本节课将帮助大家把收到的套件组装成成品,下面是装配完成的效果图:
安装过程中手部保持清洁,干燥(尽量戴手套),否则可能引起器件短路、工作异常(如烧坏电路板)。
对于塑料零件,如果用电动螺丝刀请调低扭矩,手动扭的时候也不要太暴力,能紧固即可。
| 散件 | 成品 |
|---|---|
 |
 |
操作步骤:
-
拆箱
-
准备必备工具:
名称 图示 推荐链接 作用 常规十字螺丝刀 
/ 拆卸电机自带的十字螺钉 常规一字螺丝刀 
/ 去除电机自带的键,建议使用直径 6mm 硬度较高的螺丝刀 2mm 一字螺丝刀 
推荐链接 拧 2P 插头微型螺丝,建议直径 2mm 内六角扳手套件 
推荐链接 安装各种内六角螺钉,注意,需要加长版 尖嘴钳 
推荐链接 辅助安装螺母 普通钳 
推荐链接 安装电机轴键 剥线器 
推荐链接 电子线接线用 打火机 / / 热缩管收缩用 卷尺 / / 量线用 光学平板 
推荐链接 固定机械臂底座,否则会倾倒,推荐 300x300x13 尺寸 厚木板 / / 如果觉得光学平板较贵,可以用木板替代,厚度要 10mm 以上 手套 防止触摸电路板,否则会烧毁 润滑油 
推荐链接 润滑键槽等零件 -
推荐配备工具:
名称 图示 推荐链接 作用 游标卡尺,如没有可用普通直尺 
推荐链接 辅助定位安装,如联轴器和光轴 可换批头、可调扭矩的电动螺丝刀 
推荐链接 加速螺钉安装,但需要注意调节扭矩,不能太大,否则可能压坏塑料零件 加长内六角扳手批头 
推荐链接 配合电动螺丝刀,加速螺钉安装 自动剥线器 
推荐链接 快速剥线
2. 装箱单(零件介绍)
2.1 机械臂本体装箱单
- 套餐二装箱一共 80 种零件(零件编号不连续)
- 如果漏发、多发、发错、损坏请联系小助手(微信:ffcv1024 或 bbxz1024)
| 零件编号 | 图示 | 名称 | 类型 | 1 成品实际数量 | 作用 |
|---|---|---|---|---|---|
| 10003 |  |
小轴承支撑 | 3D 打印 | 1 | 支撑两个轴承 |
| 10009 |  |
J2 腰关节 | 3D 打印 | 1 | 腰关节 |
| 10010 | 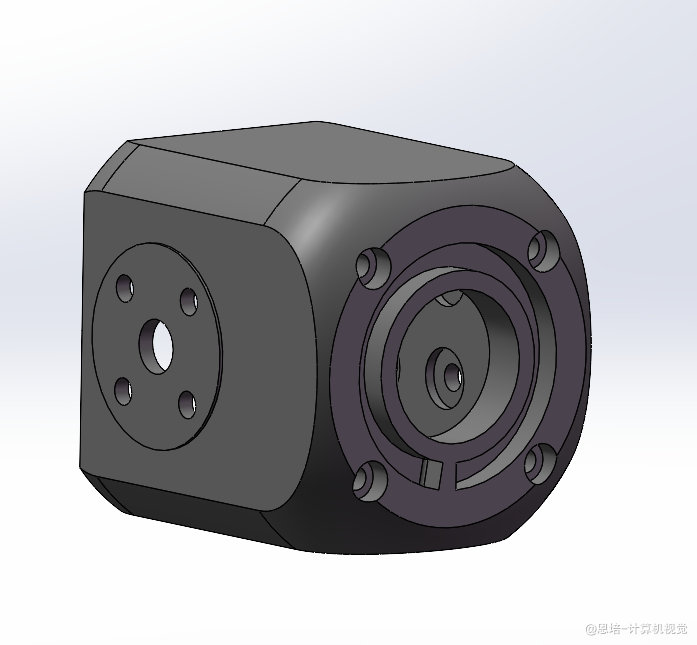 |
J6 腕部 | 3D 打印 | 1 | 腕部 |
| 10017 | 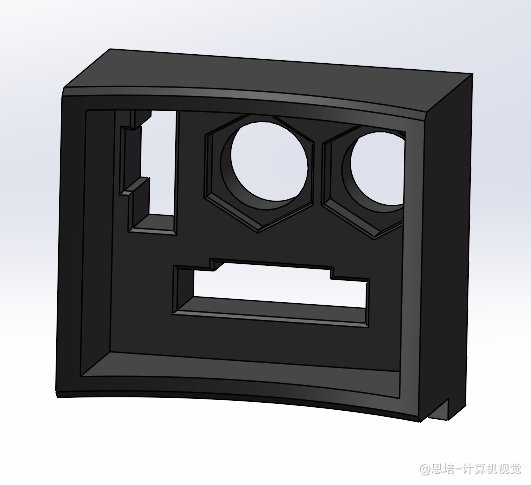 |
J1 底座闸门 | 3D 打印 | 1 | 底座闸门,用于固定各种插座 |
| 10019 |  |
J5 盖子皮带面 | 3D 打印 | 1 | 盖子 |
| 10020 | 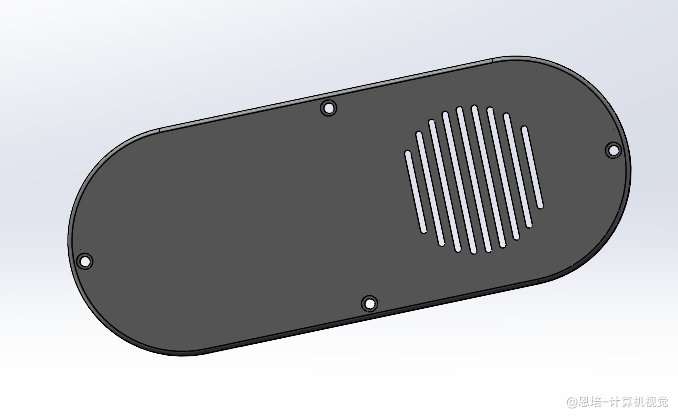 |
J5 盖子接线面 | 3D 打印 | 1 | 盖子 |
| 10021 | 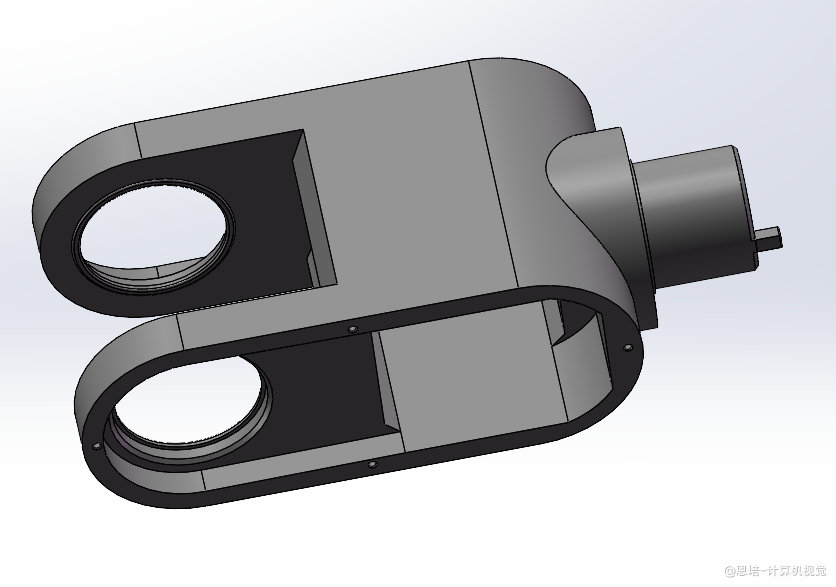 |
J5 小臂旋转 | 3D 打印 | 1 | 小臂旋转 |
| 10024 |  |
J4 盖子 | 3D 打印 | 1 | 小臂固定盖子 |
| 10025 | 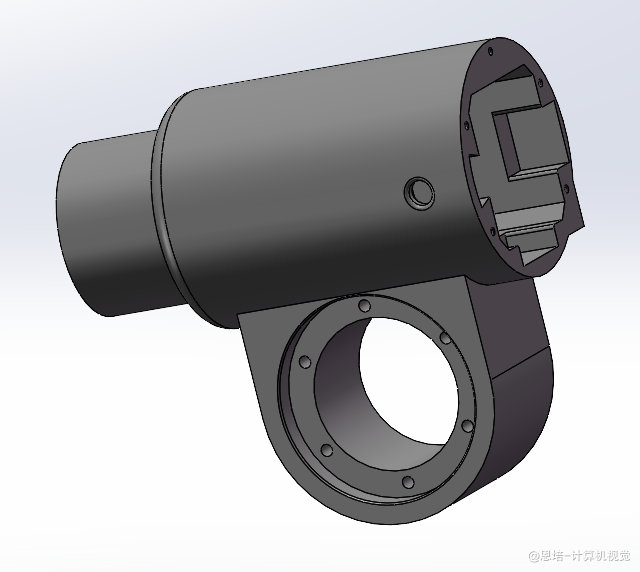 |
J4 小臂固定 | 3D 打印 | 1 | 小臂固定 |
| 10028 |  |
J3 大臂 | 3D 打印 | 1 | 大臂 |
| 10031 | 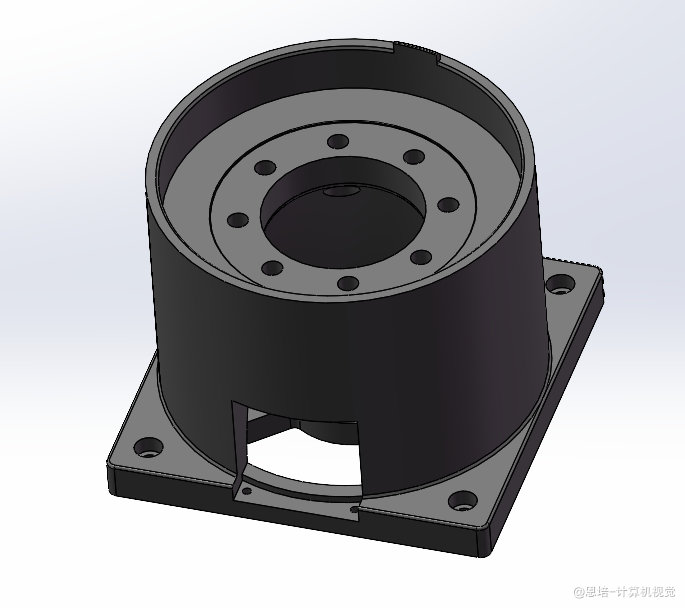 |
J1 固定底座 | 3D 打印 | 1 | 固定底座 |
| 10033 | 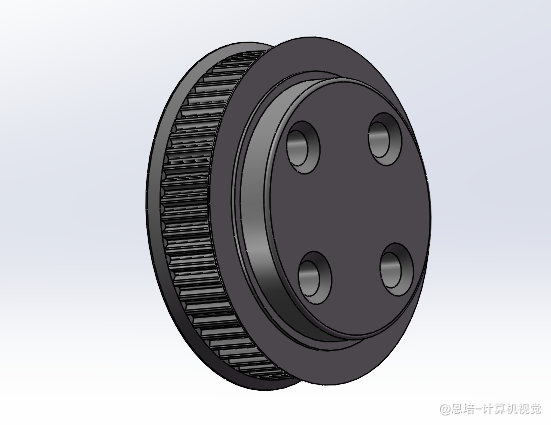 |
J5 60 齿同步轮 | 3D 打印 | 1 | 同步带轮 |
| 10043 | 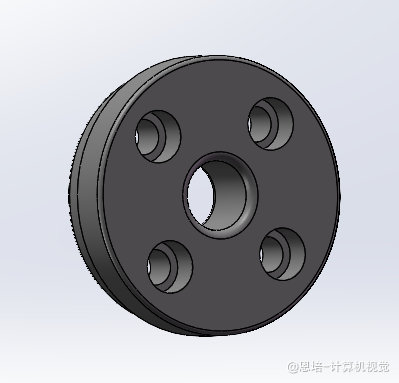 |
J5 轴承盖子 | 3D 打印 | 1 | 轴承盖子 |
| 10044 | 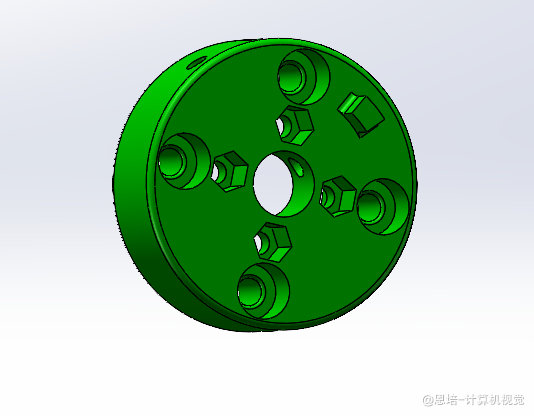 |
J6 端侧安装面 | 3D 打印 | 1 | 机械臂末端,用来安装各种工具、执行器 |
| 10045 | 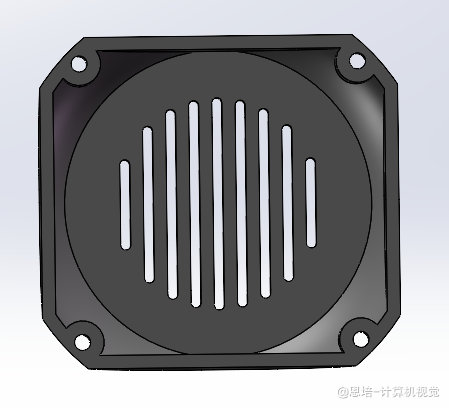 |
J6 盖子 | 3D 打印 | 1 | 腕部盖子 |
| 10046 | 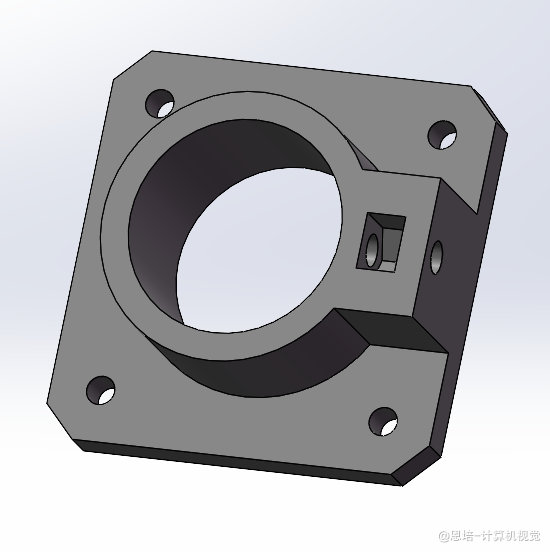 |
J5 电机拉紧板 | 3D 打印 | 1 | 用来拉紧同步带 |
| 10002 | 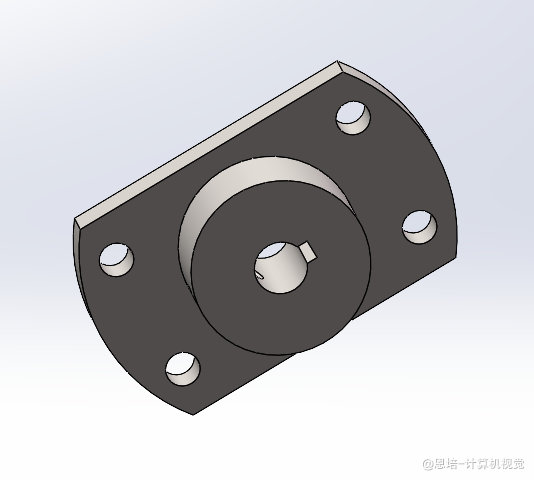 |
键槽法兰 | CNC 加工 | 3 | 用于传递扭矩 |
| 10007 |  |
腰关节铝片正面 | CNC 加工 | 1 | 用来固定电机 |
| 10008 |  |
腰关节铝片背面 | CNC 加工 | 1 | 用来固定电机 |
| 10022 |  |
小臂铝片正面 | CNC 加工 | 1 | 用来固定电机 |
| 10023 |  |
小臂铝片背面 | CNC 加工 | 1 | 用来固定电机 |
| 10027 | 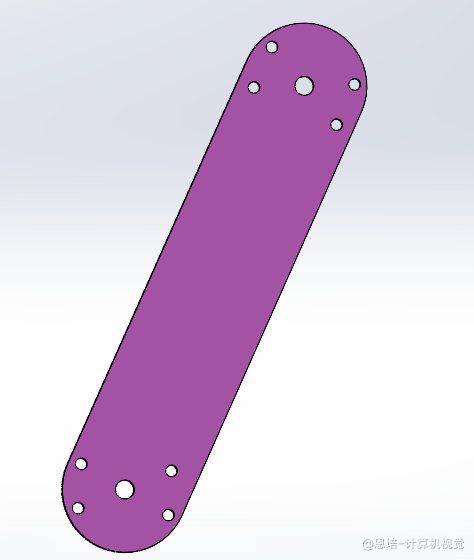 |
大臂铝板 | CNC 加工 | 1 | 支撑大臂,连接电机、法兰 |
| 10001 | 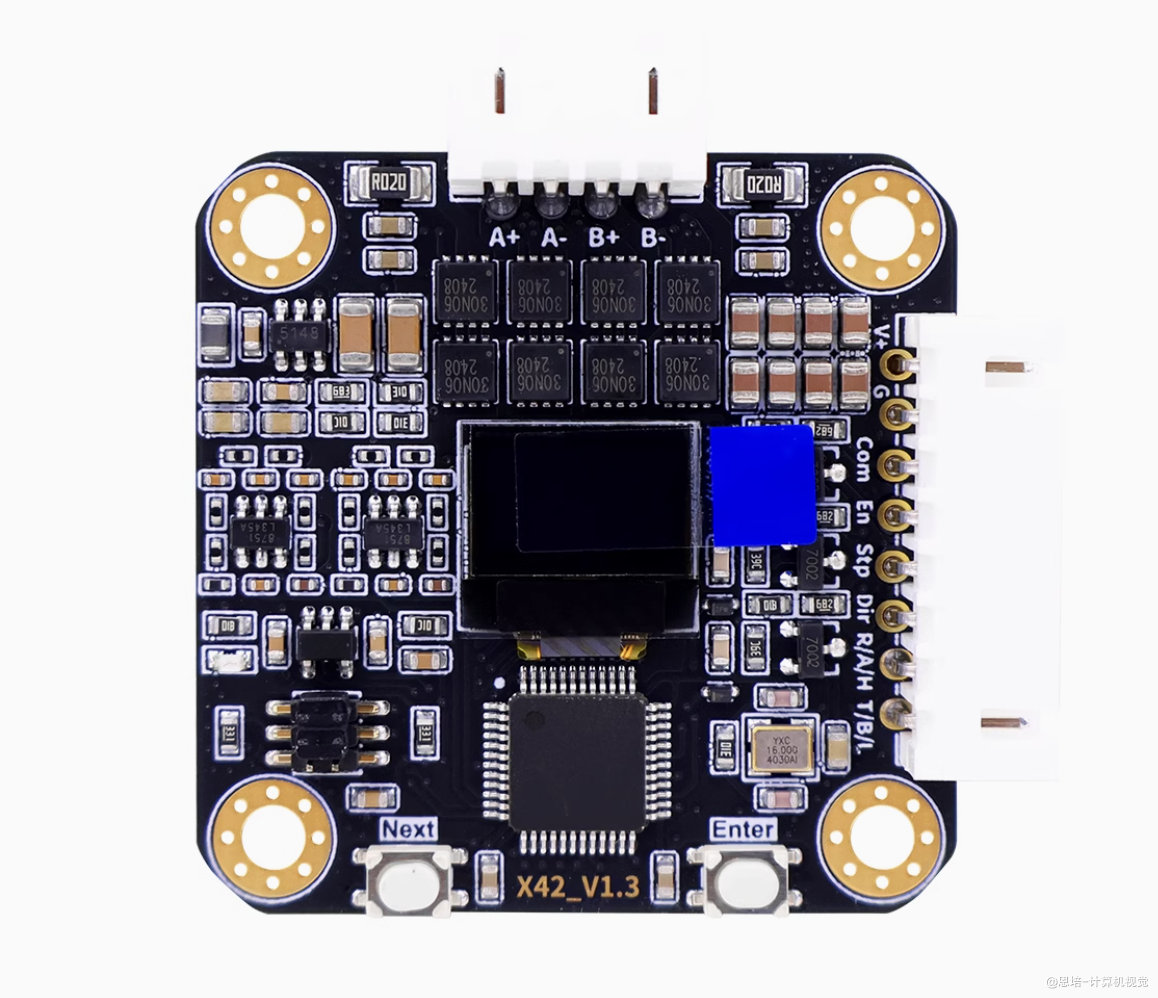 |
电机驱动 | 采购 | 6 | 电机驱动,这里用的是张大头家 CAN 套餐 |
| 10004 | 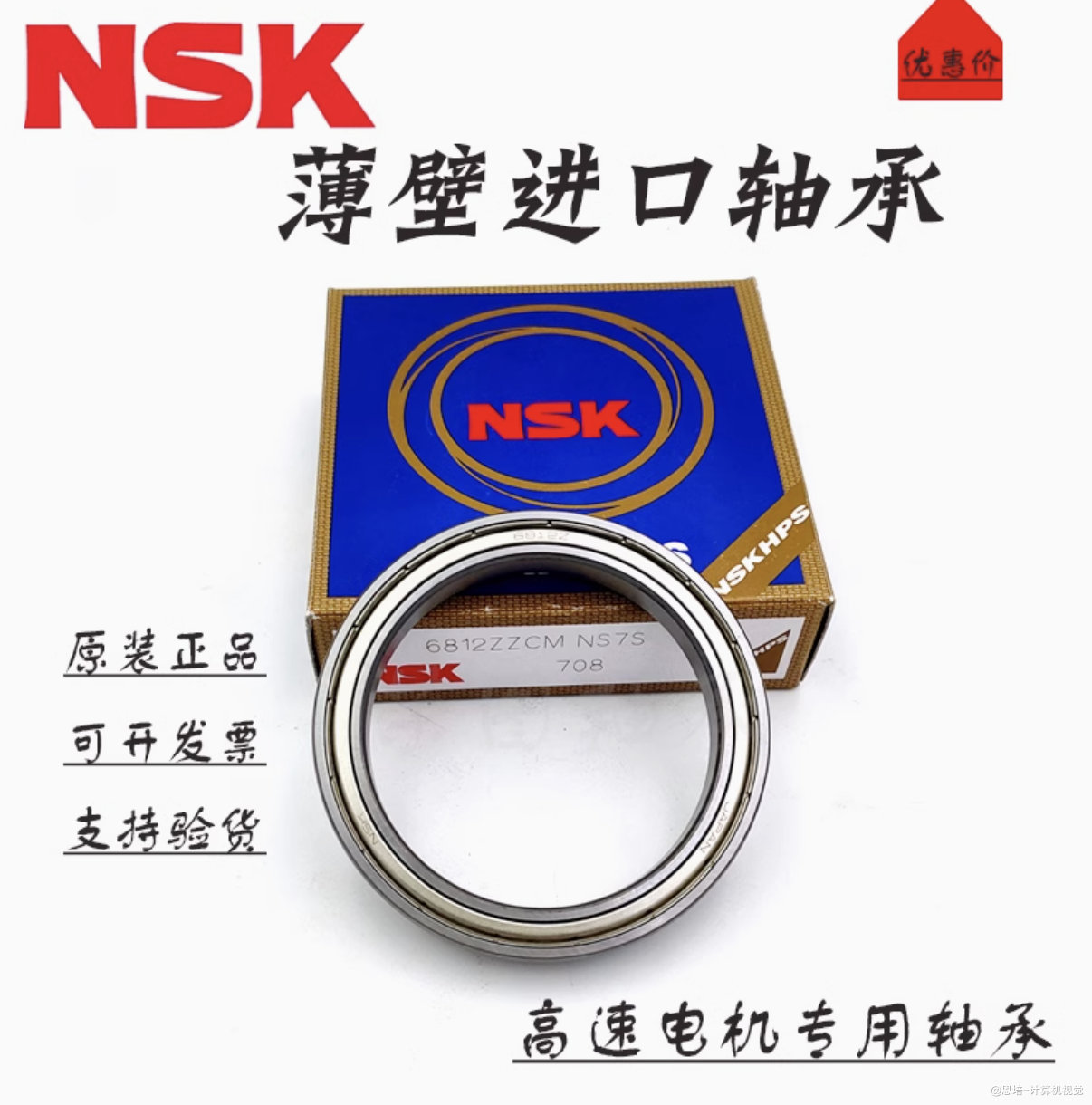 |
小轴承 | 采购 | 4 | 轴承 |
| 10005 | 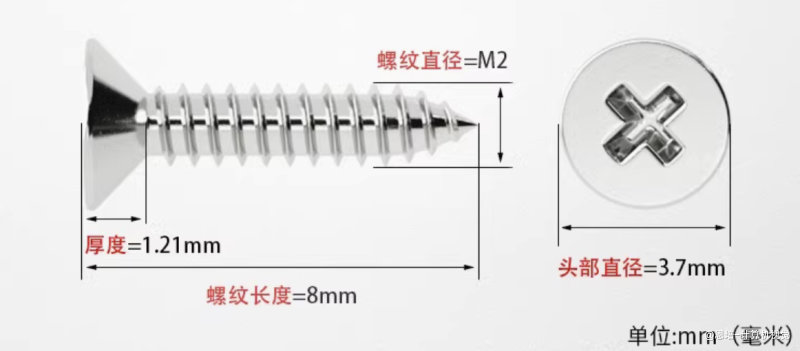 |
自攻螺钉 M2×8 | 采购 | 20 | 用于紧固盖子 |
| 10006 |  |
自攻螺丝 M6×16 | 采购 | 4 | 用于紧固固定底座,比如固定在木板上 |
| 10011 |  |
胶水 | 采购 | 1 | 用于将磁铁站在电机轴上 |
| 10012 | / | 联轴器 | 采购 | 1 | 联轴器 |
| 10014 | / | 电子线-绿蓝 | 采购 | 0.35m | CAN 信号线 |
| 10015 | / | 电子线-红黑 | 采购 | 0.35m | 电源正负线 |
| 10018 |  |
带灯按钮开关 | 采购 | 1 | 开关 |
| 10026 | 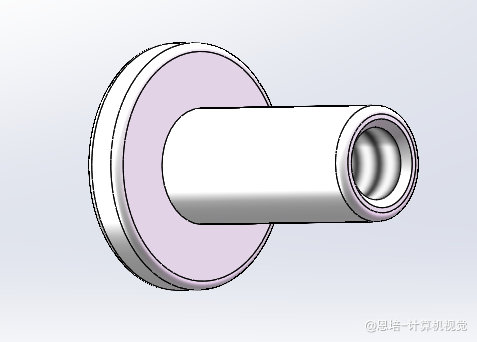 |
倒边螺母 M3x8 | 采购 | 12 | 连接腕部与轴承 |
| 10029 | 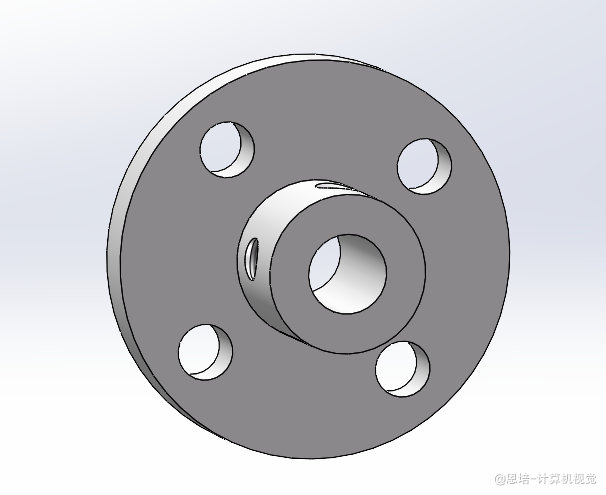 |
导向轴支座 | 采购 | 1 | 连接末端与电机输出轴 |
| 10032 | 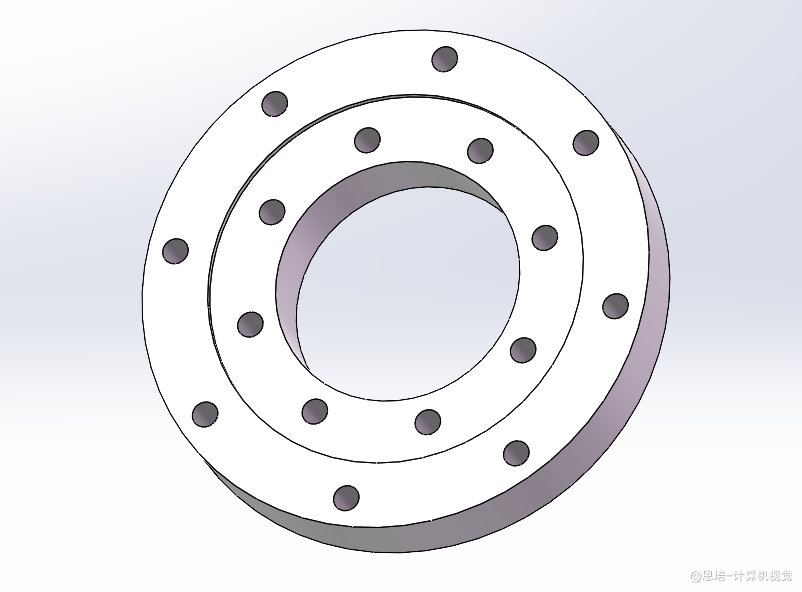 |
回转支承 | 采购 | 1 | 固定底座与腰部连接部件 |
| 10034 |  |
同步带 | 采购 | 1 | 同步带 |
| 10036 |  |
USB2CAN 转换器 | 采购 | 1 | 插在电脑控制机械臂 |
| 10038 |  |
电机 L60/20:1 | 采购 | 1 | 第 2 个关节电机、减速器 |
| 10039 | 类似 10038 | 电机 L48/25:1 | 采购 | 1 | 第 1 个关节电机、减速器 |
| 10040 | 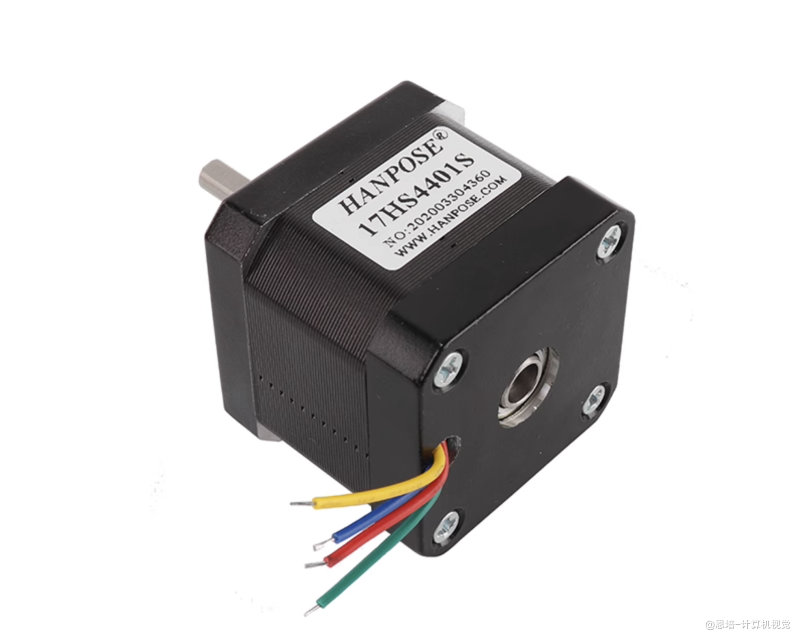 |
电机 L40 | 采购 | 2 | 第 5、6 个关节电机 |
| 10041 | 类似 10038 | 电机 L34/25:1 | 采购 | 1 | 第 3 个关节电机、减速器 |
| 10042 | 类似 10038 | 电机 L34/10:1 | 采购 | 1 | 第 4 个关节电机、减速器 |
| 10047 | 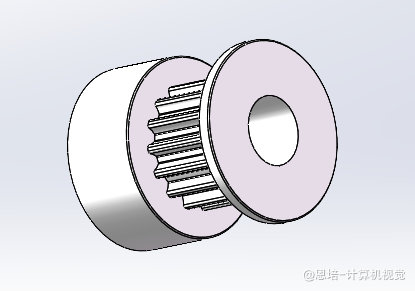 |
J5 15 齿同步轮 | 采购 | 1 | 同步带轮,连接电机与同步带 |
| 10048 | 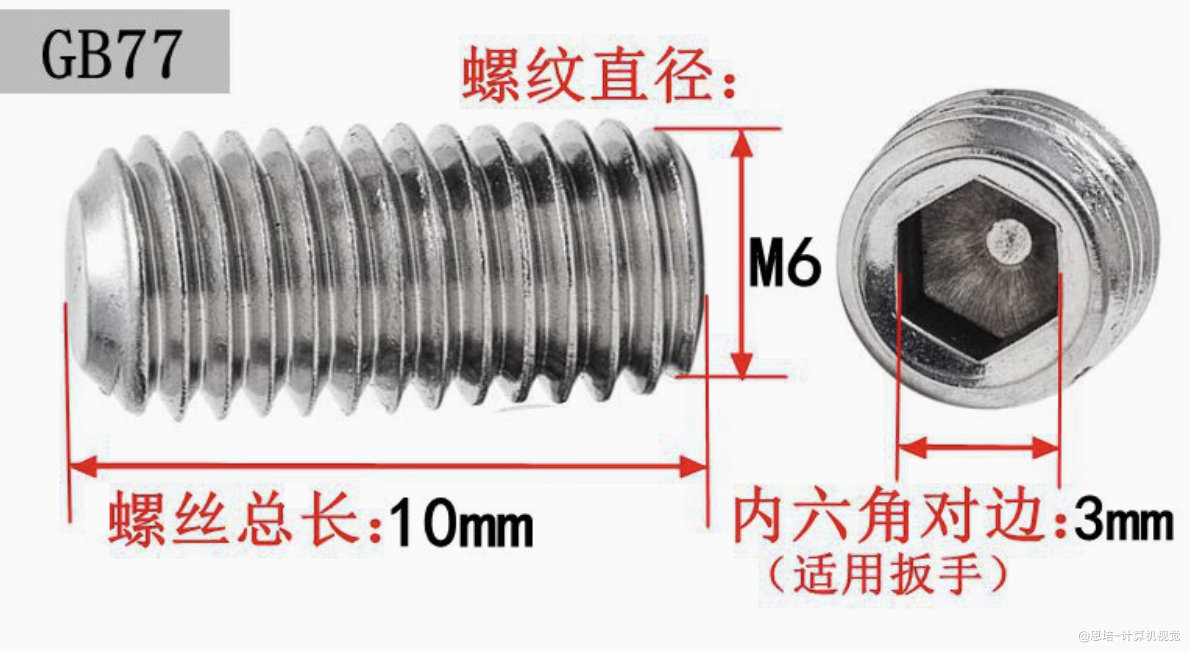 |
紧定螺钉 M6×10 | 采购 | 4 | 紧定键槽法兰与电机输出轴 |
| 10049 |  |
螺钉 M8×25 | 采购 | 15 | 螺钉 |
| 10050 | / | 螺钉 M6×16 | 采购 | 4 | 螺钉 |
| 10051 | / | 螺钉 M5×50 | 采购 | 2 | 螺钉 |
| 10052 | / | 螺钉 M5×25 | 采购 | 2 | 螺钉 |
| 10053 | / | 螺钉 M5×16 | 采购 | 9 | 螺钉 |
| 10054 | / | 螺钉 M4×10 | 采购 | 13 | 螺钉 |
| 10055 | / | 螺钉 M3×8 | 采购 | 6 | 螺钉 |
| 10056 | / | 螺钉 M3×60 | 采购 | 8 | 螺钉 |
| 10057 | / | 螺钉 M3×5 | 采购 | 6 | 螺钉 |
| 10058 | / | 螺钉 M3×40 | 采购 | 20 | 螺钉 |
| 10059 | / | 螺钉 M3×35 | 采购 | 8 | 螺钉 |
| 10060 | / | 螺钉 M3×20 | 采购 | 2 | 螺钉 |
| 10061 | / | 螺钉 M3×16 | 采购 | 8 | 螺钉 |
| 10062 | / | 螺钉 M3×10 | 采购 | 12 | 螺钉 |
| 10065 | 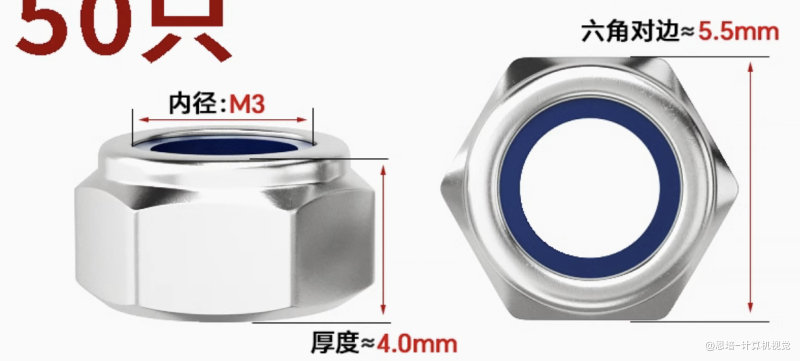 |
螺母 M3 | 采购 | 19 | 螺母 |
| 10066 |  |
DC 12V 插座 | 采购 | 1 | 12V 适配器电源插座 |
| 10067 | 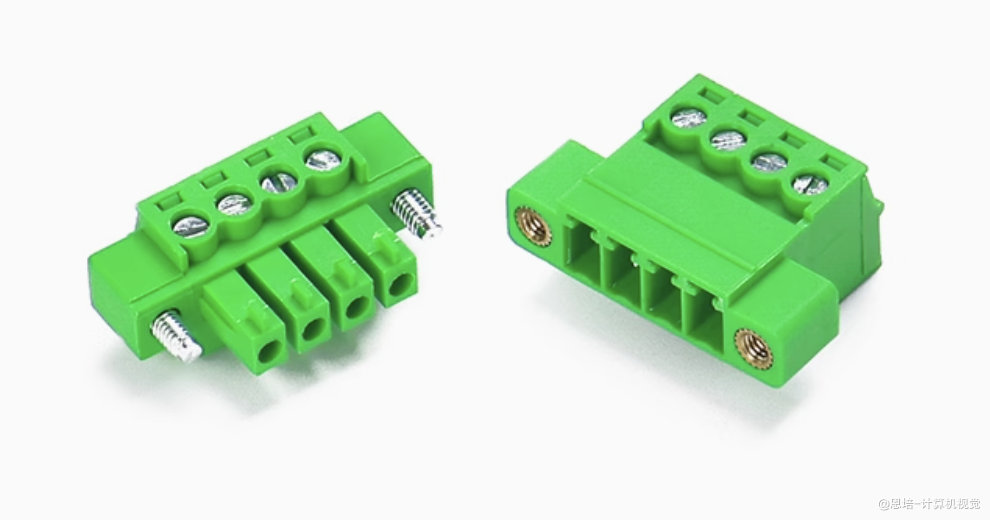 |
4P 排插 | 采购 | 1 | 为夹爪控制盒预留信号线和电源线 |
| 10068 |  |
3x3x14 键 | 采购 | 4 | 插入键槽法兰 |
| 10071 |  |
2 芯软线 | 采购 | 1.5m | 连接 USB2CAN 转接头与 2P 排插 |
| 10072 | 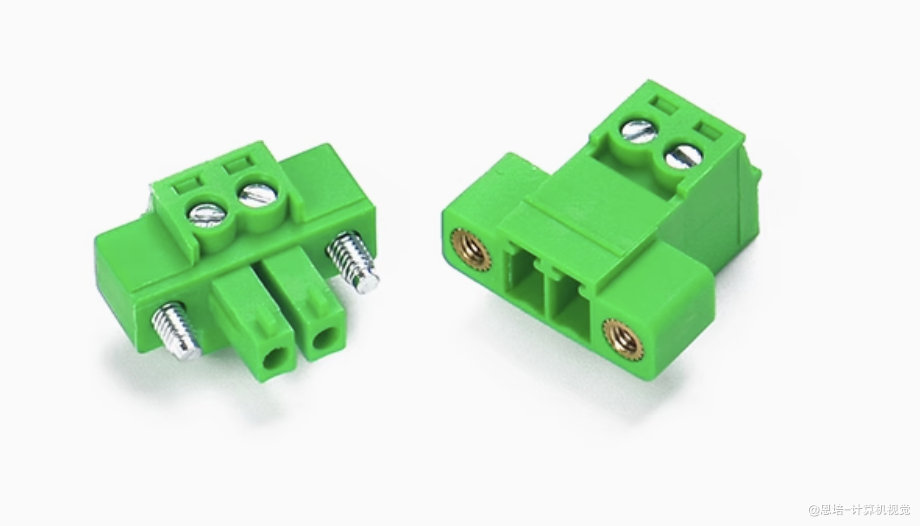 |
2P 排插 | 采购 | 1 | 连接 2 芯软线 |
| 10073 |  |
12V 电源 | 采购 | 1 | 12V 电源适配器 |
| 10074 |  |
3MM 扳手 | 采购 | 1 | 紧固 键槽法兰的紧定螺钉 |
| 10075 |  |
2.5MM 扳手 | 采购 | 1 | 紧固小臂旋转 |
| 10076 | / | 1.5MM 扳手 | 采购 | 1 | 紧固末端导向轴支座 |
| 10077 | 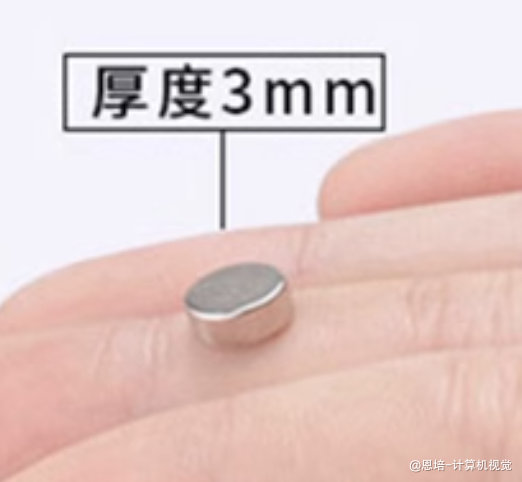 |
磁铁 | 采购 | 6 | 安装在电机末端,用于驱动器测量角度 |
| 10079 |  |
驱动-8P 通讯线 | 驱动配套 | 6 | 驱动配套 |
| 10080 | 同上 | 驱动-4P 电机线 | 驱动配套 | 6 | 驱动配套 |
| 10081 | 同上 | 驱动-注塑外壳 | 驱动配套 | 6 | 驱动配套 |
| 10083 |  |
热缩管 | 采购 | 0.6m | 接电子线用 |
| 10084 |  |
包线管 | 采购 | 0.6m | 包裹电子线 |
| 10085 | 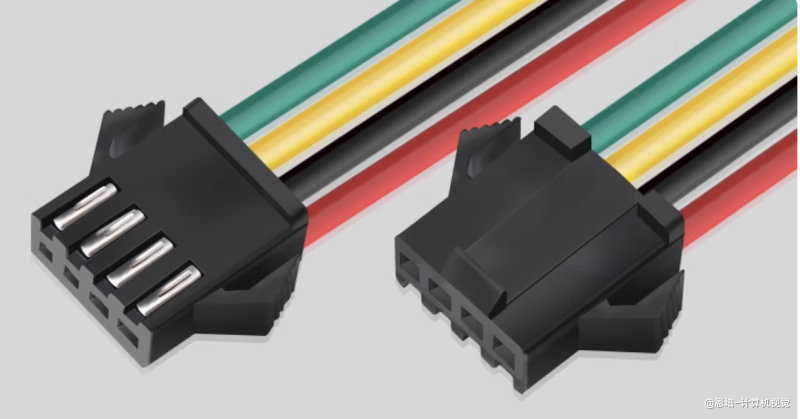 |
4P 连接线对插 | 采购 | 1 | 接电子线用 |
| 10086 |  |
长款电机配套 4P 线 | 采购 | 1 | 接电子线用 |
| 10087 |  |
快速接线端子 | 采购 | 4 | 接电子线用 |
| 10088 | 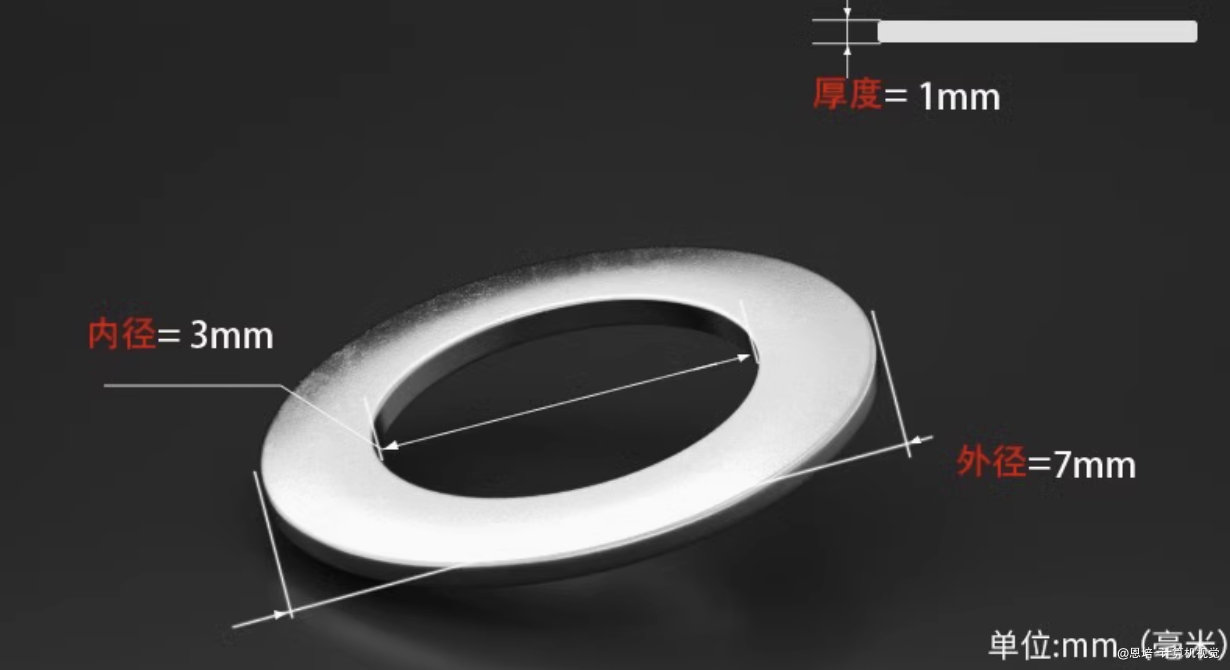 |
371 金属垫片 | 采购 | 6 | 垫片 |
| 10090 | / | 3x7x3 垫片 | 采购 | 10 | 第 5、6 号电机专用垫片 |
| 10091 | / | 螺钉 M4×14 | 采购 | 4 | 拧小臂旋转 |
| 10092 | / | 螺钉 M3×48 | 采购 | 5 | 安装驱动板 |
2.2 夹爪装箱单
- 套餐二装箱一共 47 种零件(最后一个为 30047)
- 如果漏发、多发、发错、损坏请联系小助手(微信:ffcv1024 或 bbxz1024)
| 零件编号 | 图示 | 名称 | 类型 | 1 成品实际数量 |
|---|---|---|---|---|
| 30001 | 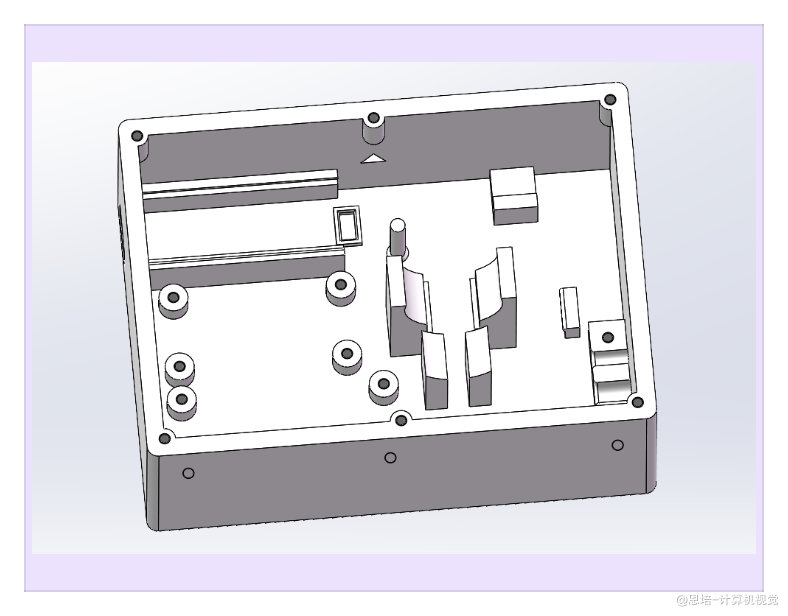 |
主控盒底座 | 3D 打印 | 1 |
| 30002 | 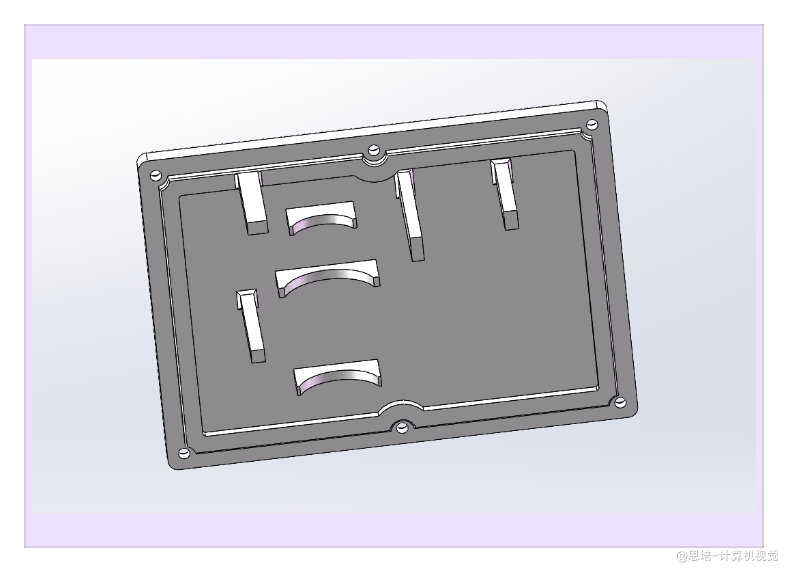 |
主控盒盖子 | 3D 打印 | 1 |
| 30003 | 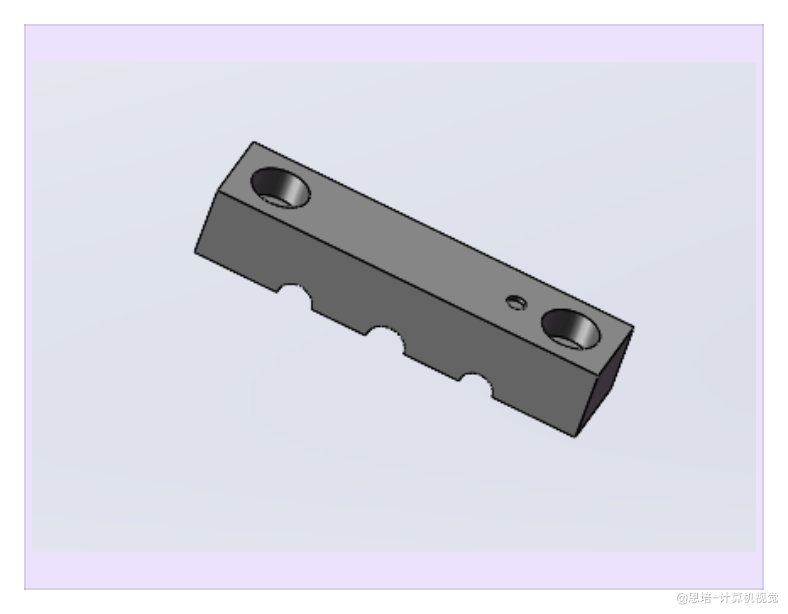 |
主控盒压线盖子 | 3D 打印 | 1 |
| 30004 | 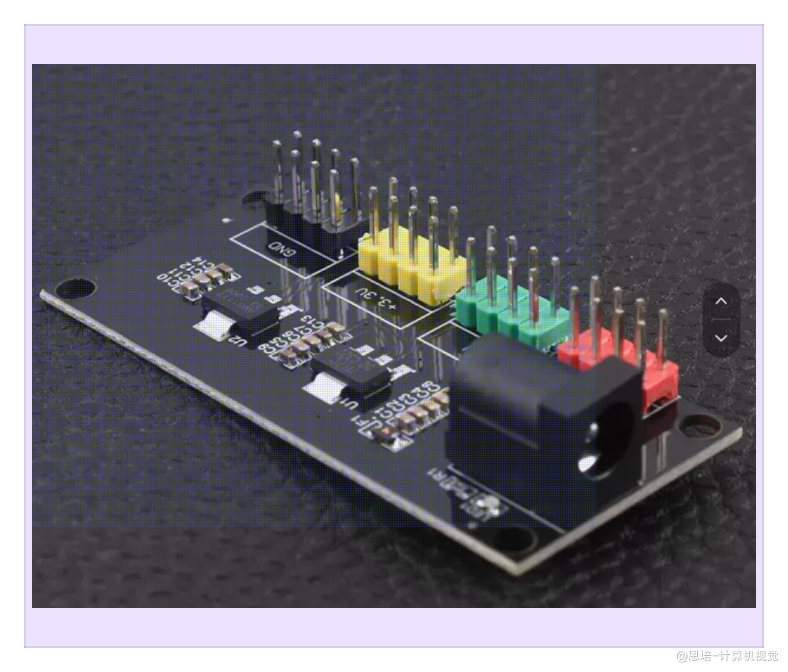 |
DCDC 三通道输出 | 采购 | 1 |
| 30005 | 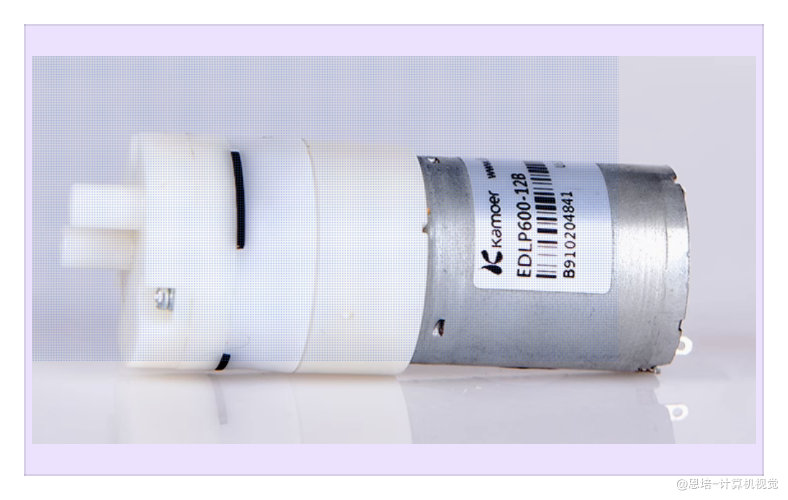 |
真空泵电机 | 采购 | 1 |
| 30006 | 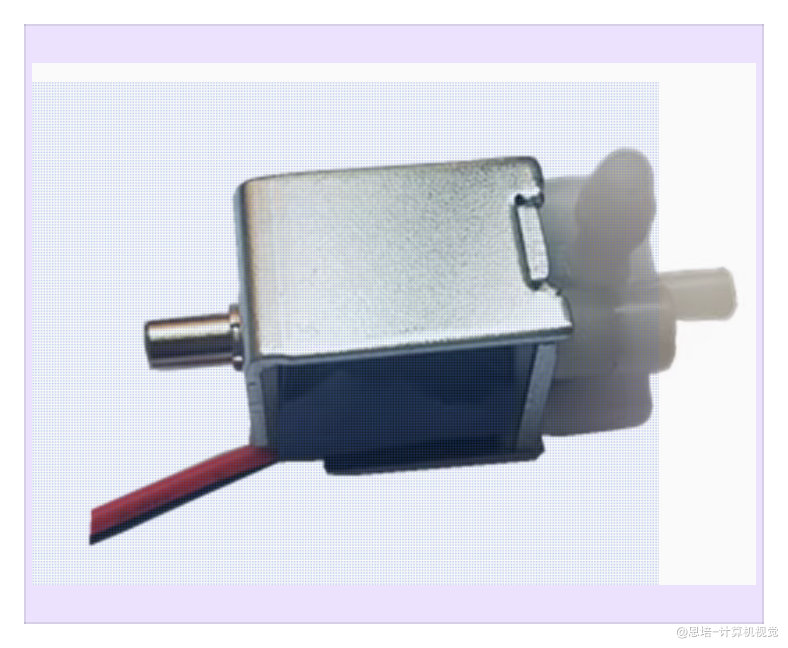 |
三通电磁阀 | 采购 | 1 |
| 30007 | 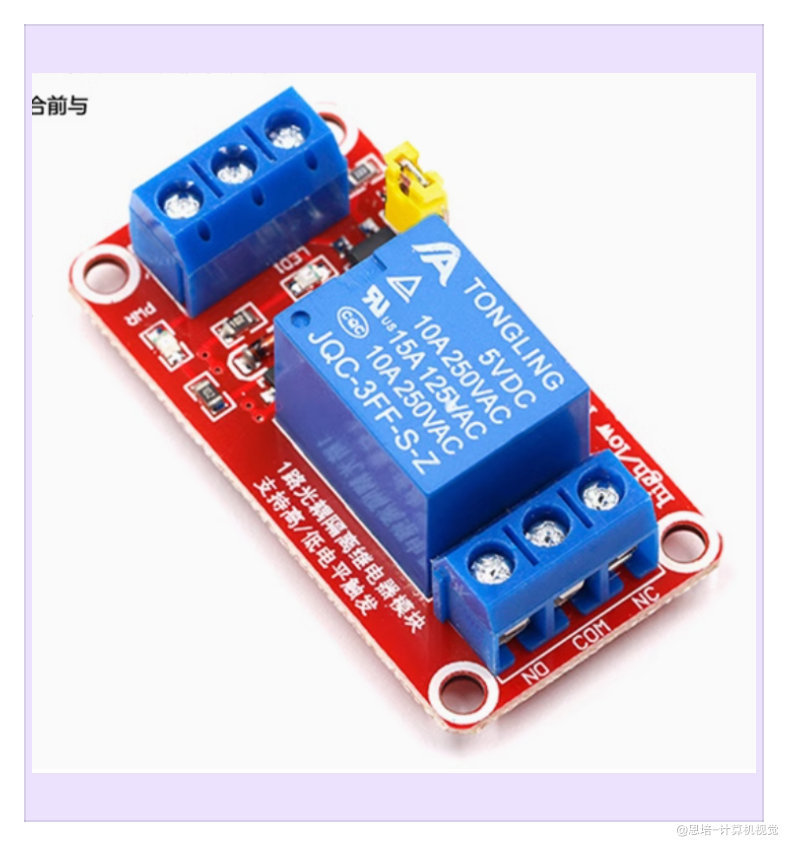 |
继电器 | 采购 | 1 |
| 30008 | 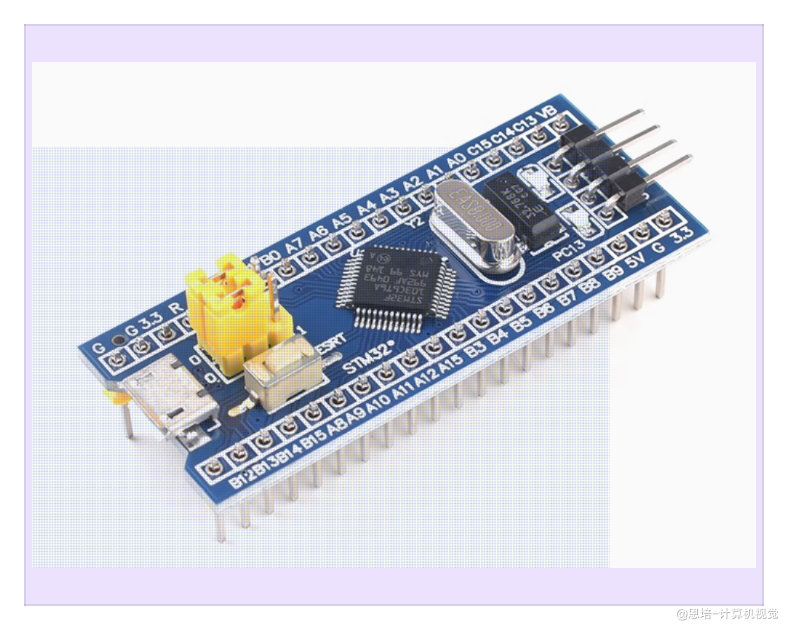 |
STM32 主控 | 采购 | 1 |
| 30009 | 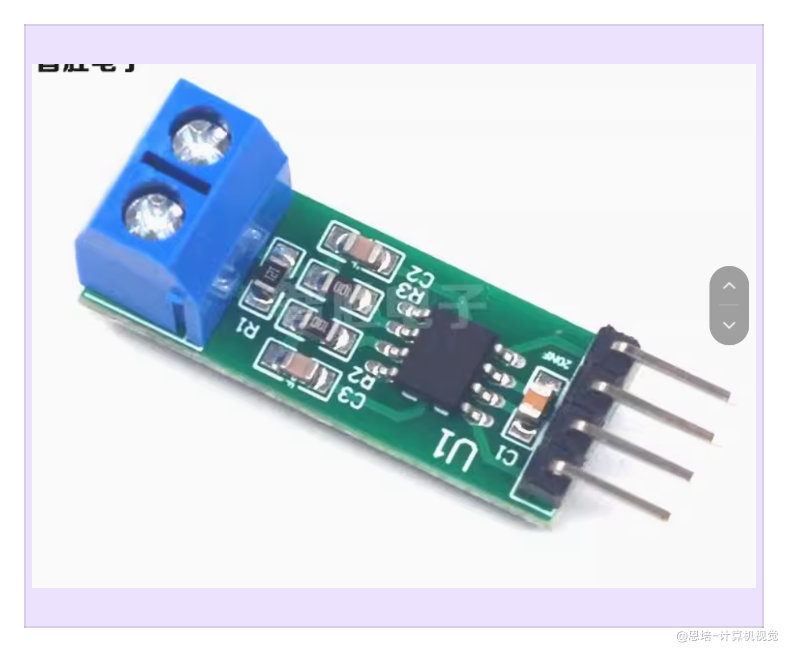 |
CAN 收发器 | 采购 | 1 |
| 30010 |  |
12V 公头 | 采购 | 1 |
| 30011 | 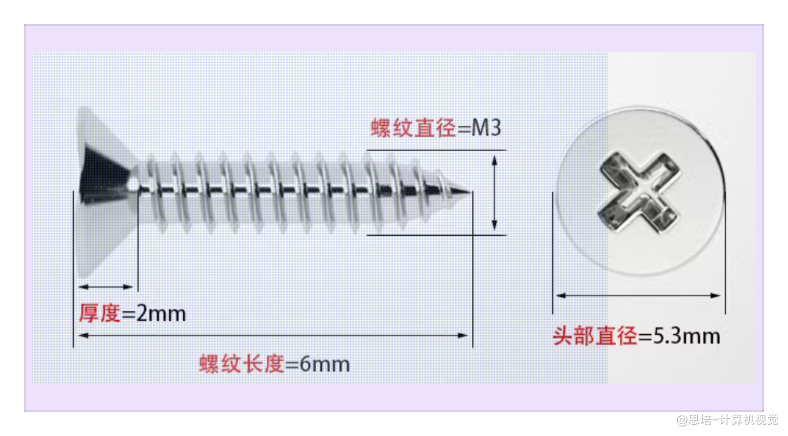 |
自攻螺钉 M3×6 | 采购 | 10 |
| 30012 | 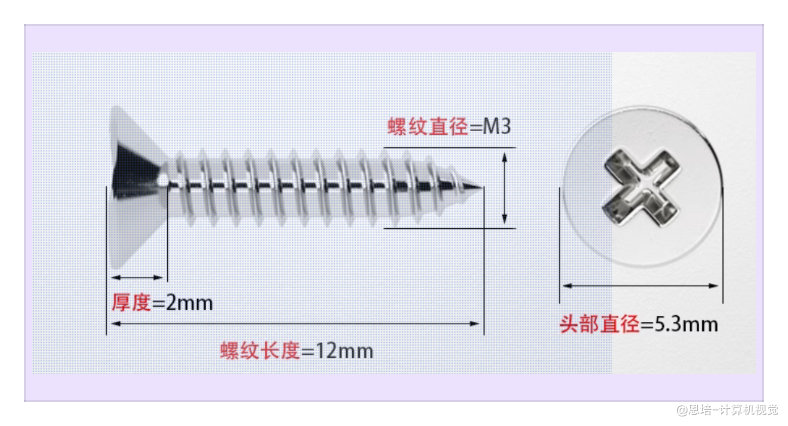 |
自攻螺钉 M3×12 | 采购 | 10 |
| 30013 | 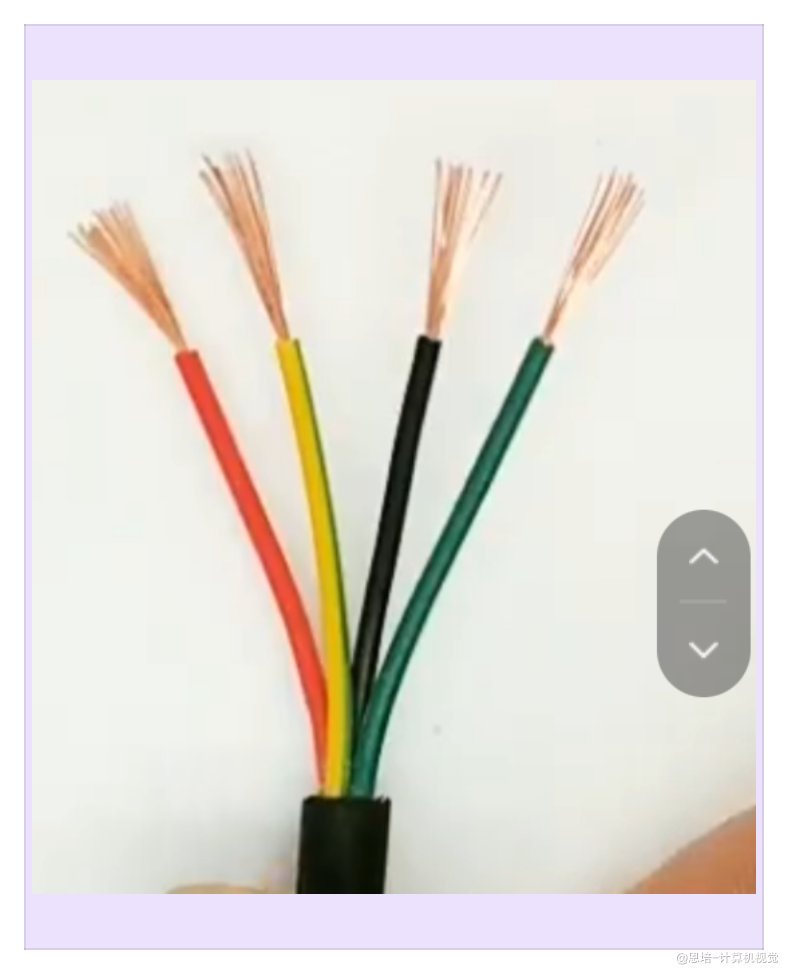 |
4 芯软线 | 采购 | 0.5 |
| 30014 | 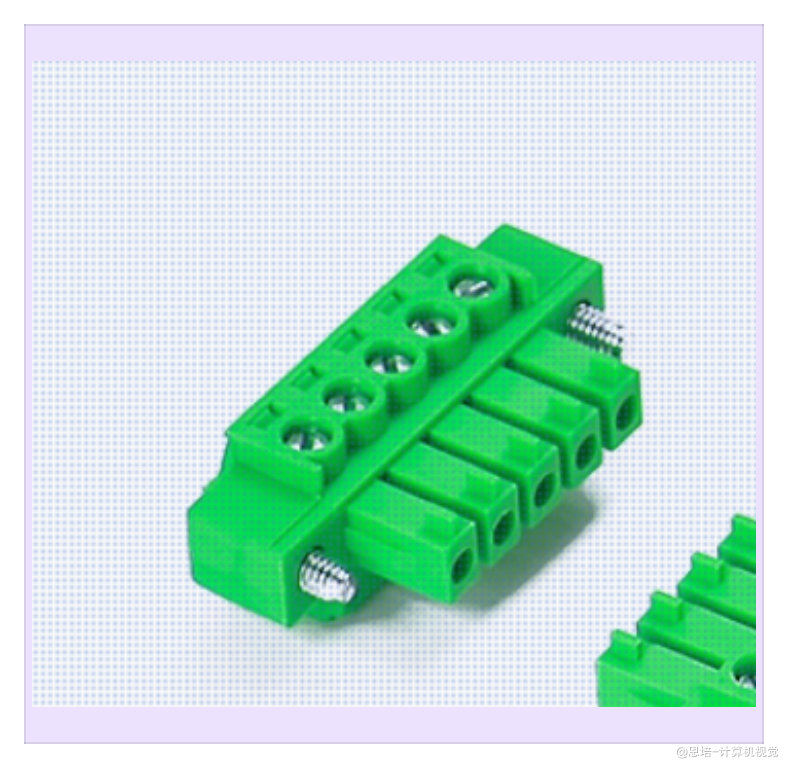 |
4P 排插针座 | 采购 | 1 |
| 30015 | 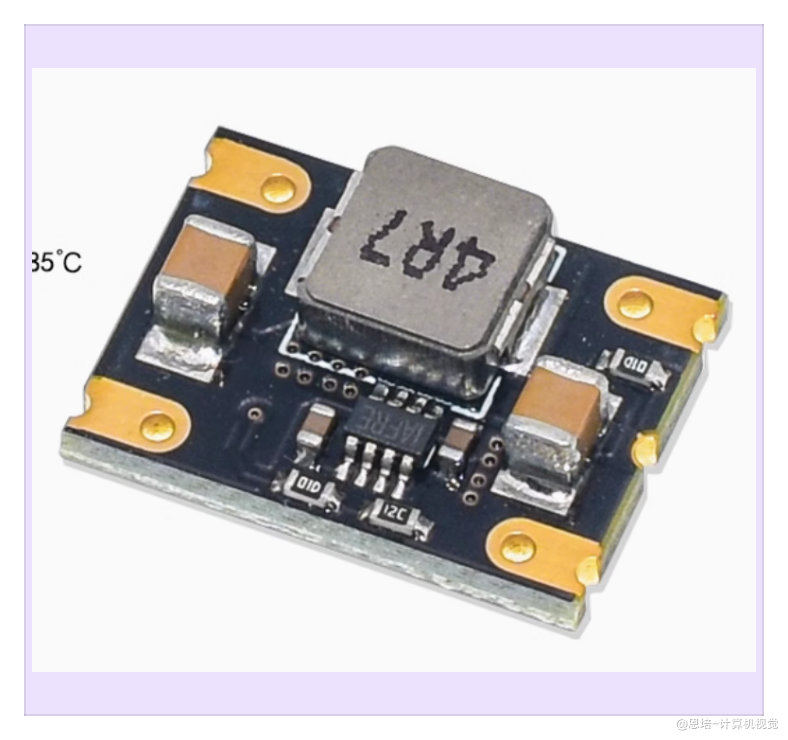 |
12V 转 7.4V 降压模块 | 采购 | 1 |
| 30016 |  |
杜邦线母对母 | 采购 | 9 |
| 30017 |  |
杜邦线公对母 | 采购 | 22 |
| 30018 | / | 热缩管 | 采购 | 0.3 |
| 30019 | 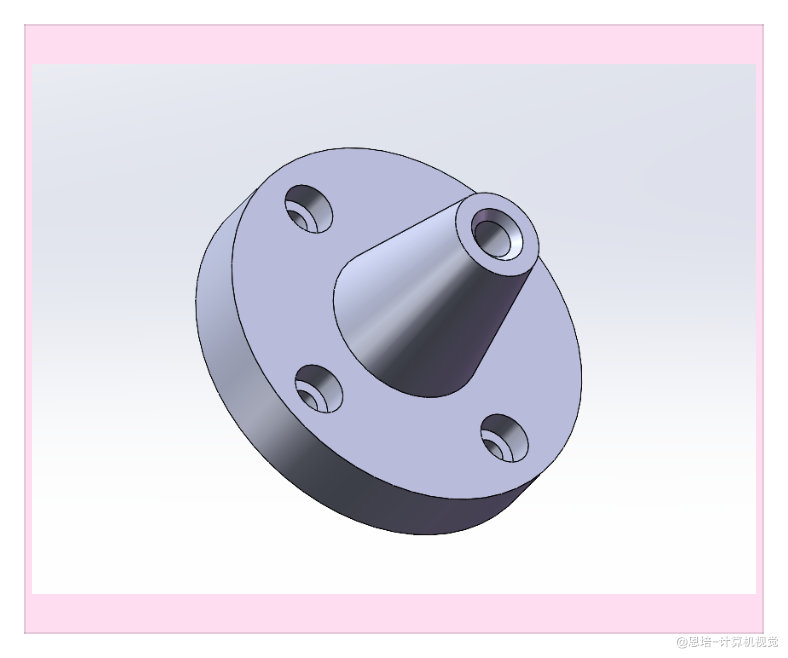 |
真空吸盘安装端 | 3D 打印 | 1 |
| 30020 |  |
吸盘座金具 | 采购 | 1 |
| 30021 |  |
硅胶吸嘴 | 采购 | 1 |
| 30022 |  |
硅胶管 | 采购 | 1.2 |
| 30023 | 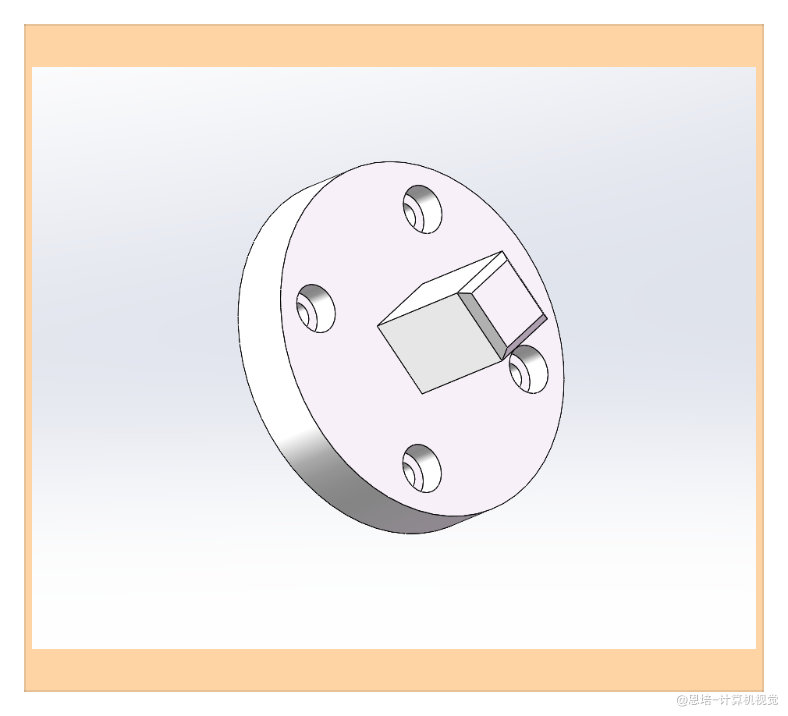 |
夹爪端侧安装 | 3D 打印 | 1 |
| 30024 |  |
连杆主体支撑 | 3D 打印 | 1 |
| 30025 |  |
连杆 | 3D 打印 | 4 |
| 30026 | 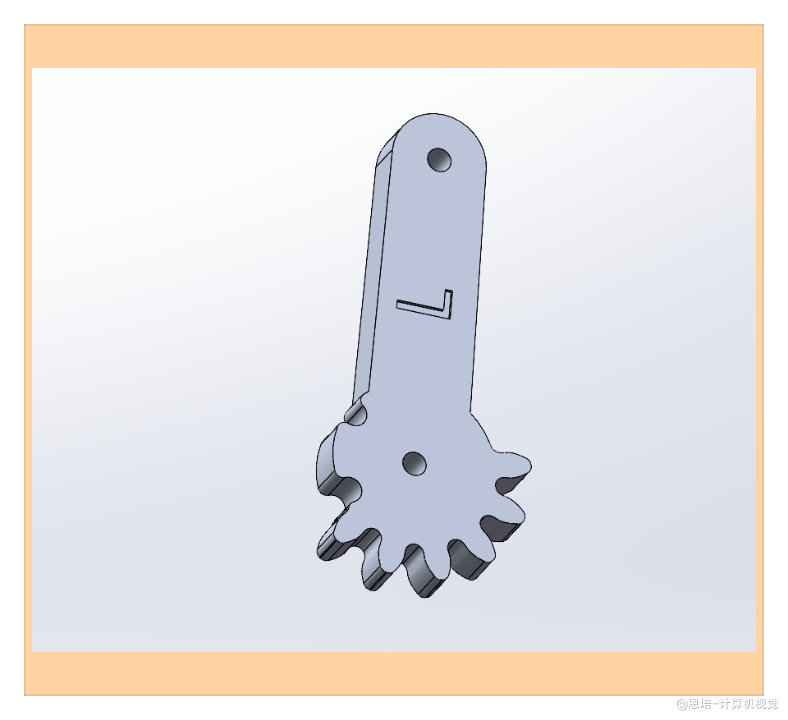 |
齿轮连杆-左侧 | 3D 打印 | 1 |
| 30027 | 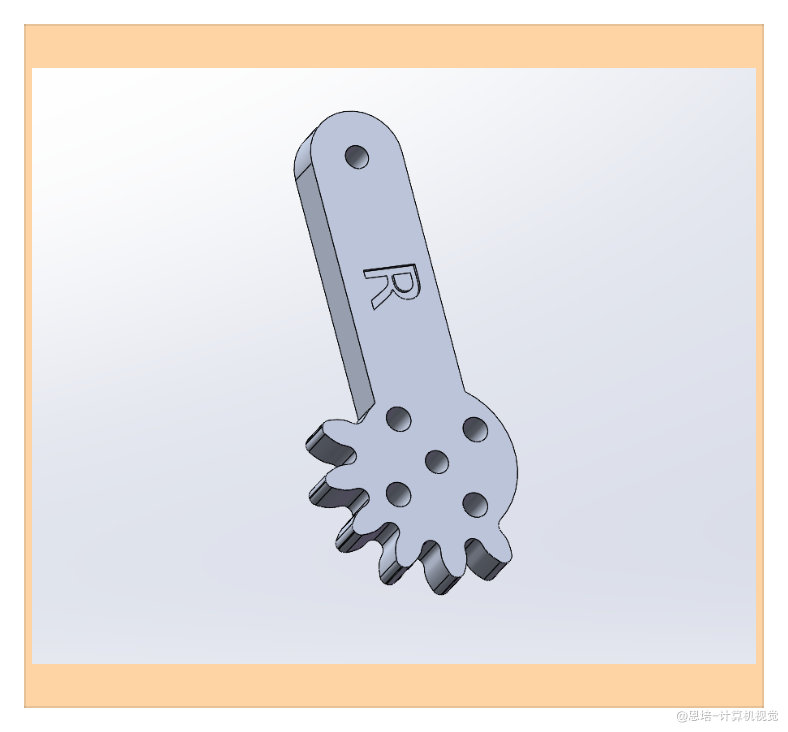 |
齿轮连杆-右侧 | 3D 打印 | 1 |
| 30028 | 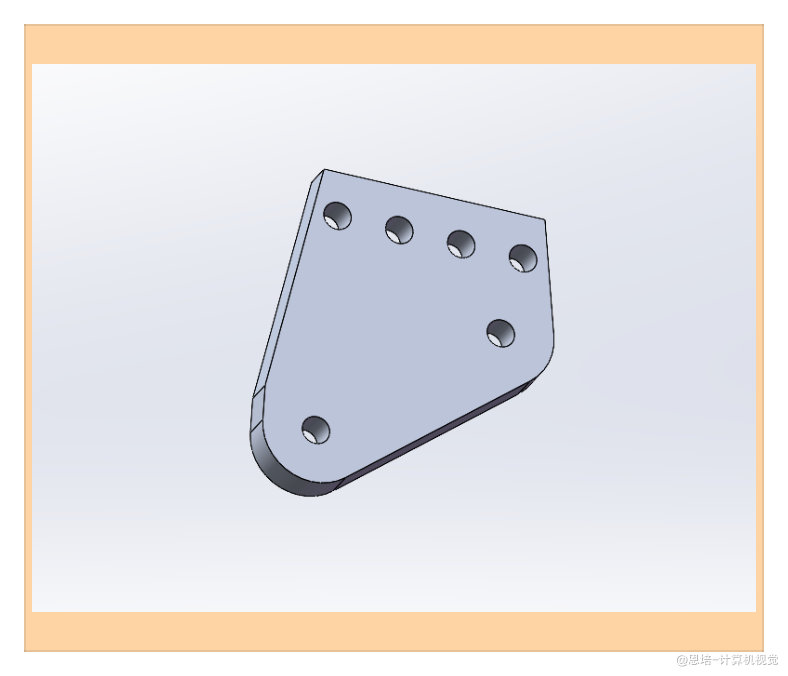 |
夹爪-上盖子-左侧 | 3D 打印 | 1 |
| 30029 | 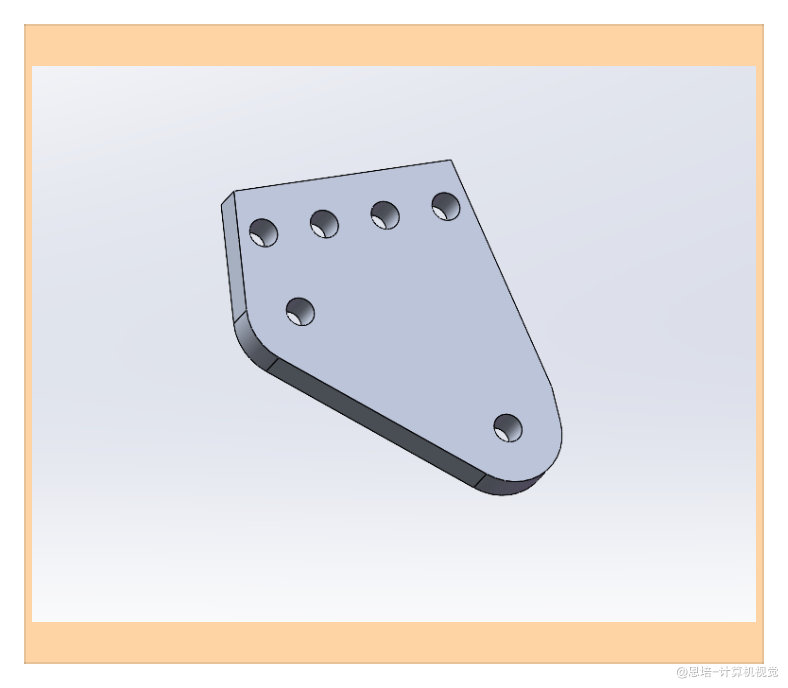 |
夹爪-上盖子-右侧 | 3D 打印 | 1 |
| 30030 | 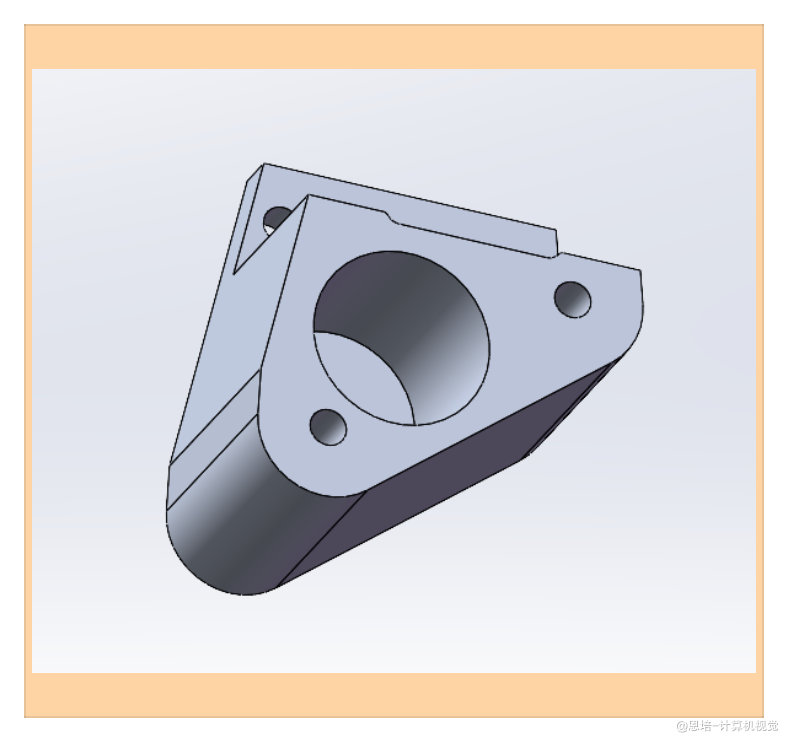 |
夹爪-下支撑-左侧 | 3D 打印 | 1 |
| 30031 | 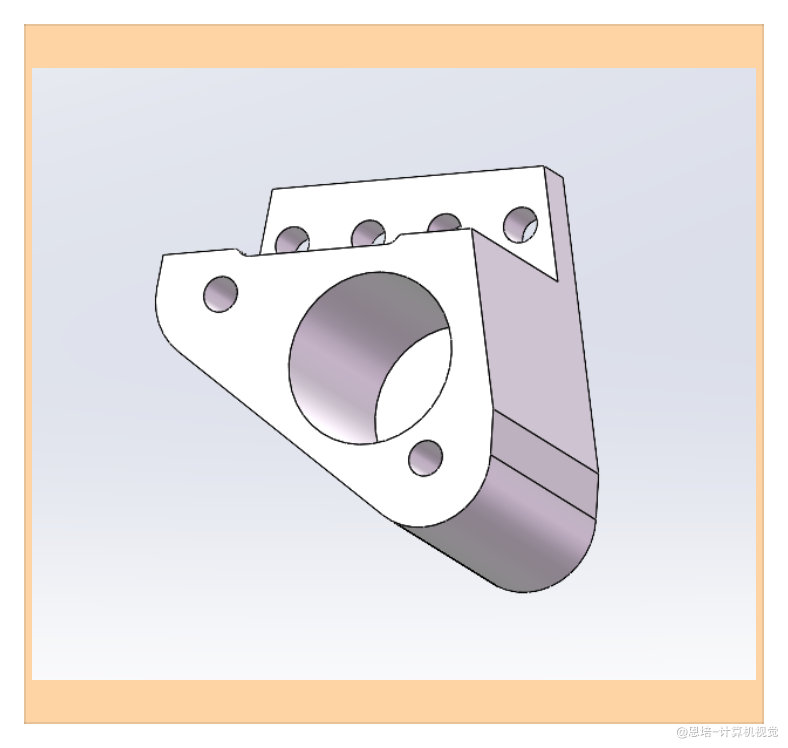 |
夹爪-下支撑-右侧 | 3D 打印 | 1 |
| 30032 | 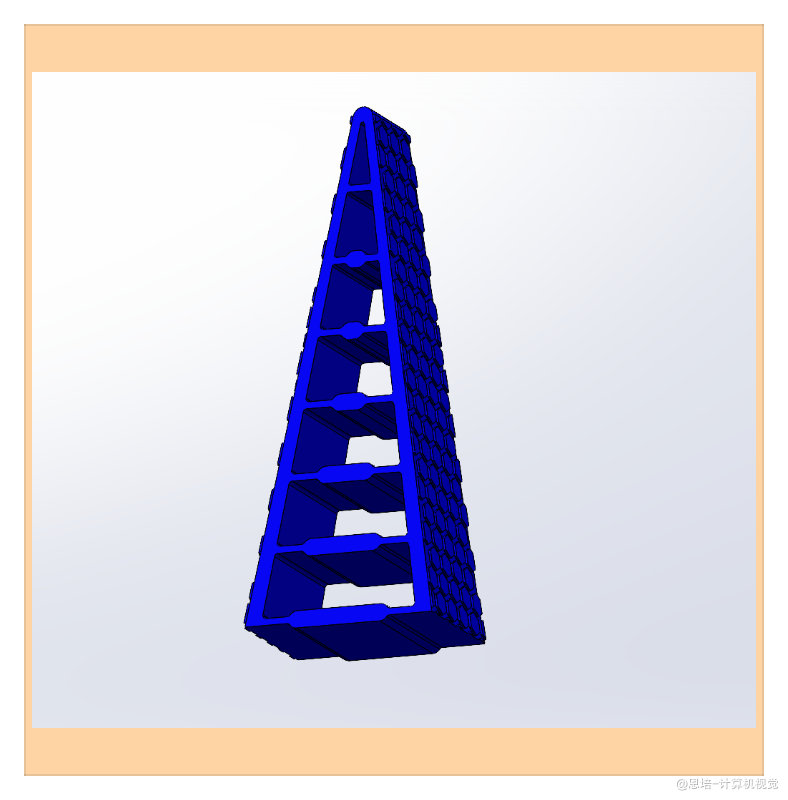 |
柔性夹爪 | 3D 打印 | 2 |
| 30033 | 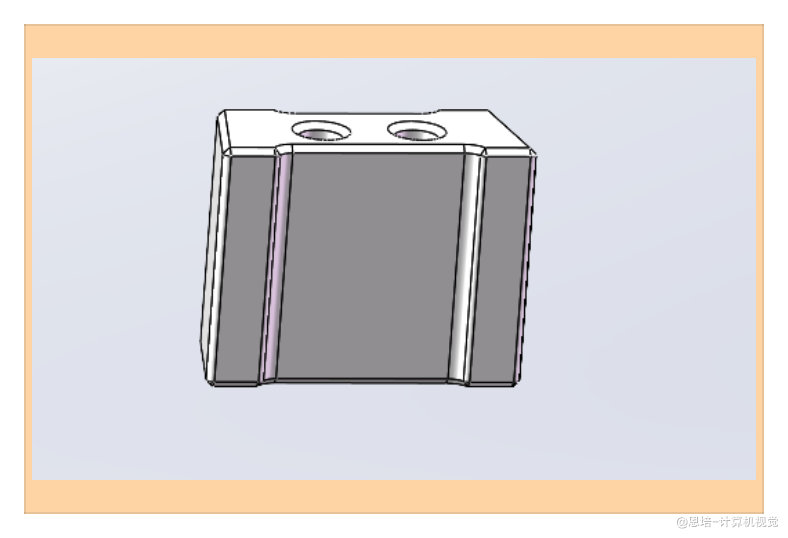 |
夹爪支撑连接块 | 3D 打印 | 2 |
| 30034 |  |
25kg 舵机 | 采购 | 1 |
| 30035 | 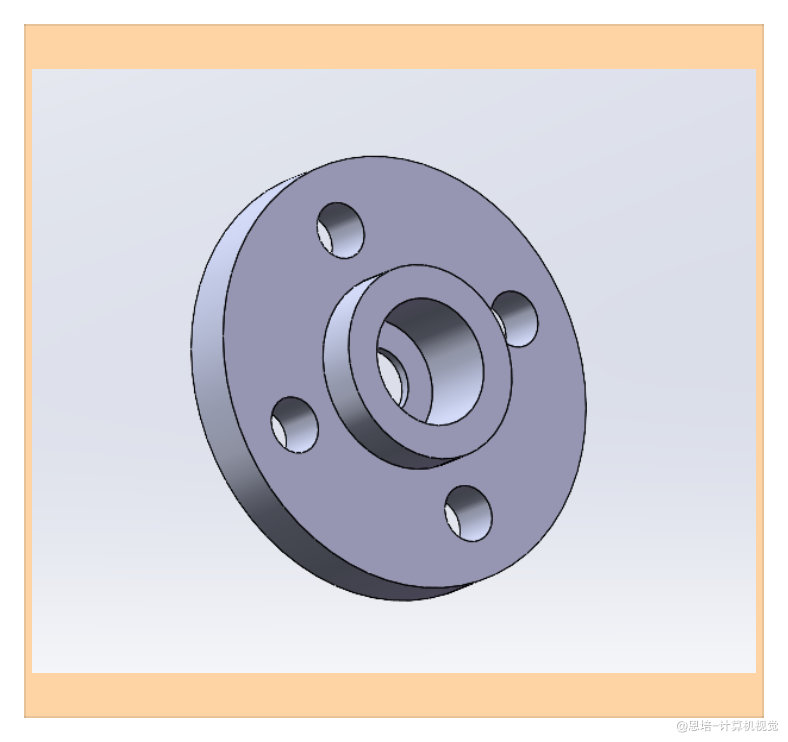 |
金属舵盘 | 采购 | 1 |
| 30036 | 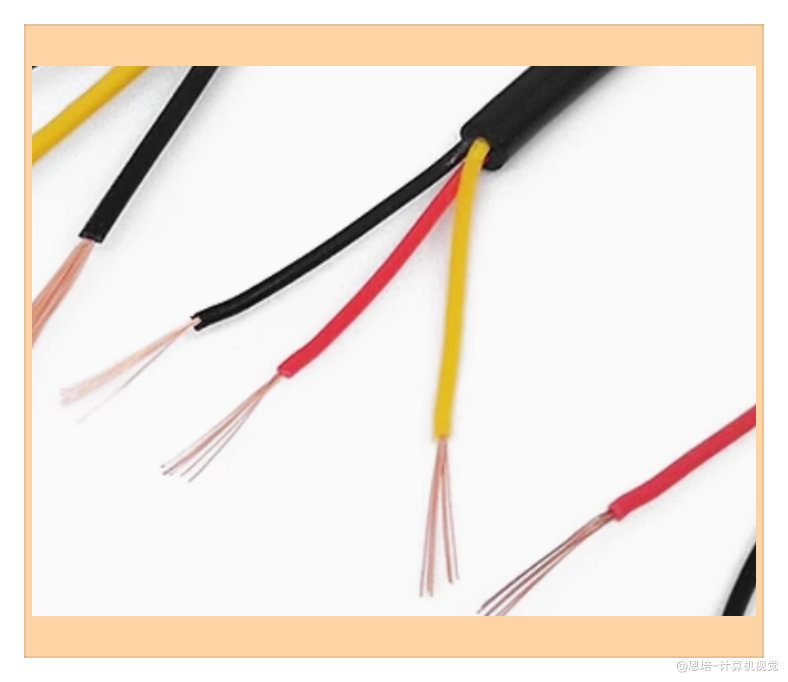 |
3 芯软线 | 采购 | 1.2 |
| 30037 | / | GB/T6172.2-2000 非金属嵌件六角锁紧薄螺母 3 | 采购 | 18 |
| 30038 | / | GB/T70.1-2000 内六角圆柱头螺钉 M3×30 | 采购 | 5 |
| 30039 | / | GB/T70.1-2000 内六角圆柱头螺钉 M3×40 | 采购 | 7 |
| 30040 | / | M3x7x1 金属垫片 | 采购 | 15 |
| 30041 | / | GB/T70.1-2000 内六角圆柱头螺钉 M3×20 | 采购 | 5 |
| 30042 |  |
平头螺钉 M3x18 | 采购 | 2 |
| 30043 | / | GB/T70.1-2000 内六角圆柱头螺钉 M3×14 | 采购 | 3 |
| 30044 | / | GB/T70.1-2000 内六角圆柱头螺钉 M3×8 | 采购 | 5 |
| 30045 | 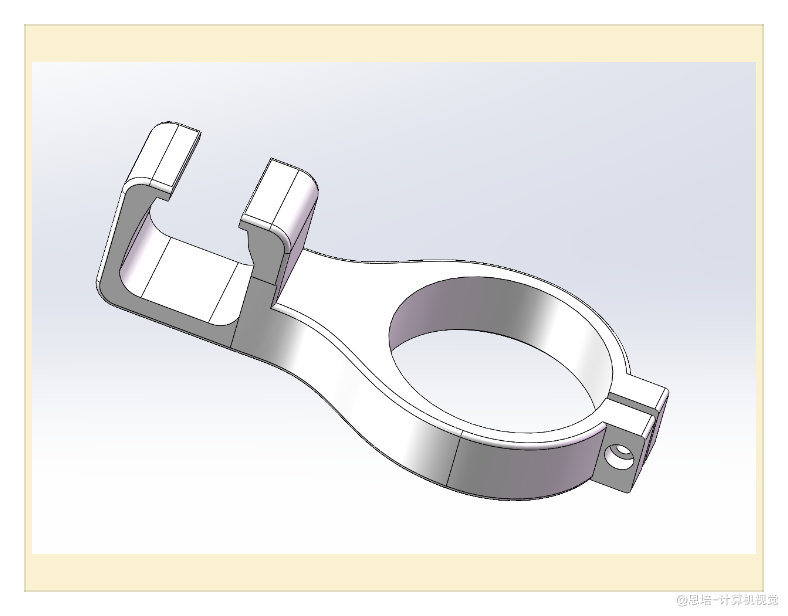 |
D435 深度相机支架 | 3D 打印 | 1 |
| 30046 |  |
Aruco 视觉标定板 | 3D 打印 | 1 |
| 30047 | 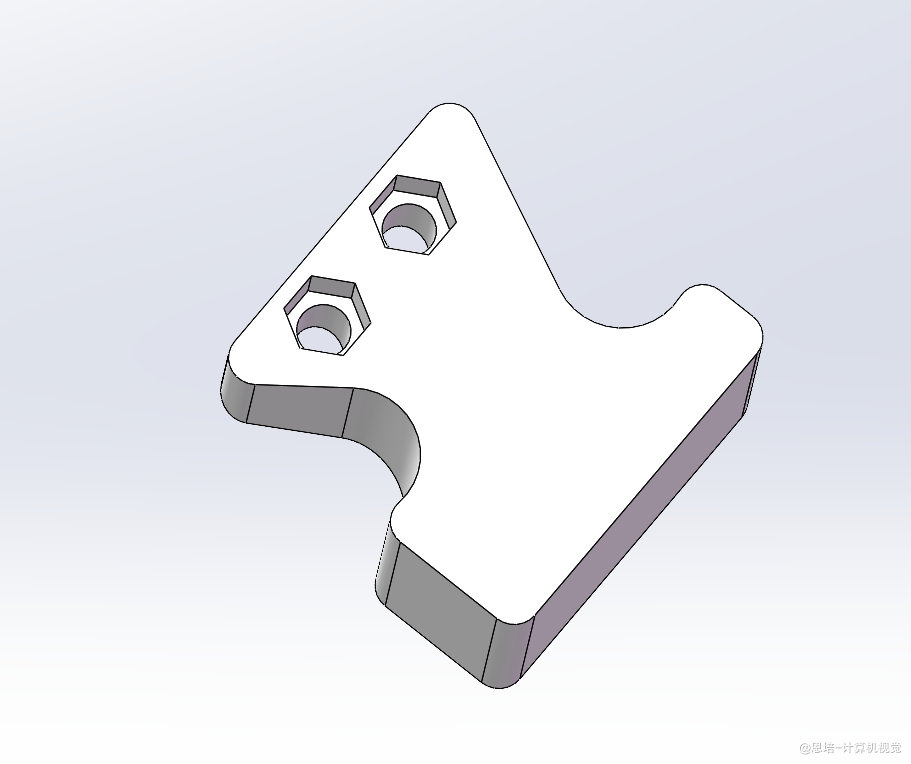 |
舵机安装辅助 | 3D 打印 | 1 |
3. 组装步骤
3.1 必备知识
-
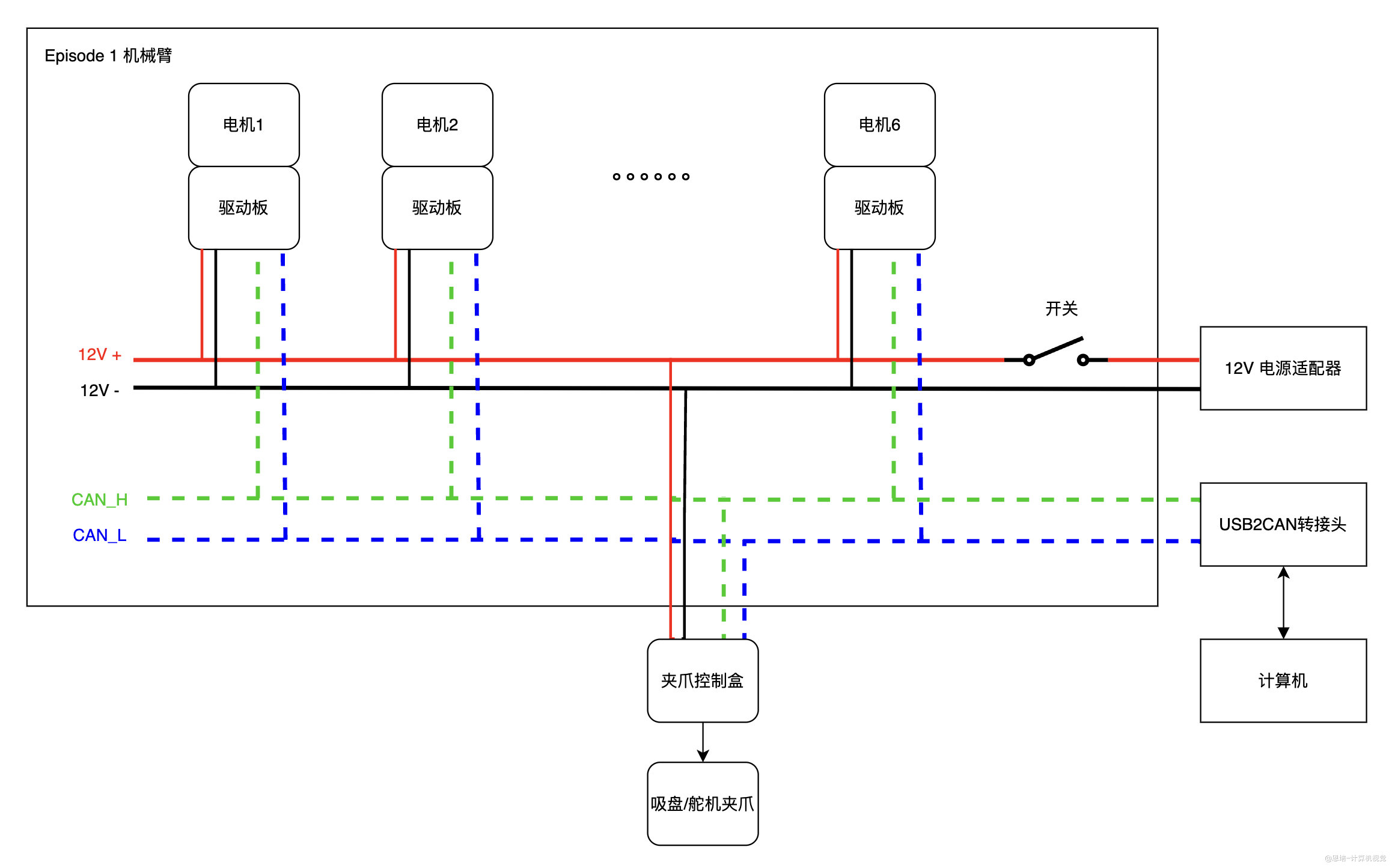
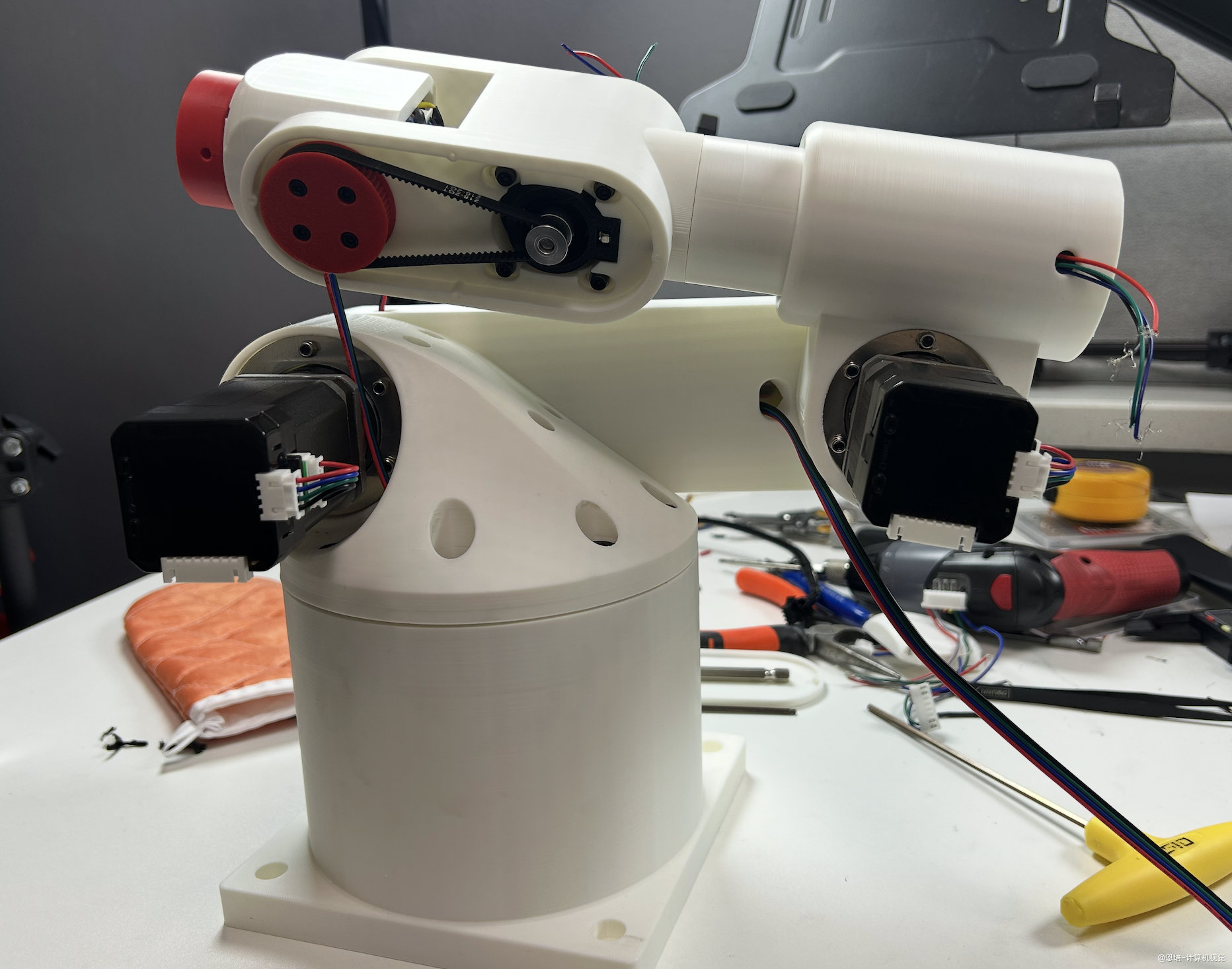
如下图:
- 机械臂 6 个关节,一共 6 台步进电机,其中第 1~4 个关节还配备有行星减速器
- 贯穿整个机械臂的一共有 4 条线,2 条是电源线,2 条是 CAN 通讯总线
- 6 个电机的驱动板分别与这 4 根线相连
- 夹爪控制盒也与这四根线相连
- 电源由 12V 电源适配器提供
- 控制信号(CAN 信号)由计算机经过 USB2CAN 转换头发送给各个电机、夹爪控制盒
-
我们选用的是 42 步进电机,行星减速器,如下图:
- 42 表示电机的长宽是 42mm
- L60、L48 等,表示电机的长度,如 L60 表示电机长 60mm
- 20:1、25:1 等,表示减速器的减速比例,如 20:1 表示电机每转动 20 圈,减速器输出轴刚好转动 1 圈
- 你可以测量或者通过电机、减速器标识来判断你手中拿的是哪个零件,你也可以按下列准则来快速判断
- 最长的是电机 L60/20:1
- 不带减速器的是电机 L40
- 减速器标识是 10:1 的是电机 L34/10:1
- 减速器标识是 25:1 的,较长的是电机 L48/25:1,较短的是电机 L34/25:1
零件编号 参考图片 名称 使用位置 数量 10038 电机 L60/20:1 第 2 个关节 1 10039 类似 10038 电机 L48/25:1 第 1 个关节 1 10040 电机 L40 第 5、6 个关节 2 10041 类似 10038 电机 L34/25:1 第 3 个关节 1 10042 类似 10038 电机 L34/10:1 第 4 个关节 1 -
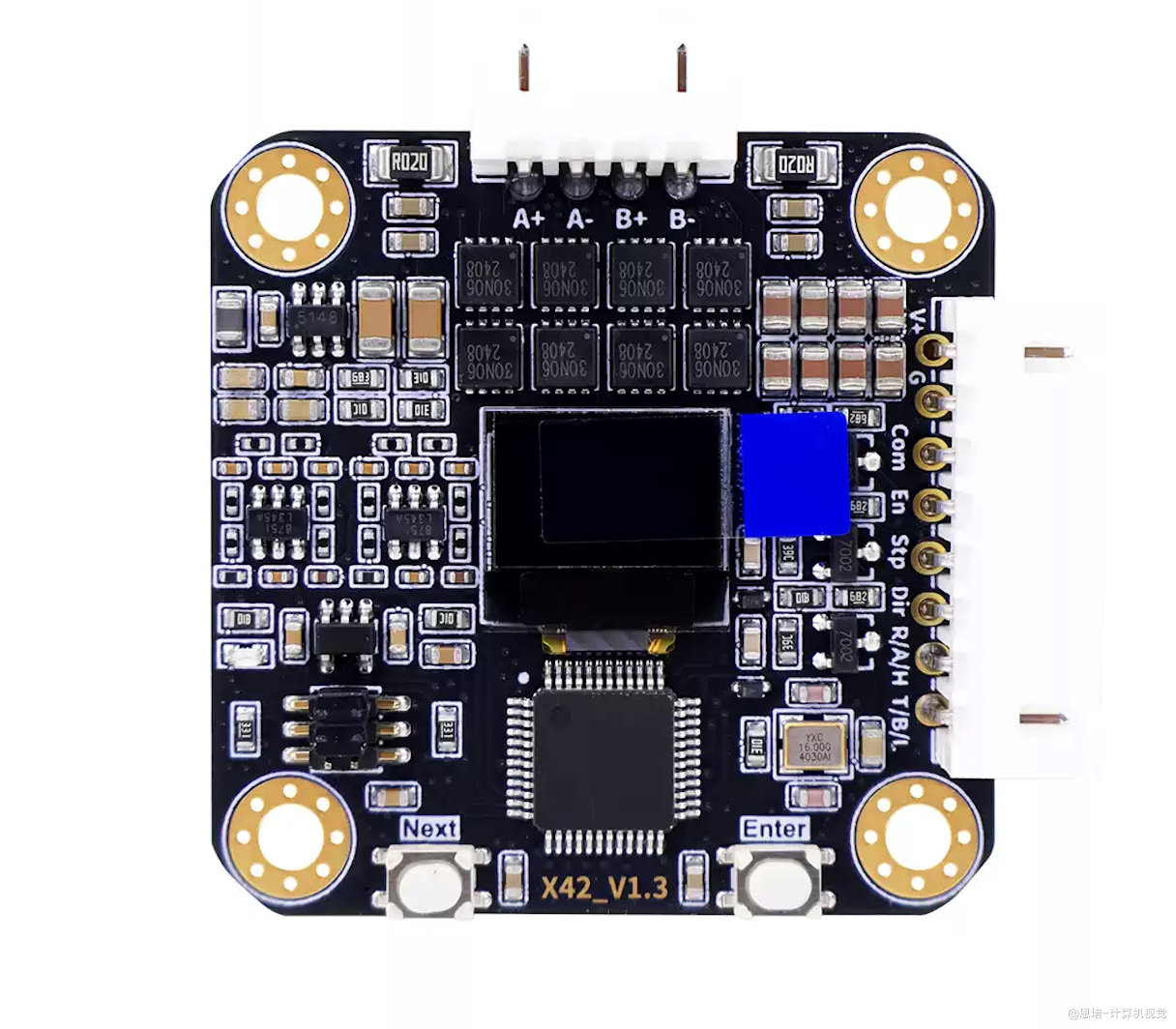
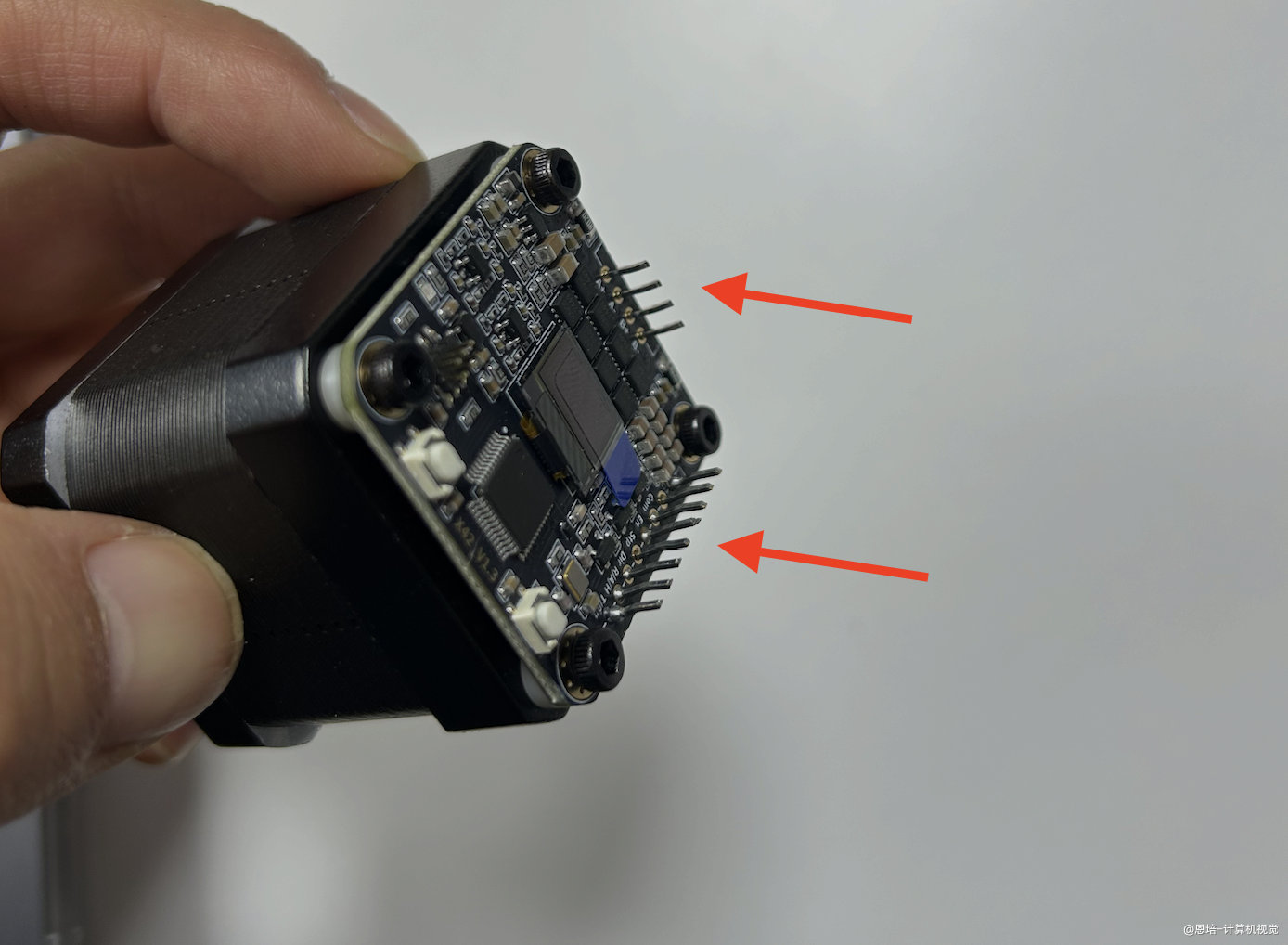
为了闭环控制步进电机,我选用的紧凑的张大头闭环驱动板(商品链接),如下图
-
机械臂启动的时候需要角度归零,在机械结构上我设计了归零碰撞阻挡,安装时需要注意不要磕碰掉这些阻挡,安装完也不要强制转动,否则破坏后无法正常使用机械臂(无法回零,线圈缠绕短路),尤其以下位置需要注意:
位置 图示 固定底座 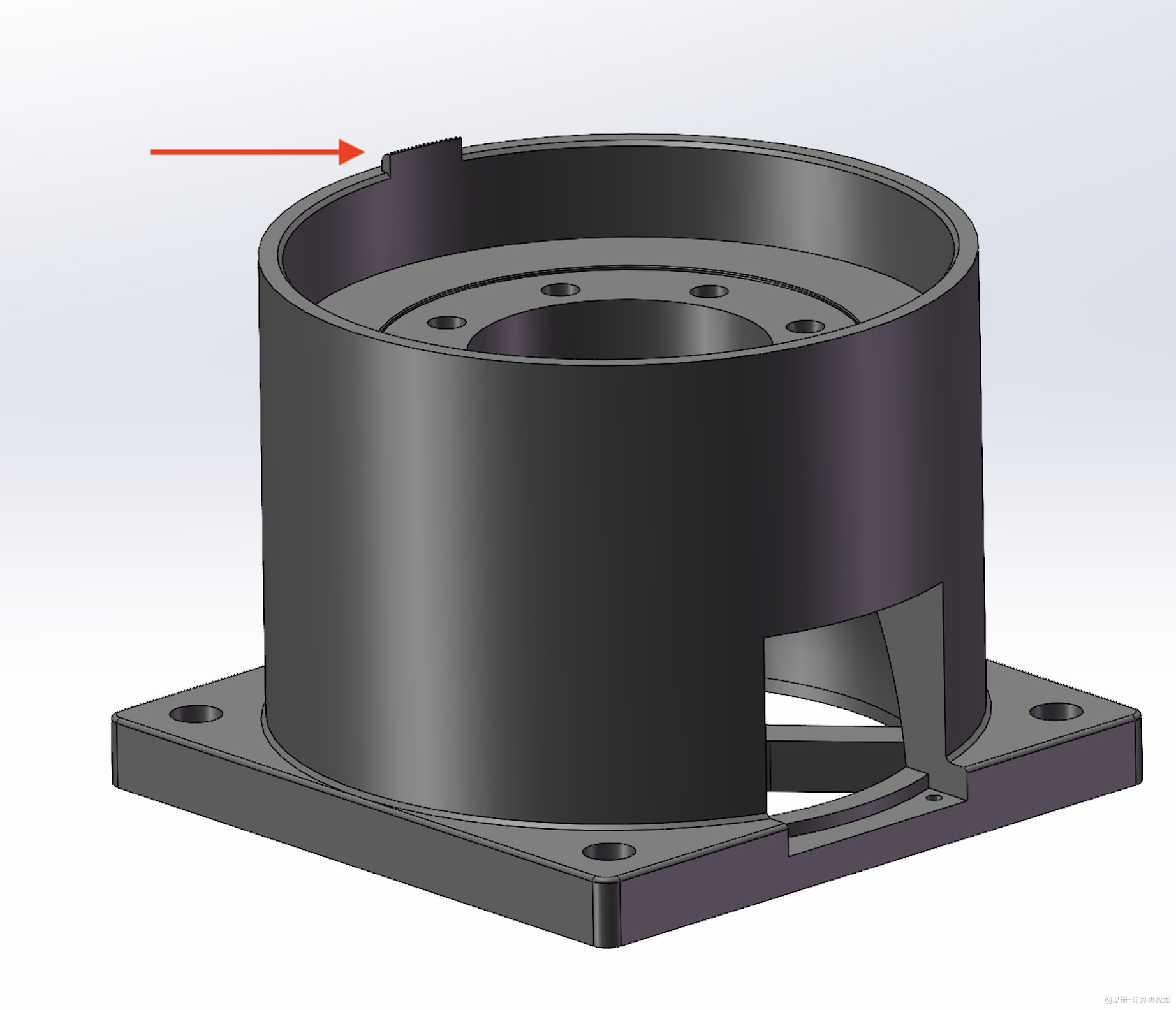
小臂旋转 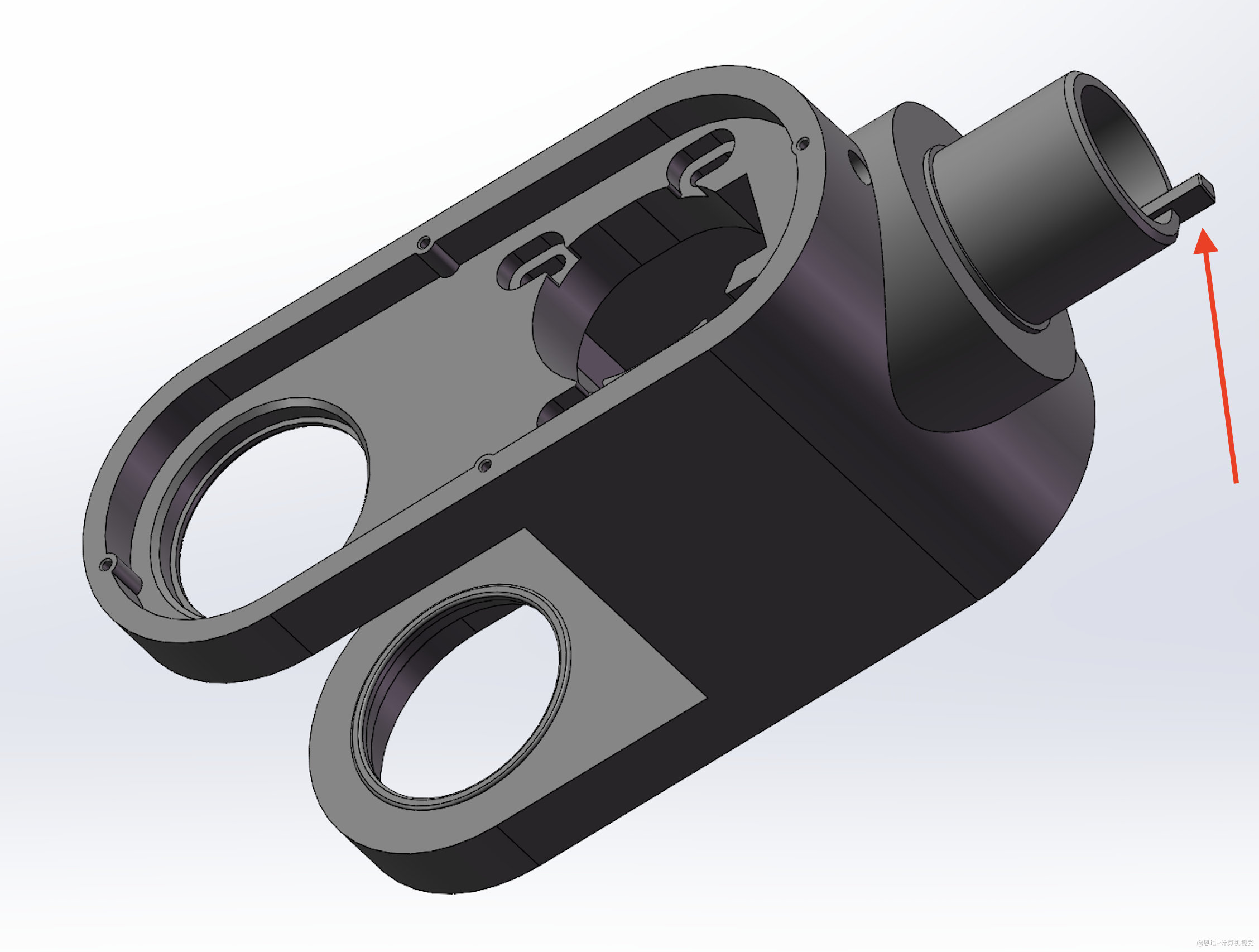
3.2 安装电机尾部磁铁、安装键
找出以下零件备用:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10011 | |
胶水 | 1 |
| 10077 | |
磁铁 | 6 |
| 10038 | |
电机 L60/20:1 | 1 |
| 10039 | / | 电机 L48/25:1 | 1 |
| 10040 | / | 电机 L40 | 2 |
| 10041 | / | 电机 L34/25:1 | 1 |
| 10042 | / | 电机 L34/10:1 | 1 |
| 10068 | |
3x3x14 键 | 4 |
安装步骤:
-
按照视频,将 3x3x14 键(10068)安装到电机减速器输出轴的键槽中。安装时务必压平、压紧、压正,否则法兰可能无法顺利装入(法兰与键槽为紧密配合)。效果如下图:
- 需要安装键的电机共 4 台:电机 L60/20:1、电机 L48/25:1、电机 L34/25:1、电机 L34/10:1
- 每装完一个,用键槽法兰(10002)试装验证能否顺利套入
- 若装入困难,可用尖锐的螺丝刀等清理法兰键槽内的铁屑等杂物
- 也可在键槽处涂少量润滑油,降低装配阻力
-
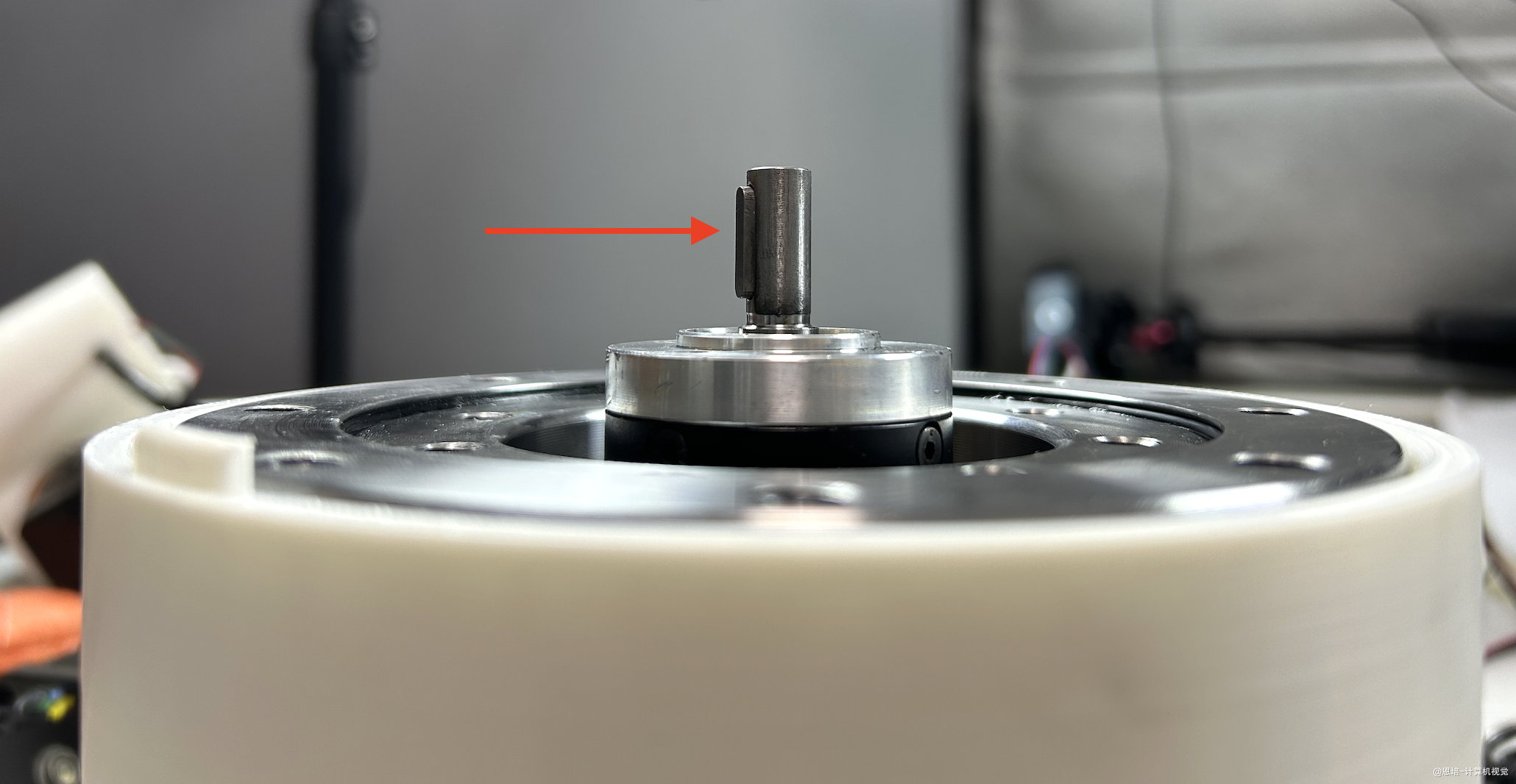
如下图,步进电机出厂时尾部输出轴不含磁铁(图左)。我们需要在尾部输出轴端面正中心粘贴一个圆柱磁铁,供闭环驱动板检测电机转角与转速。按照视频教程,为电机逐一安装磁铁。
- 居中 & 贴平:磁铁须尽量对准电机轴中心(避免偏心),且水平贴紧轴端面;偏心或倾斜会影响检测精度,严重时驱动板将无法识别
- 第 5、6 号电机出厂时已预装磁铁。
- 胶水用量宜少:仅需薄薄一层,能固定磁铁即可;胶水过多可能渗入电机内部,造成损坏
- 胶水需至少静置 10 分钟待其固化,完全干透后方可进行后续操作
- 若磁铁脱落需重装,应先彻底清除轴端面残留的旧胶水,再重新粘贴

3.3 电机安装驱动板、校准、测试
电机安装完磁铁,现在需要安装电机驱动板,并对电机进行初始化校准。
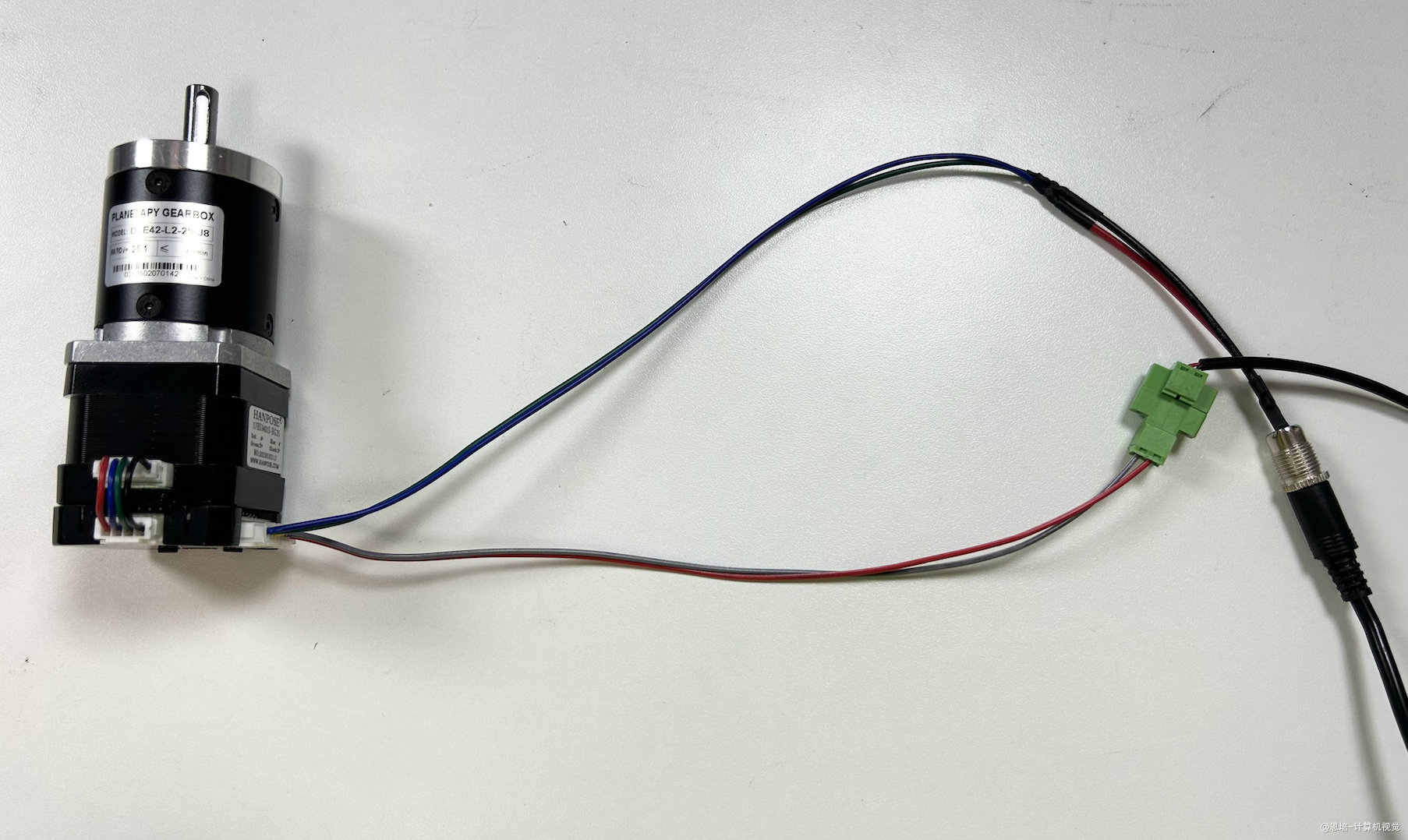
3.3.1 制作电源、CAN 测试线
- 找出下列零件,先做一个电源测试线
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10066 | |
DC 12V 插座 | 1 |
| 10073 | |
12V 电源 | 1 |
| 10001 | |
电机驱动 | 1 |
| 10071 | |
2 芯软线 | 1.5 |
| 10036 | |
USB2CAN 转换器 | 1 |
| 10072 | |
2P 排插 | 1 |
| 10079 | |
驱动-8P 通讯线 | 1 |
| 10083 | |
热缩管 | 0.6m |
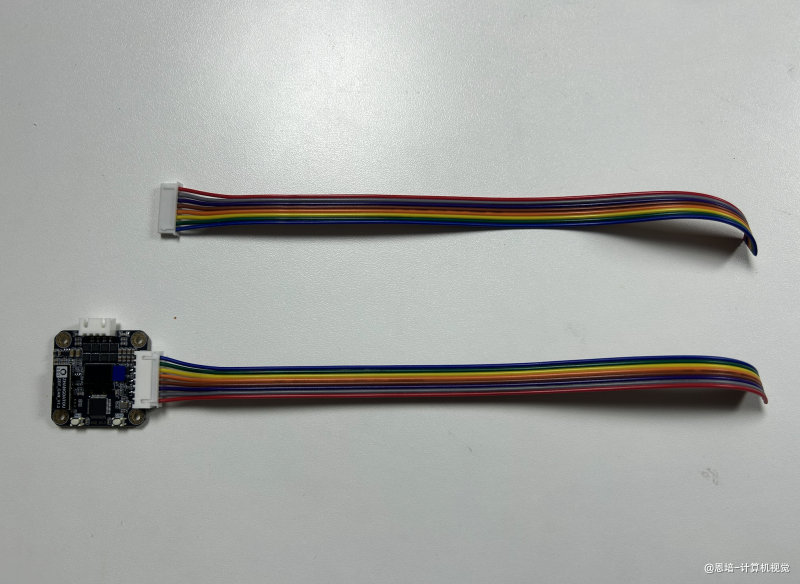
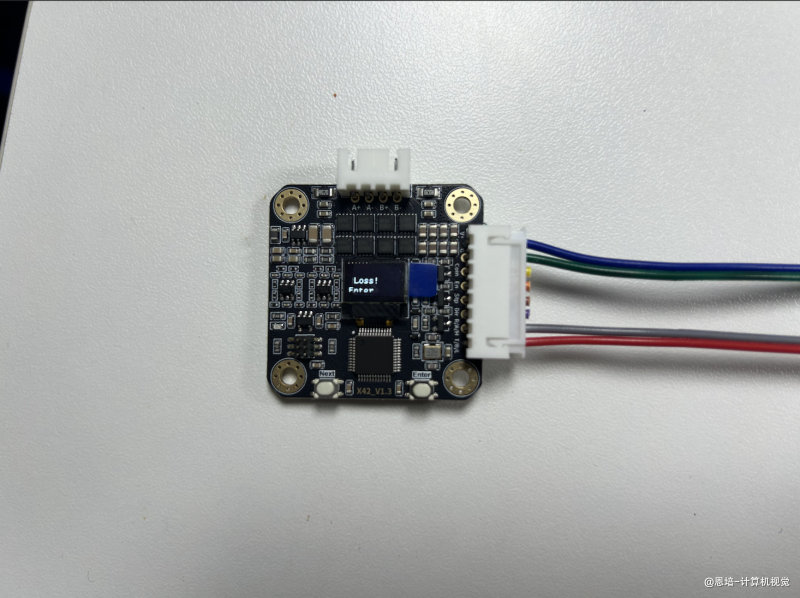
- 找到驱动配套的 8P 通讯排线,长这样:

-
将通讯线任意一头插在驱动板上:
我们需要判断通讯线线序:
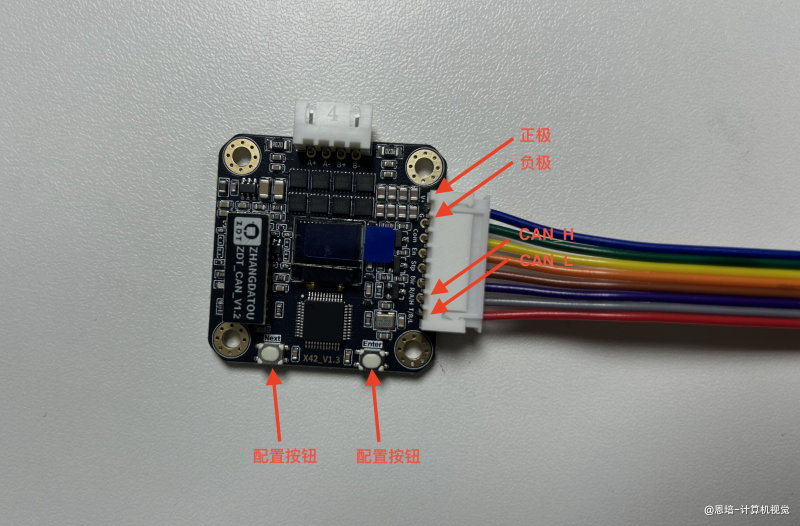
- 将板子正面朝上(带有屏幕、有配置按钮的一面)
- 右侧线序则为:
- 最上方两根分别是电源正负极
- 最下方两根分别是 CAN 通讯高 H、低 L 差分线
- 注意:
- 不能按颜色来判断(比如这里的红色并不是常规的正极)
- 不能判断错误,后面接线如果接错可能烧毁驱动板,或通讯无反应
自己接线时,建议把线色和功能统一固定成下面这套对应关系,整机保持一致,后续维护、换电机、排错时一眼就能对上,不容易接反:
| 线色 | 功能 | 含义 |
|---|---|---|
| 🔴 红 | +12V | 电源正(正) |
| ⚫ 黑 | GND | 电源负(负) |
| 🟢 绿 | CAN_H | CAN 高(高) |
| 🔵 蓝 | CAN_L | CAN 低(低) |
即「红黑绿蓝 = 正负高低」。本机即严格按此约定装配。
⚠️ 但切记:套件原配线缆的颜色不一定遵循此约定(上方已说明,原线红色未必是正极)。接到驱动板那一侧时,仍必须以驱动板正面丝印的针脚顺序核对,自定义线色只用于你自己重新走线的部分,别仅凭颜色下结论,接反会烧板。
-
将通讯线对折剪断
-
去除中间四根线
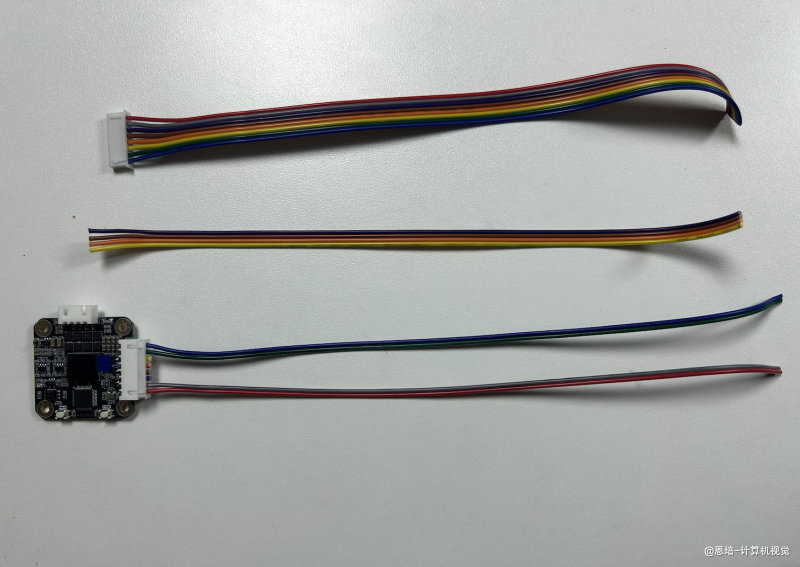
-
正负极分别连接 DC 12V 插座正负极(红色为正),使用热缩管封住,插上电源适配器,驱动板屏幕应该会点亮:

-
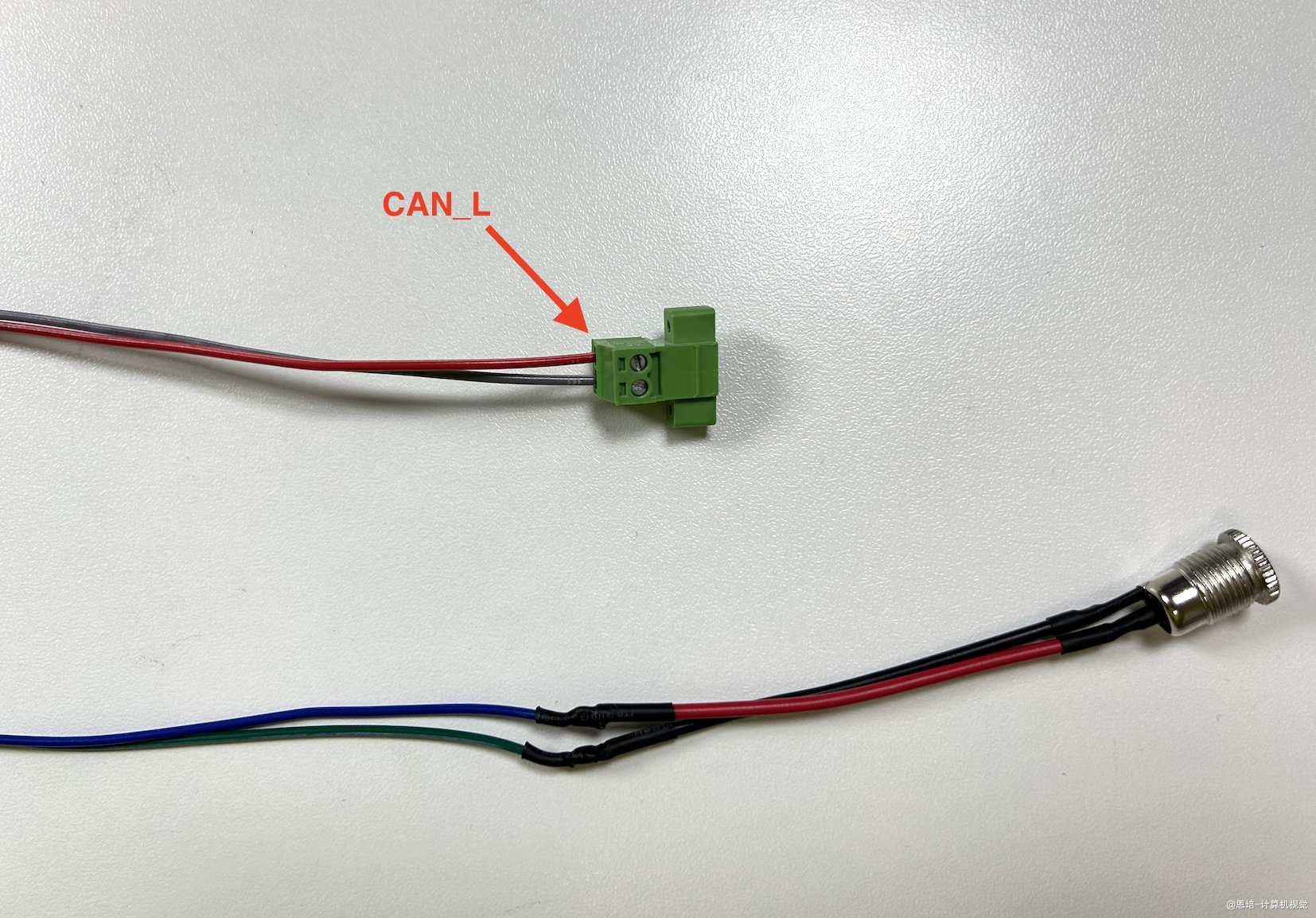
将 8P 信号线的 CAN_L 和 CAN_H 与 2P 插头(10072)相连
- 2P 插头有一对,一个带孔,一个不带,这里用的是带孔的母头
- 从 2P 插头螺丝面方向看,上面针脚作为 CAN_L,连接 8P 信号线 CAN_L
-
将 2 芯软线(10071)与 2P 插头(10072)、USB2CAN 转换器(10036)相连
- 这里用的是不带孔的 2P 插头公头
- 2 芯软线红色连接 CAN_H、黑色连接 CAN_L。
- 从 2P 插头螺丝面方向看,上面针脚作为 CAN_H,连接红线。
- 将 USB2CAN 转换器拨到 120R 档位

- 这里用的是不带孔的 2P 插头公头
3.3.2 安装驱动板、校准、测试
3.3.2.1 第 2 个关节
我们先拿最长的电机安装,准备下列零件:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10090 |  |
3x7x3 垫片 | 4 |
| 10056 | |
螺钉 M3×60 | 4 |
| 10001 | |
电机驱动 | 1 |
| 10038 | |
电机 L60/20:1 | 1 |
| 10079 | |
驱动-8P 通讯线 | 0.5 |
| 10080 | 同上 | 驱动-4P 电机线 | 1 |
| 10081 | 同上 | 驱动-注塑外壳 | 1 |
-
按照视频教程安装好驱动板,安装后的效果图如下:
拆除原来的螺丝,一定需要注意,不能打滑,否则可能退不出来。

-
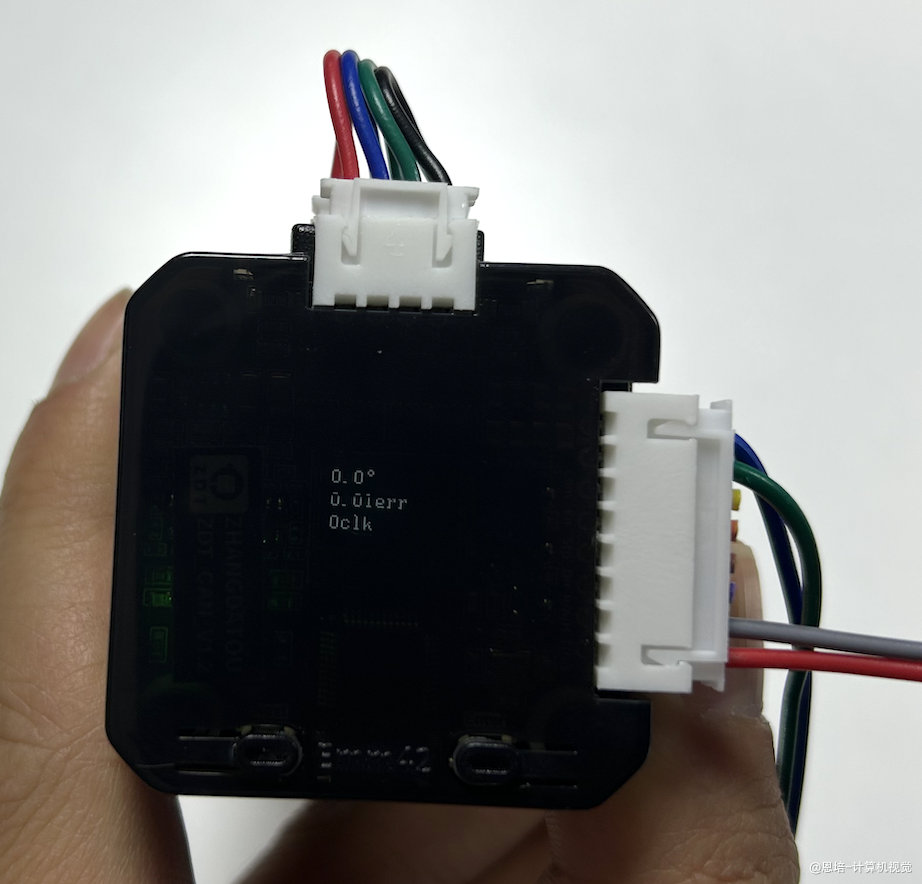
插上电源测试线,按照视频教程校准,校准完成后的屏幕文字会变成旋转角度:
左键短按切换菜单、长按回到主菜单;右键短按确认。
如果校准项出现多个,选择 CAL_NHS。
校准的时候,电机会正反方向各旋转几周,因为有减速器的缘故,可能看不出来,耐心等待即可。
校准前 校准后 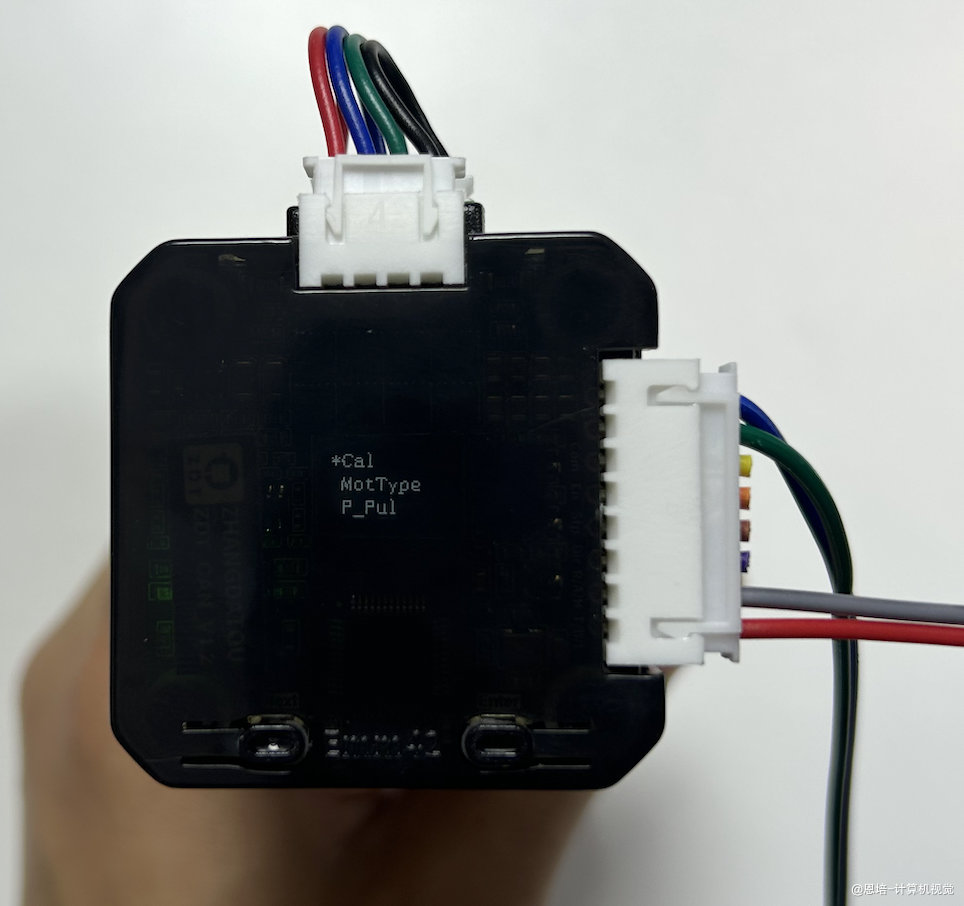
-
按照视频修改驱动板参数:
P_serial调节为CAN1_MAP(只修改这一处)。 -
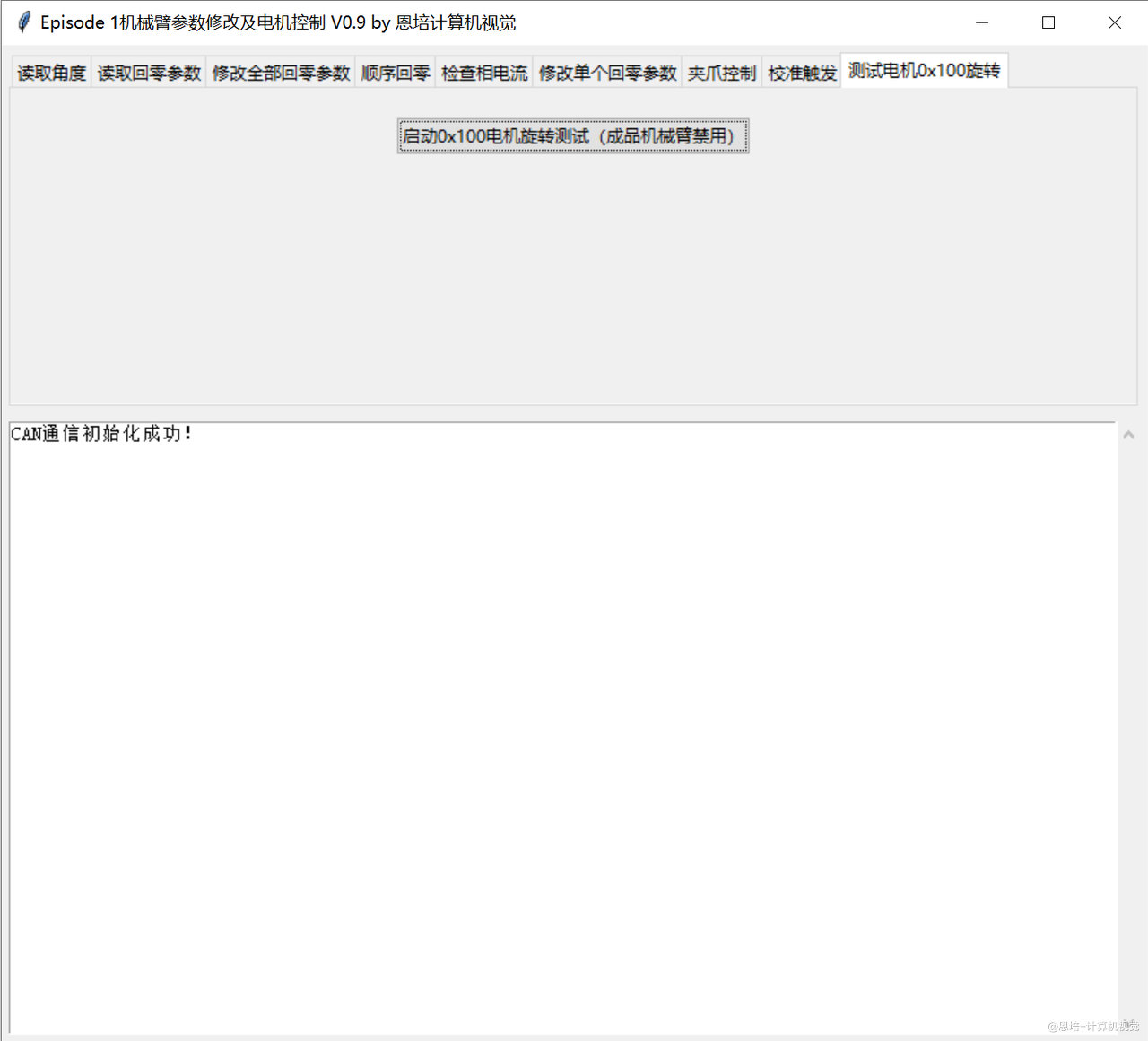
安装电脑驱动,按照视频测试旋转是否正常
- 启动 Windows 电脑(win10 或以上)
- 前往 Episode1 资料下载中心下载安装 USB2CAN 驱动
- 将 USB2CAN 转换器插入电脑 USB 接口
- 将 2P 插头公母座对接
在 Episode1 资料下载中心下载校准软件,点击“测试电机 0x100 旋转” 测试一下电机是否:
- 先顺时针旋转
- 10 秒后逆时针旋转
- 停止
3.3.2.2 第 1 个关节
准备下列零件,参考视频教程组装,然后参考第 2 个关节校准、旋转测试:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10090 | |
3x7x3 垫片 | 4 |
| 10092 | |
螺钉 M3×48 | 4 |
| 10001 | |
电机驱动 | 1 |
| 10039 | |
电机 L48/25:1 | 1 |
| 10079 | |
驱动-8P 通讯线 | 0.5 |
| 10080 | 同上 | 驱动-4P 电机线 | 1 |
| 10081 | 同上 | 驱动-注塑外壳 | 1 |
3.3.2.3 第 3 个关节
准备下列零件,参考视频教程组装,然后参考第 2 个关节校准、旋转测试:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10090 | |
3x7x3 垫片 | 4 |
| 10059 | |
螺钉 M3×35 | 4 |
| 10001 | |
电机驱动 | 1 |
| 10041 | |
电机 L34/25:1 | 1 |
| 10079 | |
驱动-8P 通讯线 | 0.5 |
| 10080 | 同上 | 驱动-4P 电机线 | 1 |
| 10081 | 同上 | 驱动-注塑外壳 | 1 |
3.3.2.4 第 4 个关节
准备下列零件:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10090 | |
3x7x3 垫片 | 4 |
| 10059 | |
螺钉 M3×35 | 4 |
| 10001 | |
电机驱动 | 1 |
| 10042 | |
电机 L34/10:1 | 1 |
| 10079 | |
驱动-8P 通讯线 | 0.5 |
| 10080 | 同上 | 驱动-4P 电机线 | 1 |
-
参考视频将驱动板组装好,参考第 2 个关节校准、旋转测试。
- 这里不需要安装驱动-注塑外壳(10081)。
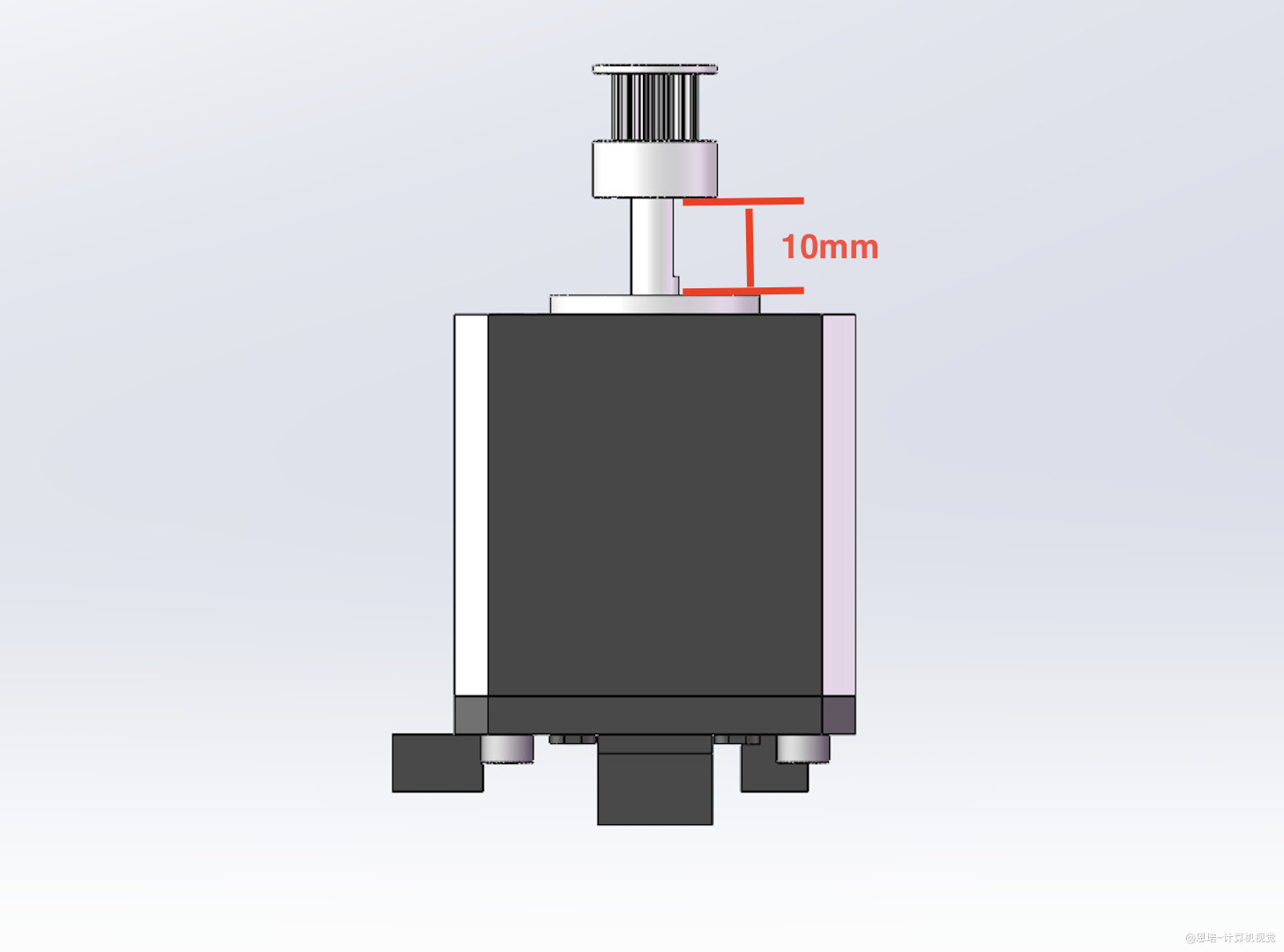
3.3.2.5 第 5 个关节
准备下列零件,参考视频教程组装
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10090 | |
3x7x3 垫片 | 4 |
| 10058 | |
螺钉 M3×40 | 4 |
| 10001 | |
电机驱动 | 1 |
| 10040 | |
电机 L40 | 1 |
| 10047 | |
J5 15 齿同步轮 | 1 |
| 10079 | |
驱动-8P 通讯线 | 0.5 |
| 10080 | 同上 | 驱动-4P 电机线 | 1 |
| 10083 | |
热缩管 | 0.6 |
- 安装同步轮,参考下图控制好距离
-
因为安装空间有限,我们需要用尖头钳拆除电机驱动板上连接电机线的排插口(排针留下):
尽量不要碰坏元器件,否则板子可能就废了(我也有惨痛教训)。
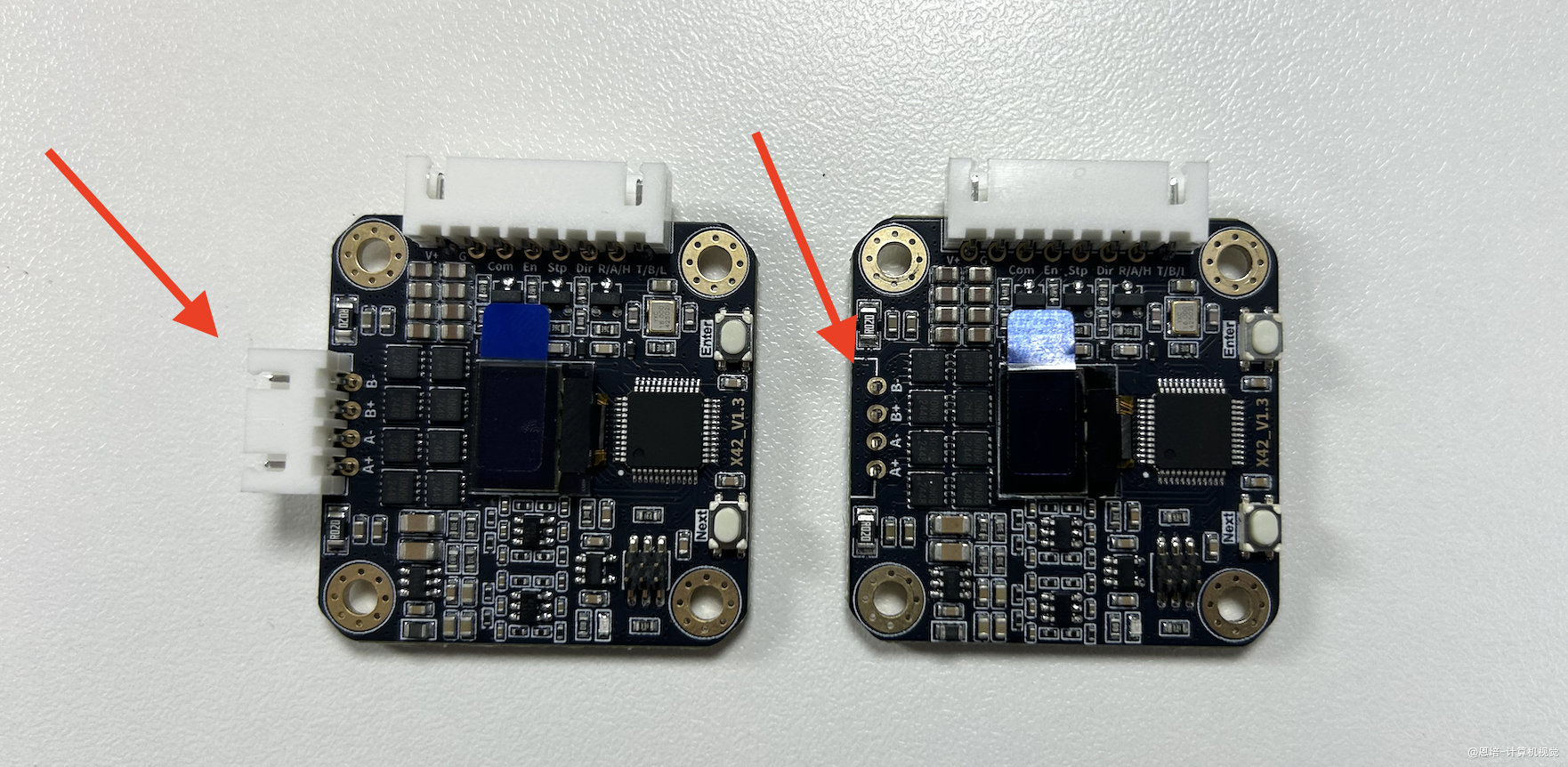
-
然后按照视频将四根引脚脚立起来:
注意操作需要缓慢,否则可能导致引脚松动、折断(o(╥﹏╥)o,有惨痛教训)。
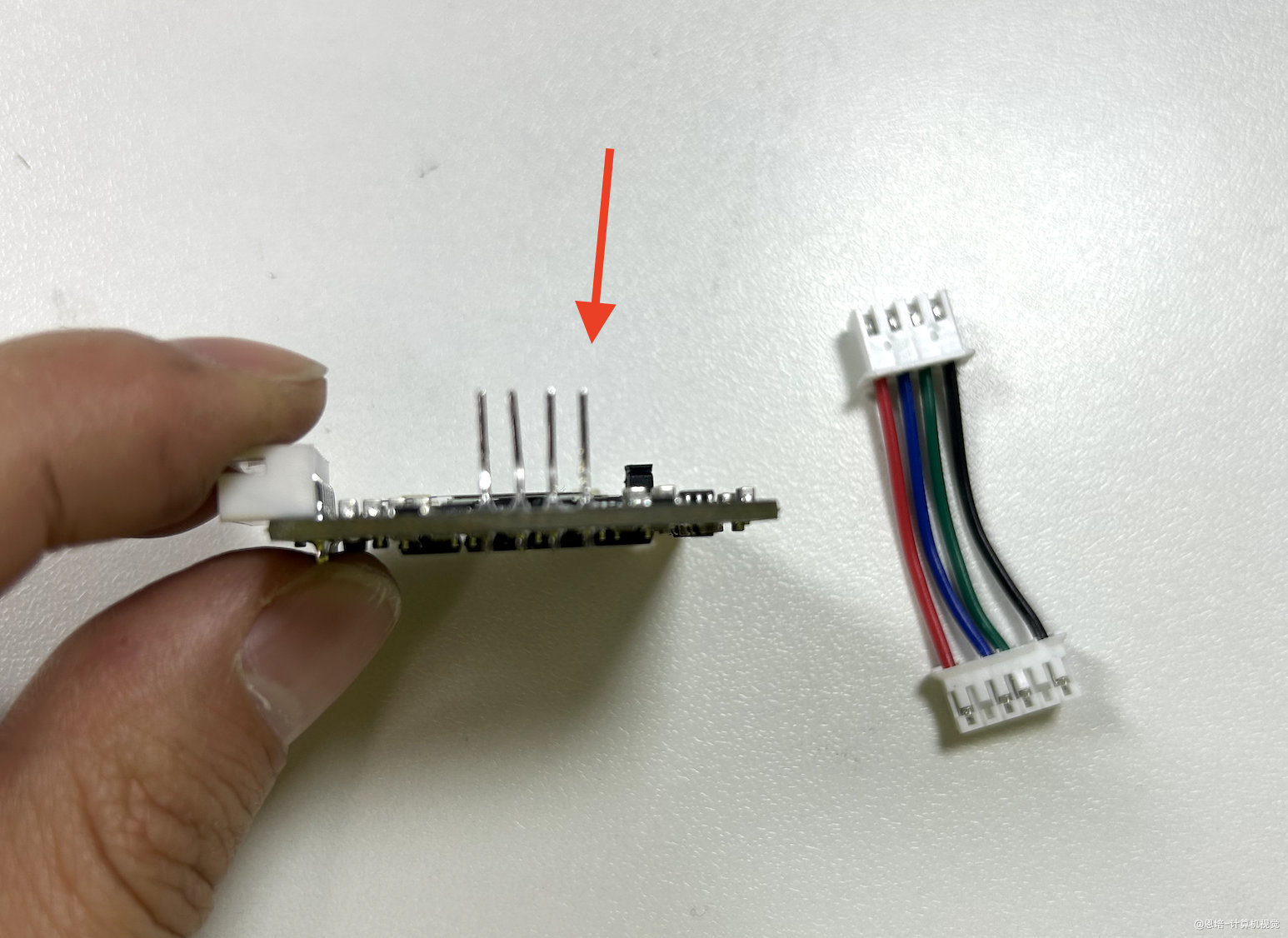
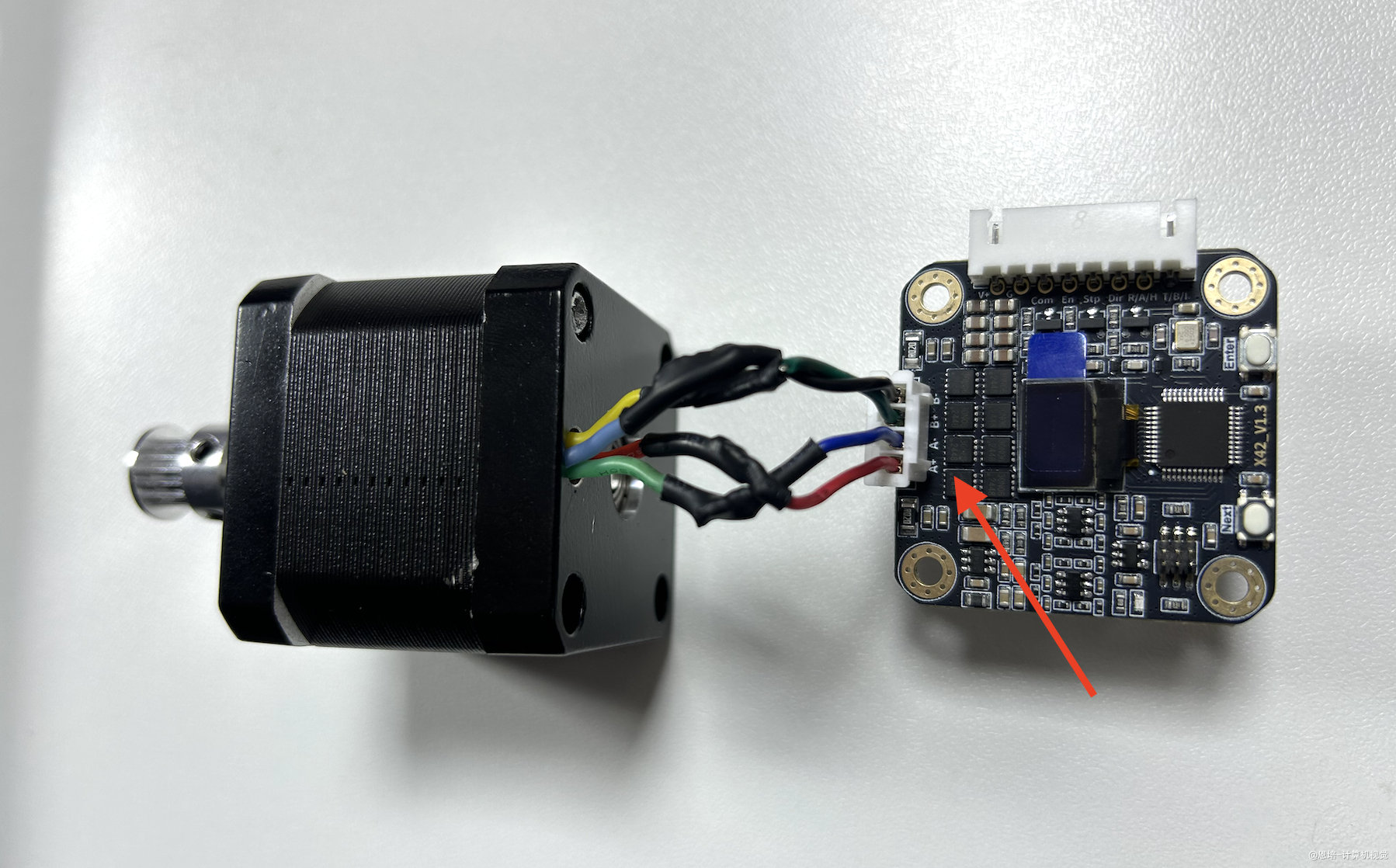
- 然后制作 4P 电机线,需要对应电机线的颜色和驱动板针脚,接错会无法正常使用电机(当然,我也错过),需要细心:
| 电机线序 | 驱动板线序 |
|---|---|
 |
 |
这是我的接线效果:
- 如果没有锡焊,用热缩管紧固即可(电流不大)
- 热缩管裁剪为 20mm 即可
-
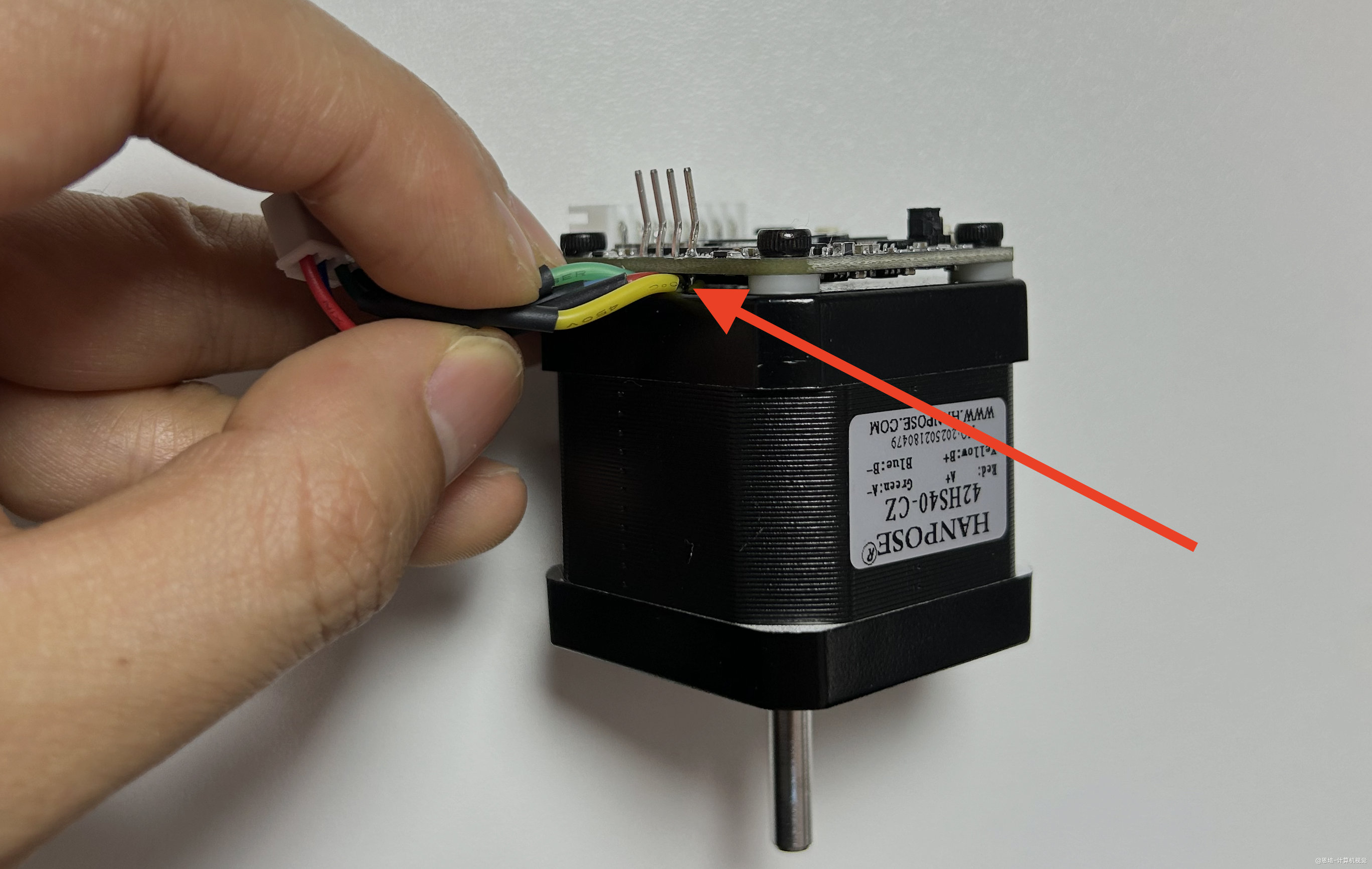
然后再参考视频将驱动板组装好,参考第 2 个关节校准、旋转测试。
注意!!!注意要防止驱动板后侧的针脚压破电机线,如下图中的黄线已经被压破,这样会造成短路,烧坏电机驱动板。
3.3.2.6 第 6 个关节
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10090 | |
3x7x3 垫片 | 4 |
| 10058 | |
螺钉 M3×40 | 4 |
| 10001 | |
电机驱动 | 1 |
| 10040 | |
电机 L40 | 1 |
| 10079 | |
驱动-8P 通讯线 | 0.5 |
| 10080 | 同上 | 驱动-4P 电机线 | 1 |
| 10083 | |
热缩管 | 0.6 |
- 类似第五个关节电机,因为安装空间有限,我们需要拆除电机驱动板 2 个排插口,操作流程类似,处理完的效果如下:
注意!!!这里的电机是后出线,注意要防止驱动板后侧的针脚压破电机线,如下图中的黄线已经被压破,这样会造成短路,烧坏电机驱动板。
- 然后再参考视频将驱动板组装好,参考第 2 个关节校准、测试速度。
3.4 安装大臂
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10028 | |
J3 大臂 | 1 |
| 10002 | |
键槽法兰 | 2 |
| 10027 | |
大臂铝板 | 1 |
| 10048 | |
紧定螺钉 M6×10 | 2 |
| 10053 | / | 螺钉 M5×16 | 8 |
-
大臂铝板发货的时候已经嵌入大臂。
-
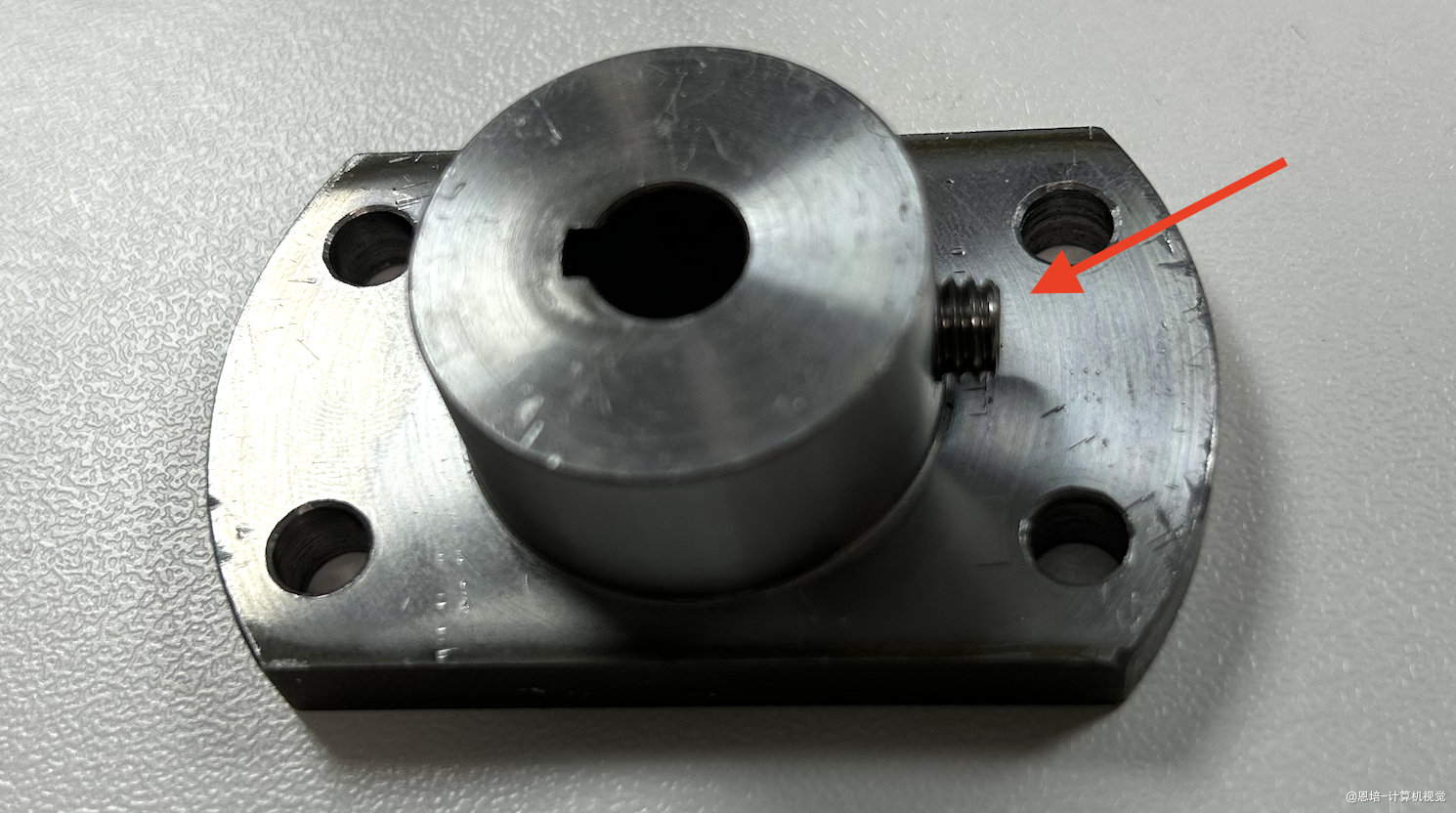
使用 3MM 扳手(10074)将 3 个紧定螺钉 M6×10(10048)分别旋入 3 个键槽法兰(10002),如下图:
-
按照视频教程,安装好 2 个键槽法兰:
注意紧定螺钉方向与大臂开口方向一致,否则后面扳手无法拧紧:
如果铝板的孔与大臂孔不对齐,用内六角扳手等手动微调一下。
3.5 安装固定底座
找出以下零件备用:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10054 | |
螺钉 M4×10 | 4 |
| 10031 | |
J1 固定底座 | 1 |
| 10049 | |
螺钉 M8×25 | 8 |
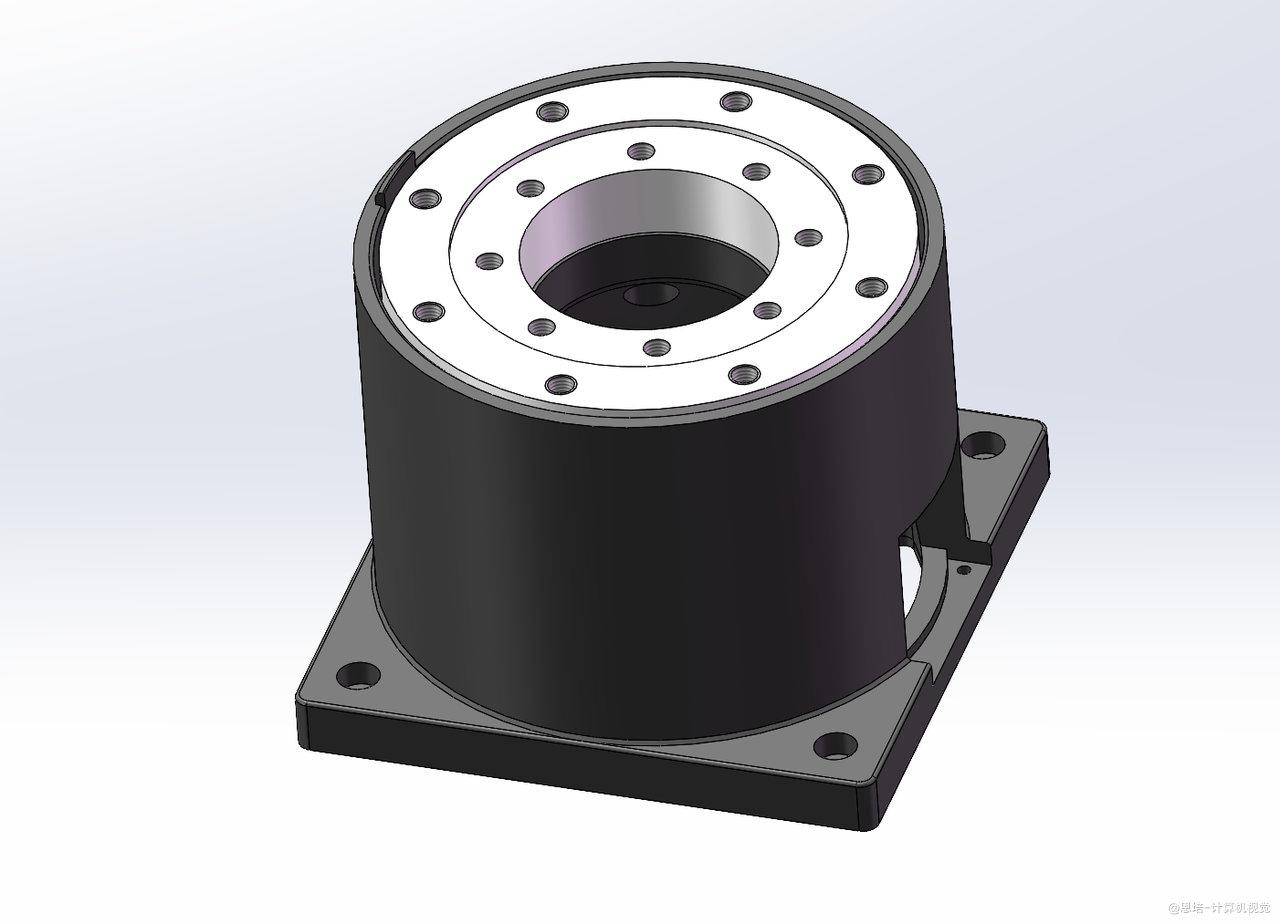
| 10032 | |
回转支承 | 1 |
| / | |
装好的第 1 个关节电机 | 1 |
- 按照视频清除固定底座(10031)螺丝孔残留支撑、杂物。
- 拿出回转支承(10032),清除 2 面杂物,转动几圈,感受阻力,待会装完对比阻力力度。
- 清除固定底座(10031)安装平面的杂物,将回转支承(10032)凸面放在上面,如下图。
-
固定 8 根螺钉 M8×25(10049),效果如下
- 先安装对角两个螺钉,不要拧到底,钻入轴承即可,固定轴承
- 再安装其他对角线螺丝,最后全部装完后再拧紧
- 一边压着轴承,一边紧固螺丝,不然一面可能顶起
- 安装完螺钉后,转动轴承外圈几圈,对比刚才的阻力力度,如果有明显卡顿,或者阻力变大,可能是平面有异物,或者哪里有翘曲,重新拆掉螺钉检查。
注意事项:
- 因为主体是 3D 打印塑料件,拧内六角螺钉的时候,不要太用力(尤其是用电动螺丝刀的时候),推荐最后拧紧阶段用手拧,否则可能会压坏,能固定住零件即可。
- 安装轴承的时候,底部平面要清除杂物,否则可能影响后面旋转。
3.6 安装腰关节
找出以下零件备用:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10009 | |
J2 腰关节 | 1 |
| 10049 | |
螺钉 M8×25 | 7 |
| 10002 | |
键槽法兰 | 1 |
| 10007 | |
腰关节铝片正面 | 1 |
| 10008 | |
腰关节铝片背面 | 1 |
| 10048 | |
紧定螺钉 M6×10 | 1 |
| 10058 | / | 螺钉 M3×40 | 6 |
| 10054 | / | 螺钉 M4×10 | 4 |
| 10065 | |
螺母 M3 | 6 |
| 10051 | / | 螺钉 M5×50 | 2 |
| 10052 | / | 螺钉 M5×25 | 2 |
| 10064 | 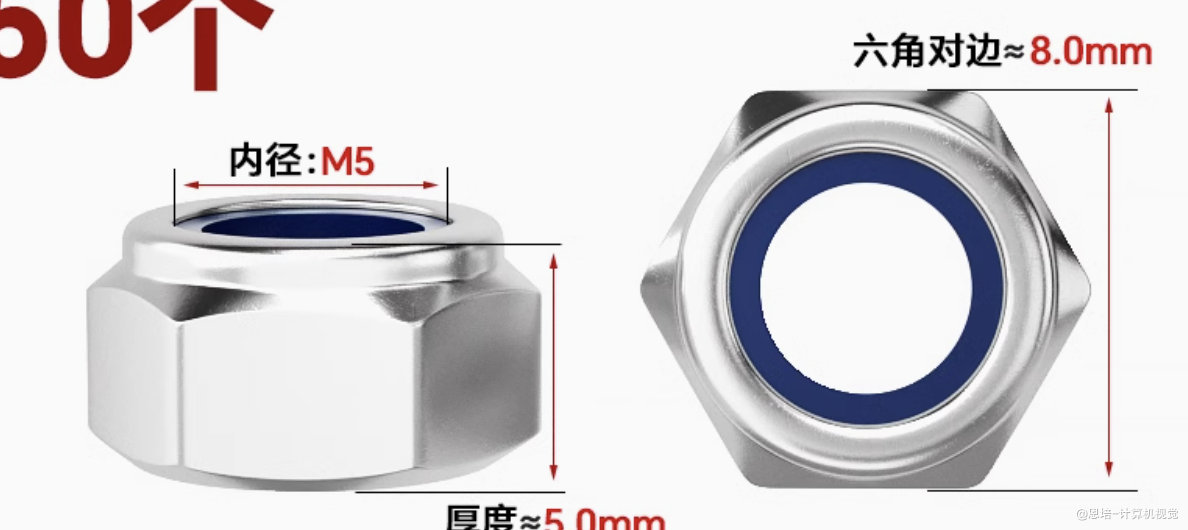 |
螺母 M5 | 4 |
| 10086 | |
长款电机配套 4P 线 | 1 |
| / | |
安装好的第 2 个电机 | 1 |
-
拿出剩下的一个装有紧定螺钉的键槽法兰
-
对准键槽,将键槽法兰嵌入减速器输出轴,如下图:
- 先清理键槽夹角
- 再润滑点液体油

-
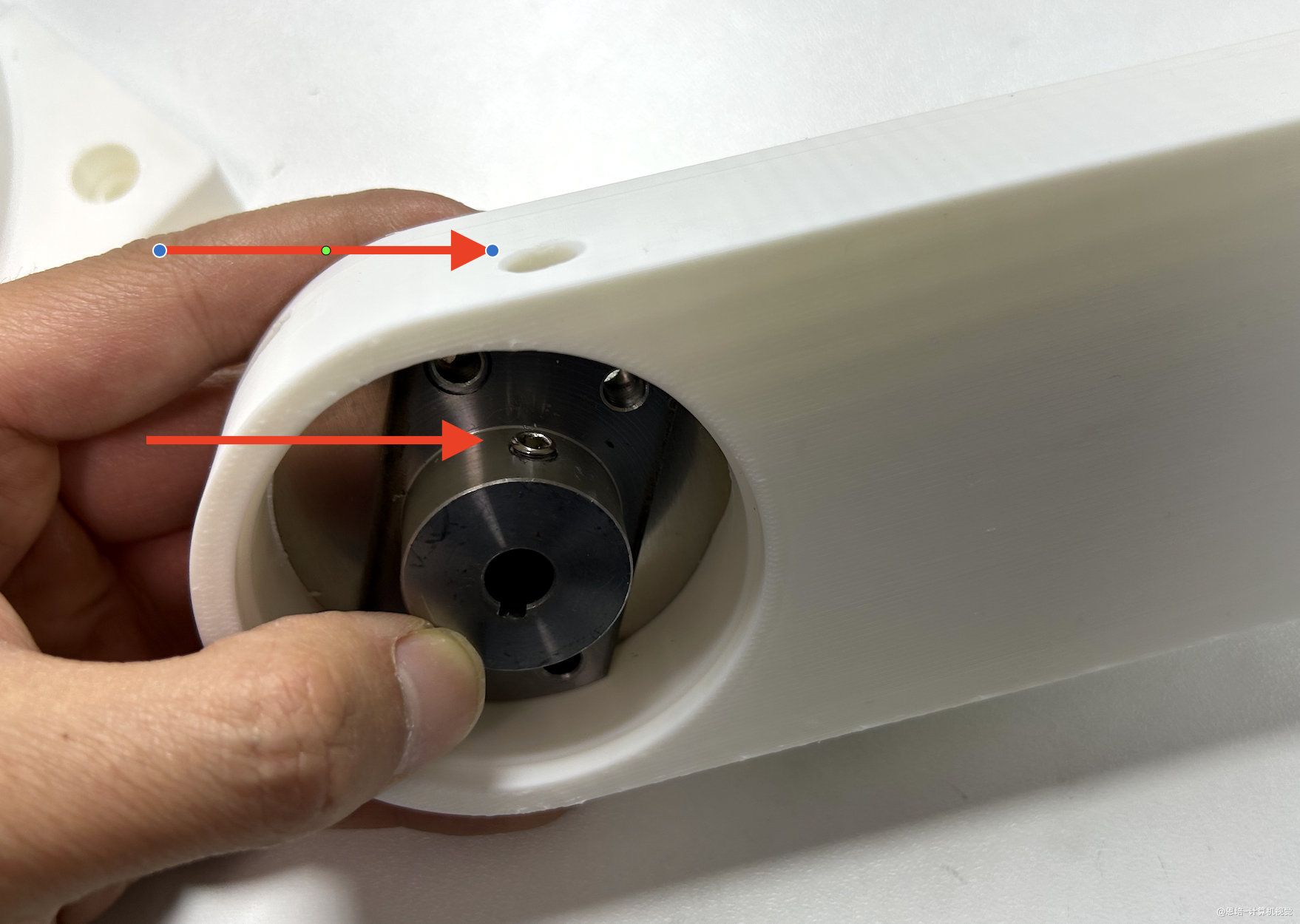
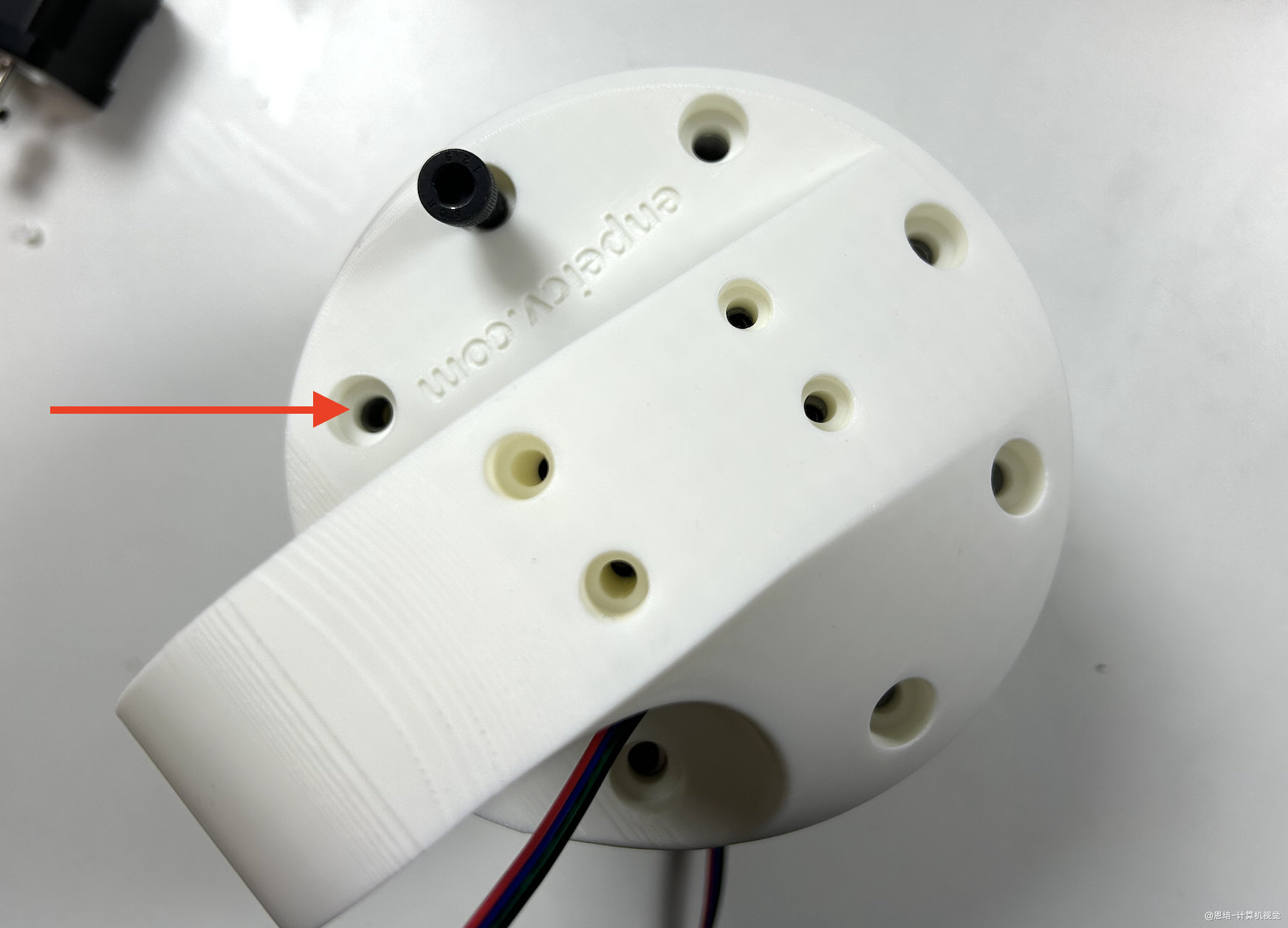
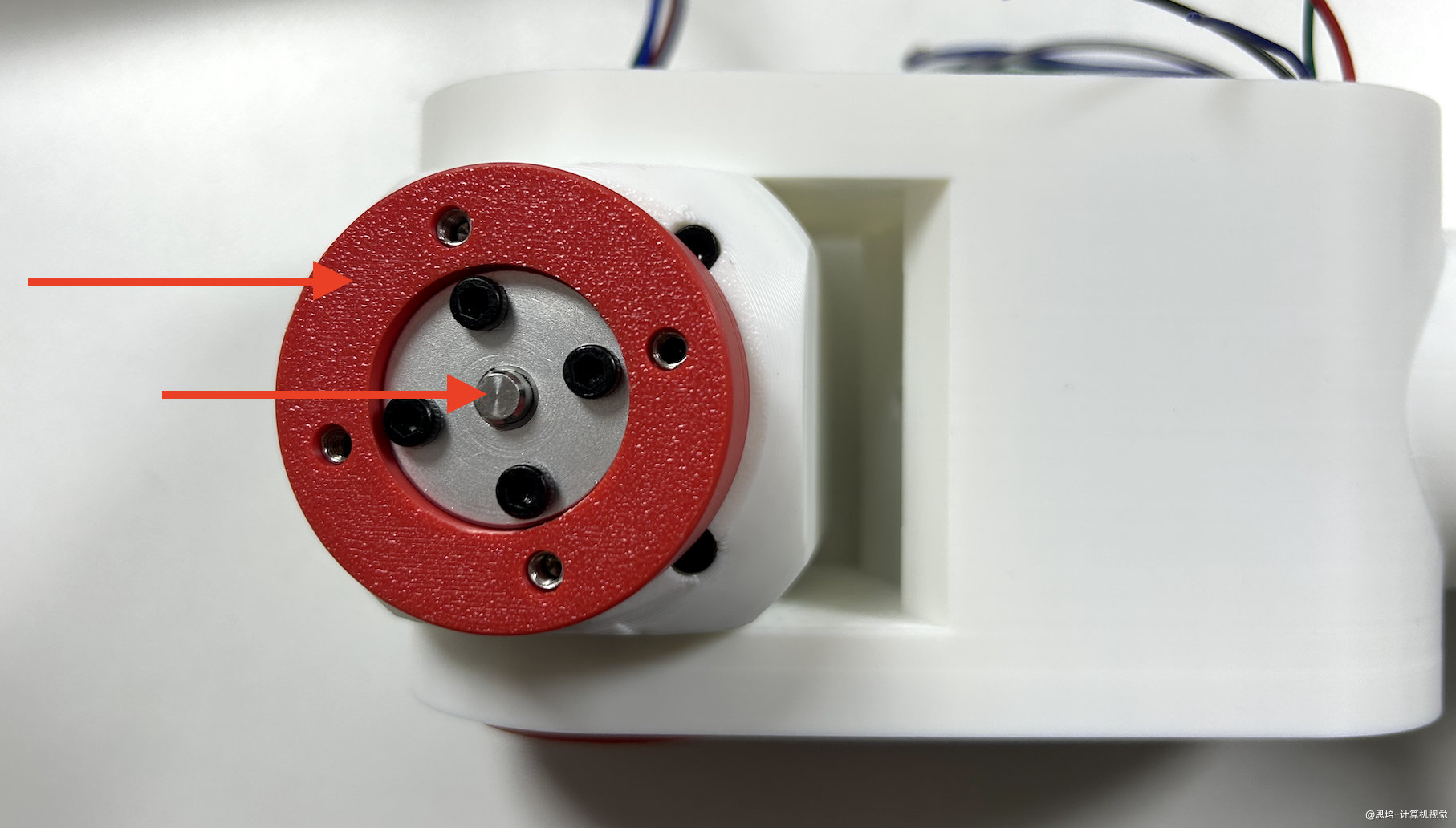
拿出长款电机配套 4P 线(10086),剪去两端段子,使用卷尺和剪刀裁剪出 35cm 线,然后按照视频穿过固定底座和腰关节,如下图:
如图中左侧红色箭头所指,仍然要注意腰关节预留的螺栓孔,要与键槽法兰紧定螺钉槽口方向一致,否则后面扳手无法拧紧。
如不确定,可以自己对着孔看一下,应该可以看到紧定螺钉,或者用扳手试一下,能不能拧紧。
剩余的线还要用,不要扔。

-
稍微旋转一下腰关节,让回转支承的孔与螺钉孔对齐,然后安装 7 颗螺钉 M8×25(10049),如下图:
逐个对角先放进螺钉,不要拧紧,占位对齐。
然后逐个安装对角螺钉,不断检查腰关节外围与底座外围是否共面、平齐。
腰关节为塑料,不能太用力拧螺钉,否则某个方向会翘曲严重,需要边观察边拧紧。
-
然后紧固螺钉 M5×50(10051)、螺钉 M5×25(10052)
这两个螺钉是固定腰关节与键槽法兰,紧固螺钉的时候,会将下方法兰拉紧。
长螺钉在上,短螺钉在下。
安装顺序:逐个对角安装。
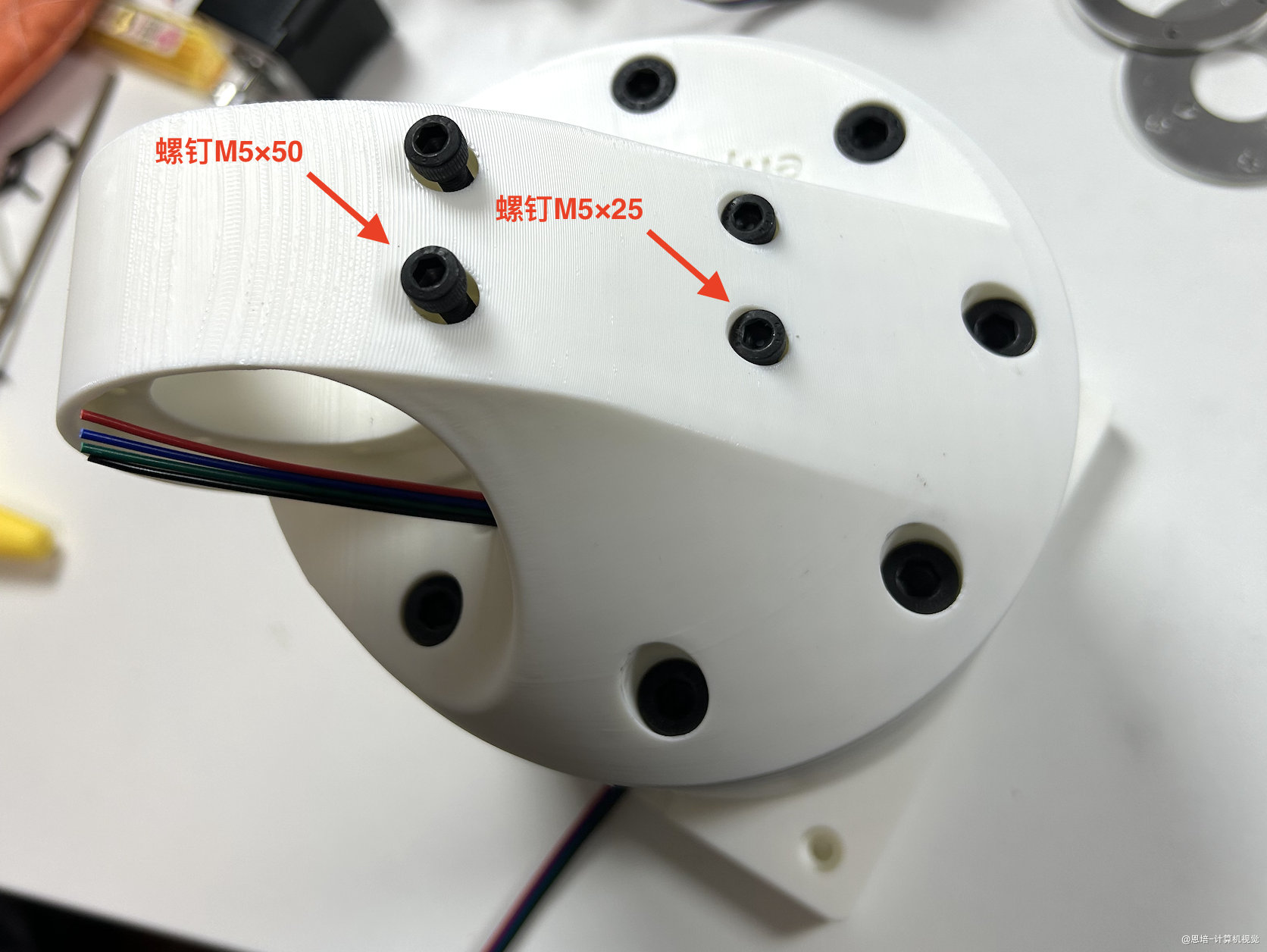
-
沿着腰关节预留的螺栓孔紧固紧定螺钉。
-
安装腰关节铝片正面(10007)、腰关节铝片背面(10008),需要用 6 根螺钉 M3×40(10058),以及 6 个螺母 M3(10065)。
注意:如图,这两个铝片的孔要在正上方(四个孔在一条竖线上)。
如果腰关节螺钉孔内有残留支撑,先用螺钉打通。
安装顺序:逐个对角安装。
这里需要尽量拧紧,可以一边用尖嘴钳夹住螺母,一边拧紧。
这里都是金属,可以多用点力。
-
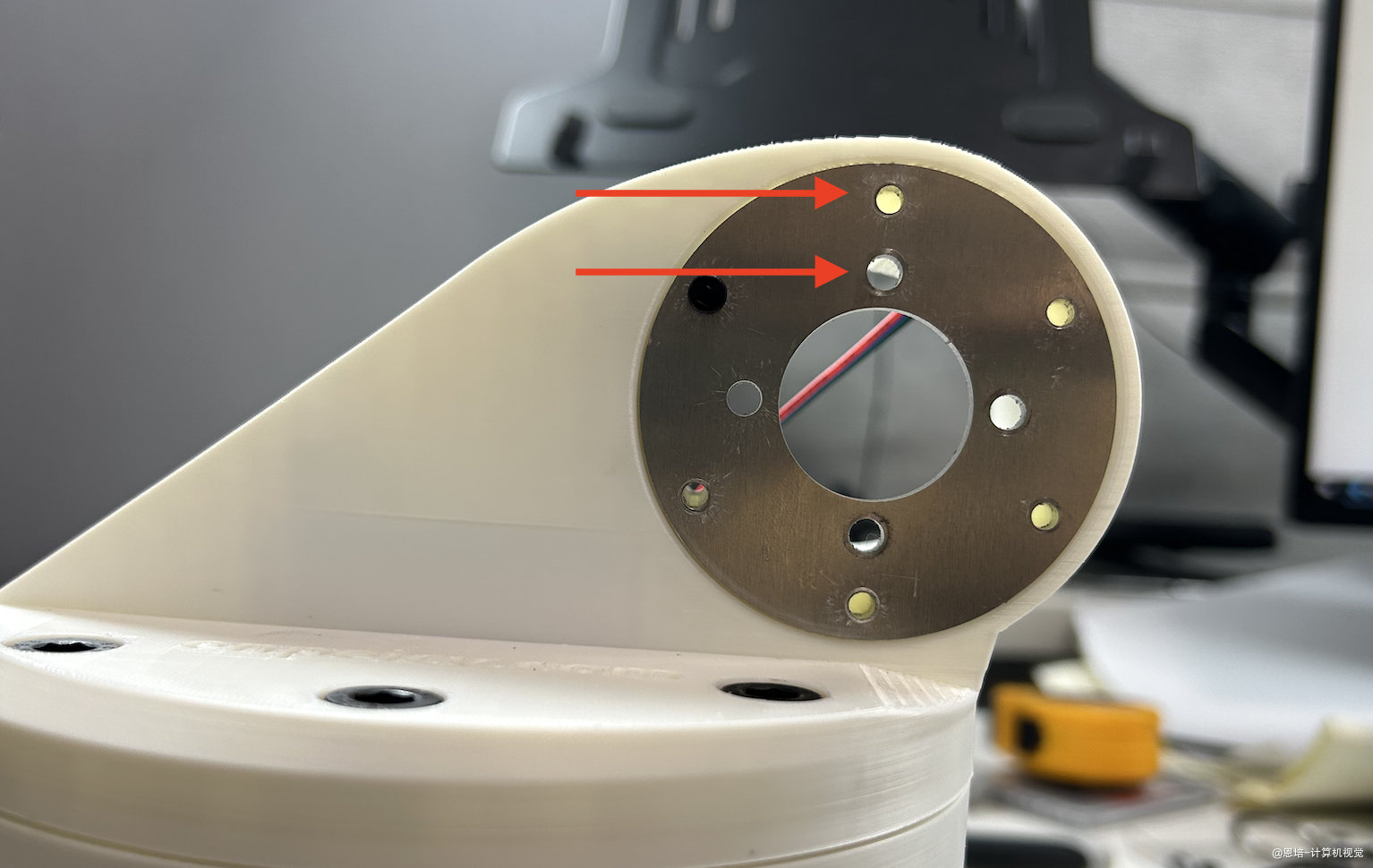
使用 4 根螺钉 M4×10(10054),将第二个电机固定在铝片上,如下图
正面
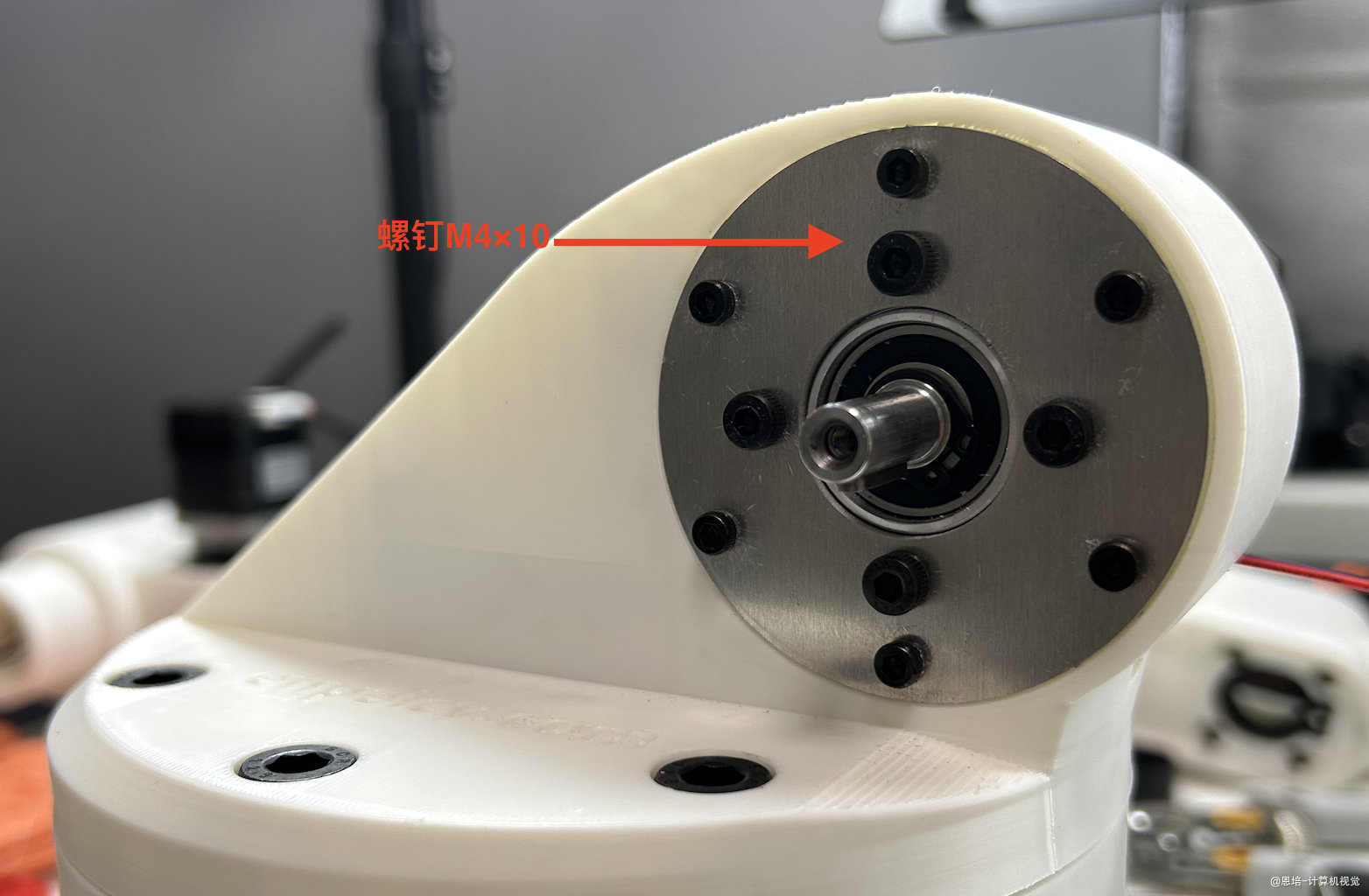
背面
注意:如背面图所示,要把驱动 8P 接头朝下。
3.7 安装小臂固定
找出以下零件备用:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10025 | |
J4 小臂固定 | 1 |
| / | / | 装好的第 3 个关节电机 | 1 |
| / | / | 装好的第 4 个关节电机 | 1 |
| 10022 | |
小臂铝片正面 | 1 |
| 10023 | |
小臂铝片背面 | 1 |
| 10058 | / | 螺钉 M3×40 | 6 |
| 10065 | |
螺母 M3 | 6 |
| 10054 | / | 螺钉 M4×10 | 8 |
| 10014 | / | 电子线-绿蓝 | 0.35m |
| 10015 | / | 电子线-红黑 | 0.35m |
-
参考前面的操作,将铝片装上,然后用螺钉 M4×10 将第 3 个关节电机固定好。
-
使用螺钉 M4×10 将第 4 个电机固定好,注意不要太用力拧,否则可能压坏外壳。
-
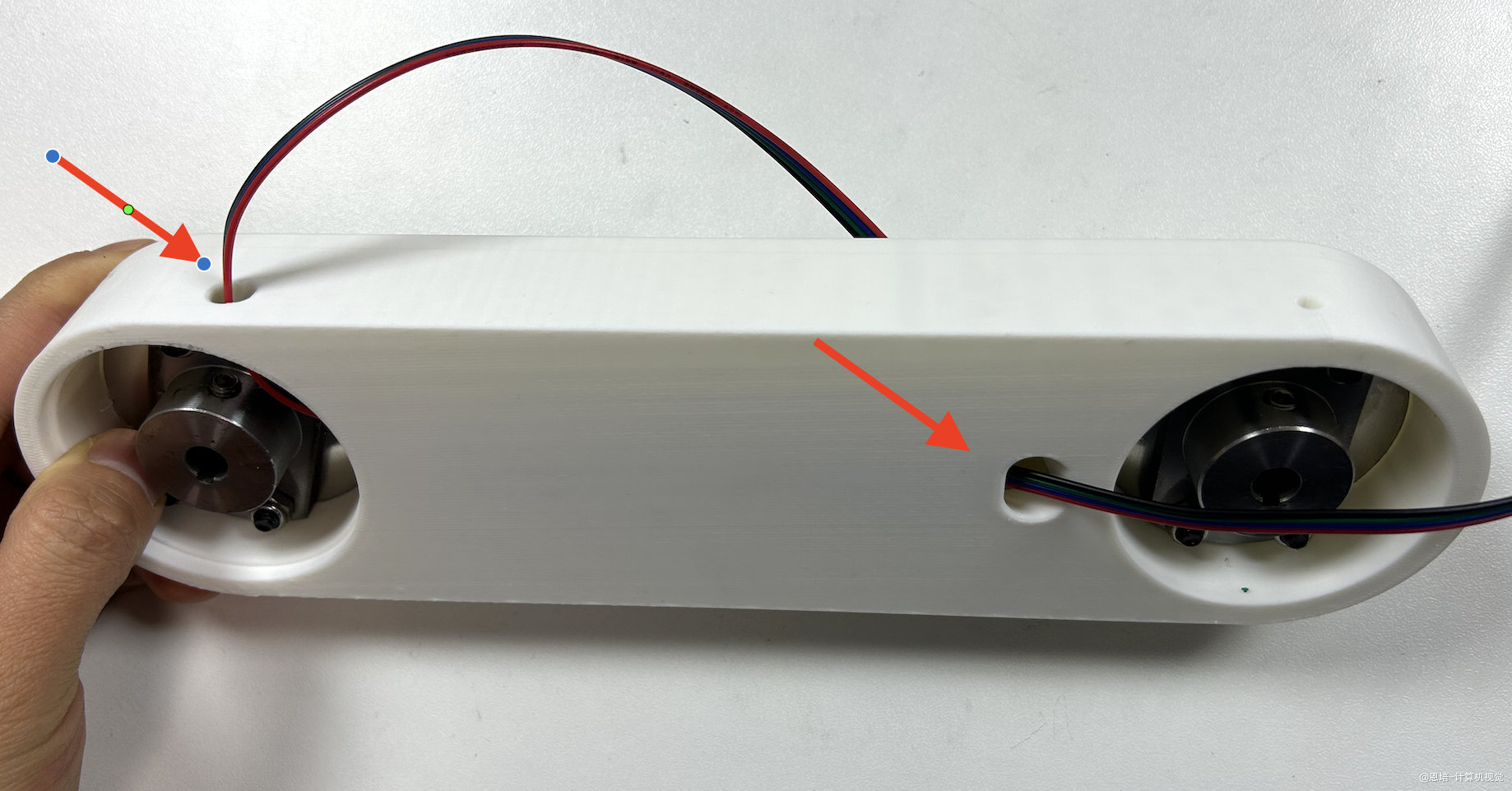
然后参考视频,将电子线-绿蓝、电子线-红黑穿过小臂固定,左侧露出约 90mm 即可。
如果电子线长度不均,不要同时调整四根线,可以拉住其中一根对应调整长度
注意缓用力,防止拉断,拉不动需要检查一下哪里卡住了。
-
最终组装效果
注意:要把驱动 8P 接头朝下。
3.8 安装小臂旋转与腕部
找出以下零件备用:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10021 | |
J5 小臂旋转 | 1 |
| 10004 | |
小轴承 | 4 |
| 10003 | |
小轴承支撑 | 1 |
| 10061 | / | 螺钉 M3×16 | 6 |
| 10046 | |
J5 电机拉紧板 | 1 |
| 10065 | |
螺母 M3 | 5 |
| 10060 | / | 螺钉 M3×20 | 1 |
| 10034 | |
同步带 | 1 |
| 10033 | |
J5 60 齿同步轮 | 1 |
| 10043 | |
J5 轴承盖子 | 1 |
| 10010 | |
J6 腕部 | 1 |
| 10055 | / | 螺钉 M3×8 | 4 |
| 10029 | |
导向轴支座 | 1 |
| 10026 | |
倒边螺母 M3x8 | 12 |
| 10044 | |
J6 端侧安装面 | 1 |
| 10062 | / | 螺钉 M3×10 | 8 |
| 10088 | |
3x7x1 金属垫片 | 4 |
| 10057 | / | 螺钉 M3×5 | 4 |
| 10075 | |
2.5MM 扳手 | 1 |
| 10076 | / | 1.5MM 扳手 | 1 |
-
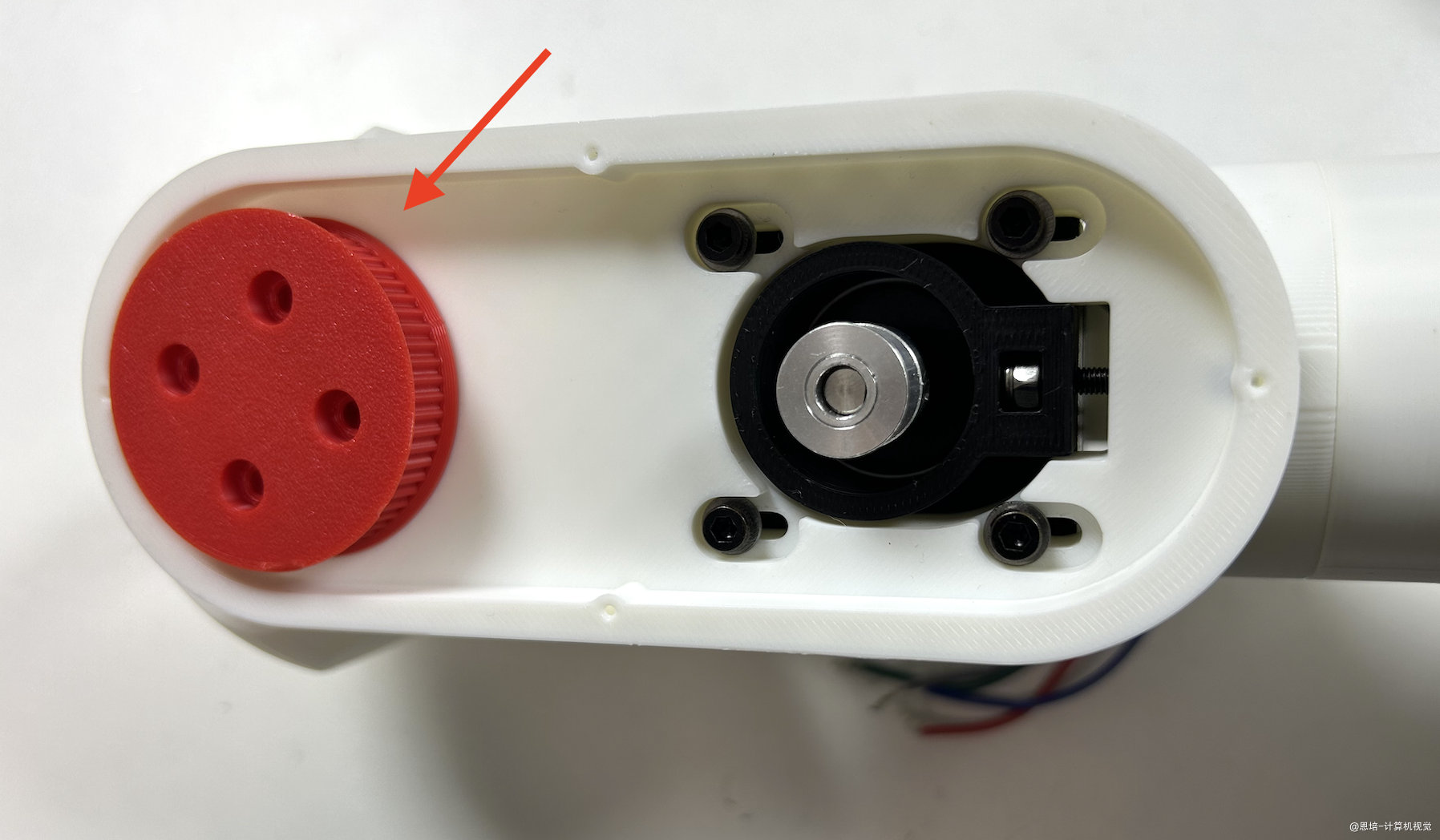
默认发货的时候,小臂旋转(10021)上会固定两个小轴承(10004),如下图:
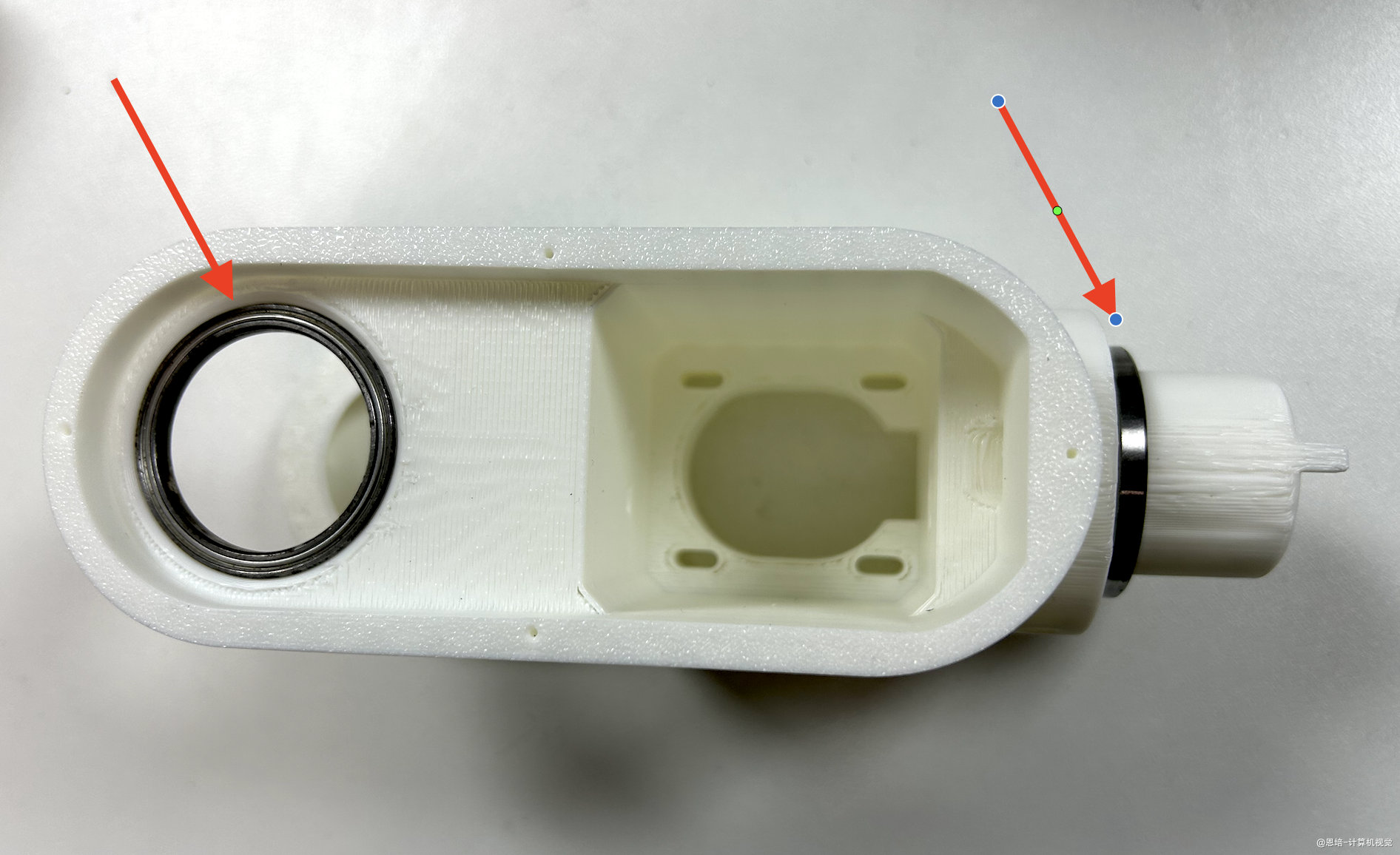
-
安装时需要注意不要磕碰掉这个阻挡,否则无法正常使用机械臂:
因为希望尽可能增大关节旋转范围,增加运动范围,所以阻挡位置设计的较小。
-
拿出另外两个小轴承,以及小轴承支撑(10003),按照视频教程,安装好,效果如下图:
由于热胀冷缩效应,部分同学可能会发现下图左侧的轴承安装较为困难。若遇到无法装入的情况,建议先将小臂旋转后置于 30℃ 左右的环境中(例如开启空调的房间,但温度请勿超过 40℃),静置半小时后再进行安装。

-
对接小臂固定,拧紧紧固螺丝,效果如下:
-
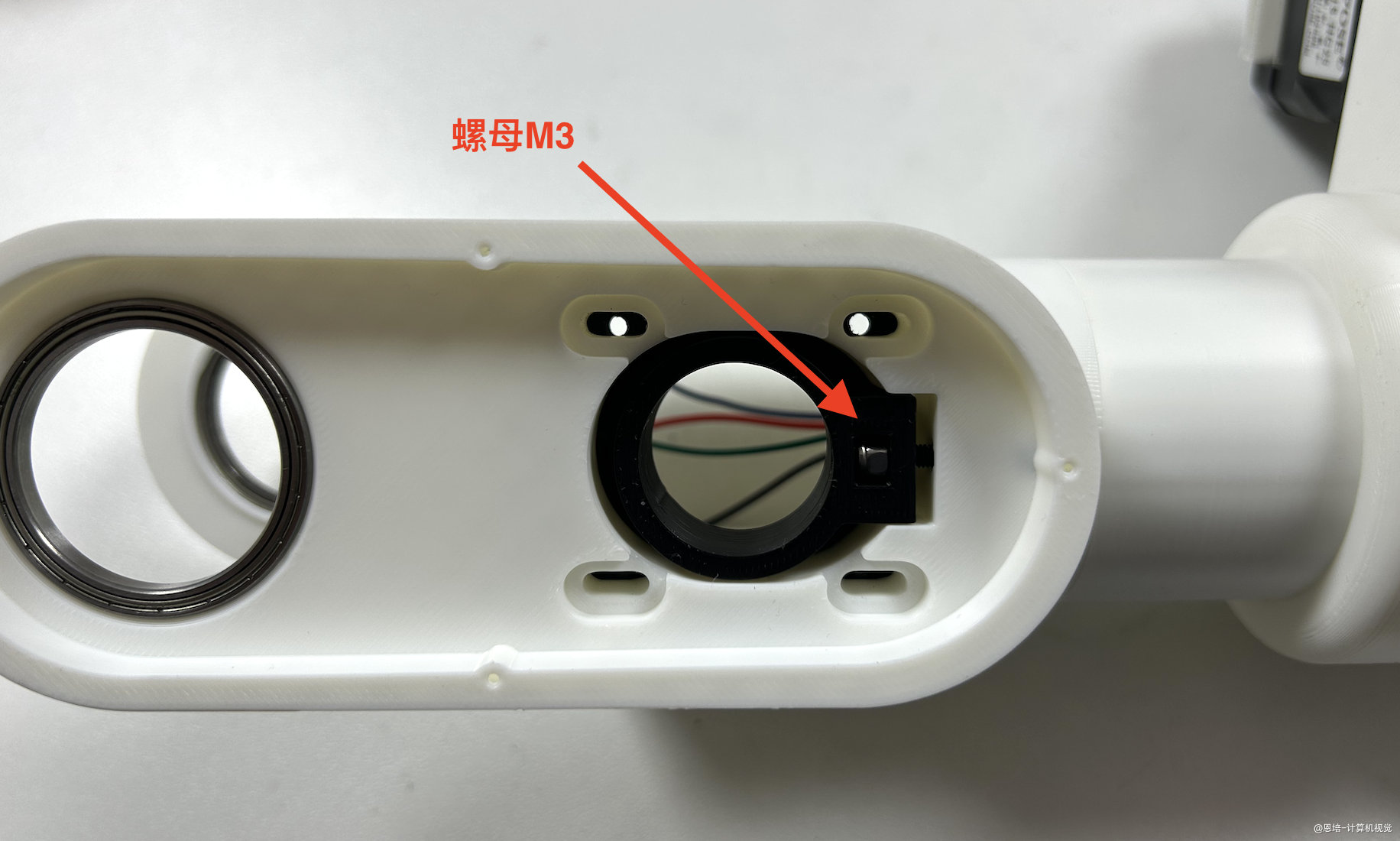
将一颗螺母 M3(10065)嵌入 J5 电机拉紧板(10046),用胶水固定,使用一根螺钉 M3×20(10060)装入小臂旋转
先不要拉紧,不然待会同步带装不上。
-
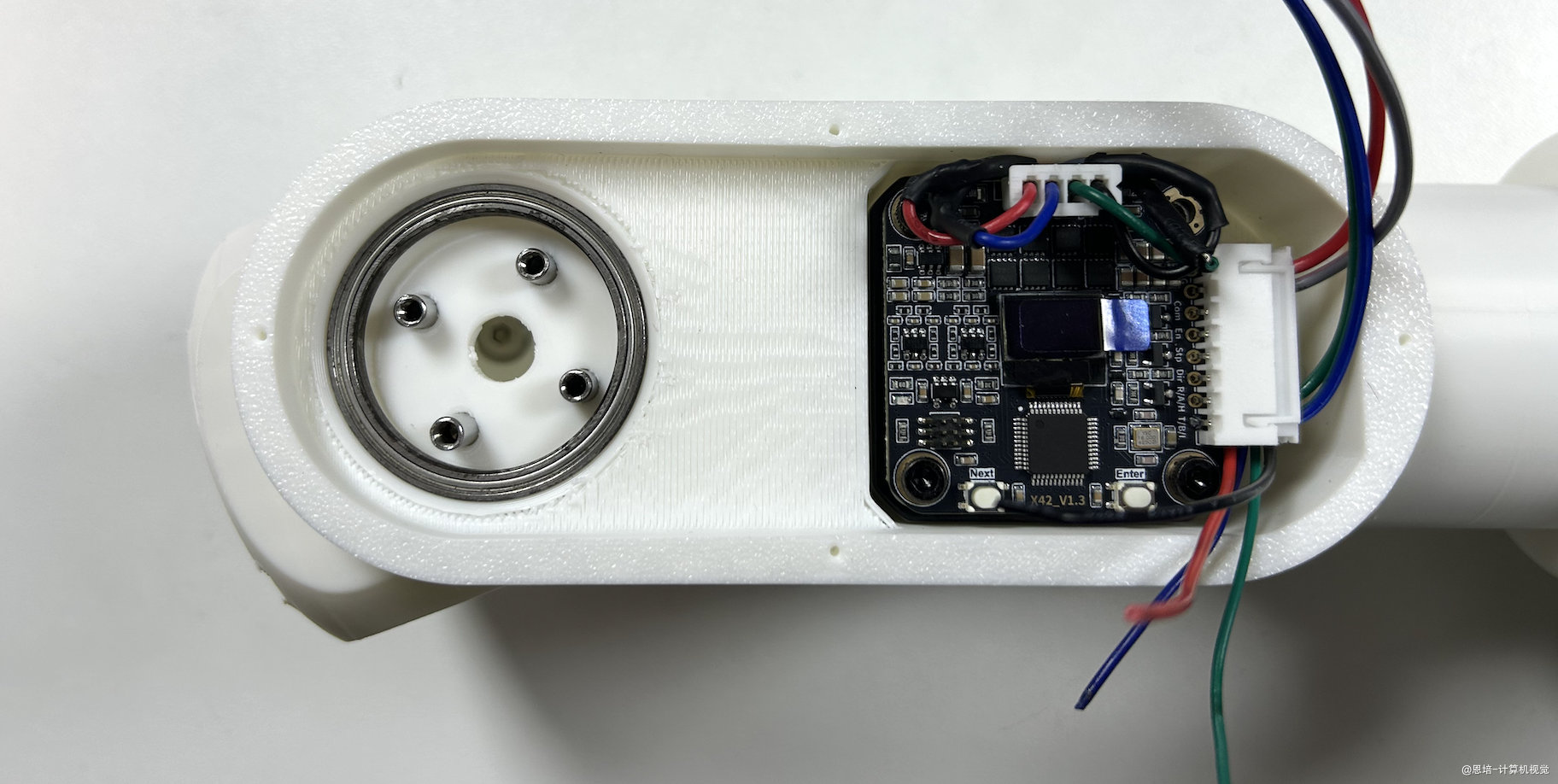
使用 4 根螺钉 M3×16(10061)和 4 片 3x7x1 金属垫片(10088),将已装好的第 5 个关节电机,固定在 J5 电机拉紧板(10046)上,不要拧太紧,要求拉紧板可以滑动,为后续安装同步带做准备:
- 如果 M3×16 打滑,可以将金属垫片去掉,或者自己换成稍微更长的螺钉,如 M3×18、M3×20
- 注意,第 5 个关节电机的 8P 信号线,需要提前装上,不然这一步操作后无法再装进去。
-
将 8 颗倒边螺母 M3x8(10026)嵌入 J6 腕部(10010)
如果塞不进去,可以先用其他圆柱物体(直径 3.8mm 左右,不能太粗,否则留有间隙导致误差)先疏通几次。
-
然后嵌入小臂旋转。
有孔的在电机驱动板这一侧,方便走线
-
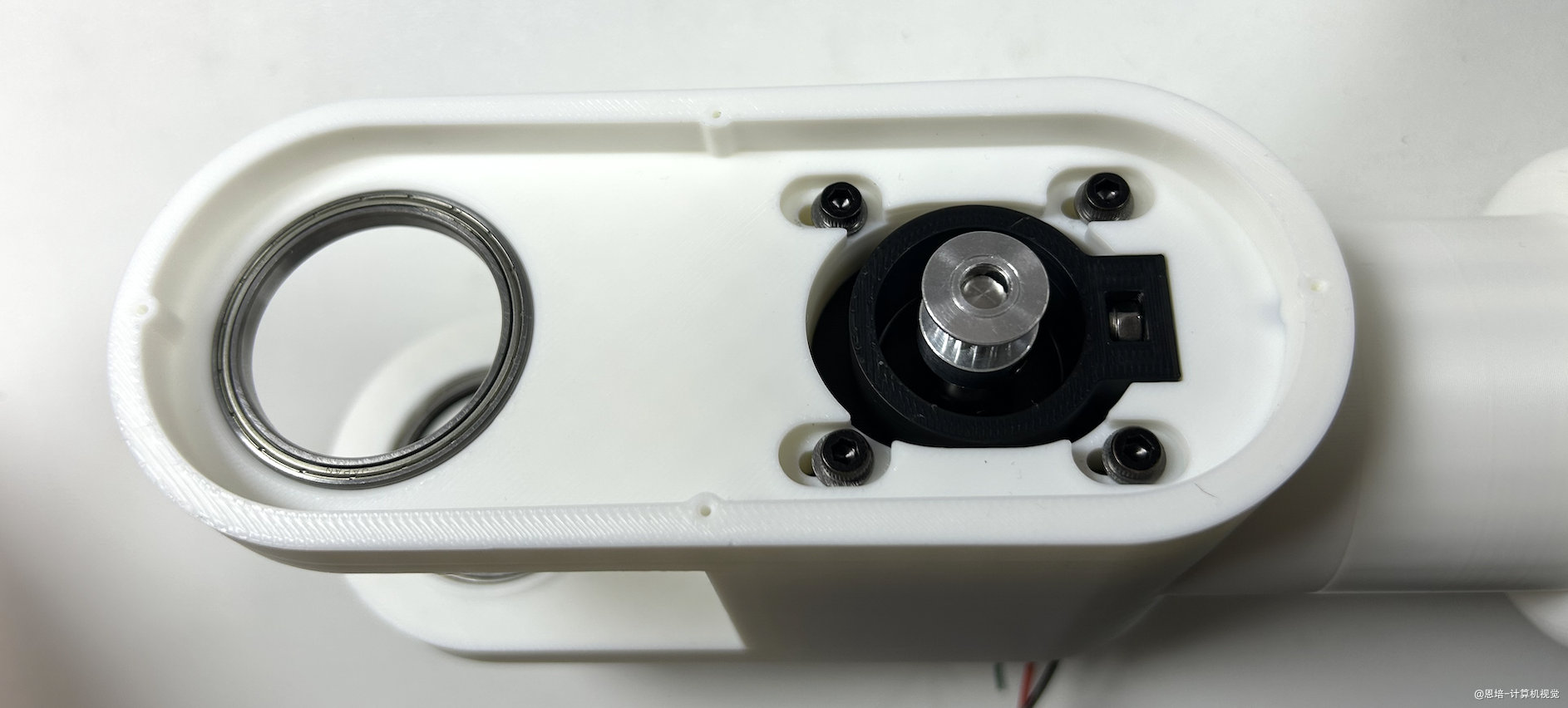
塞入 J5 60 齿同步轮(10033)和 J5 轴承盖子(10043)
注意同步轮在在皮带安装侧。
-
将 4 根螺钉 M3×10(10062)装入 J5 60 齿同步轮(10033),4 根螺钉 M3×5(10057)装入 J5 轴承盖子(10043)。
先大致拧紧,阻力变大这样腕部可能没法转动,后面再调节。
-
使用 4 根螺钉 M3×8(10055)将第 6 个电机安装好。
注意先把 8P 信号线穿入,再安装电机。

-
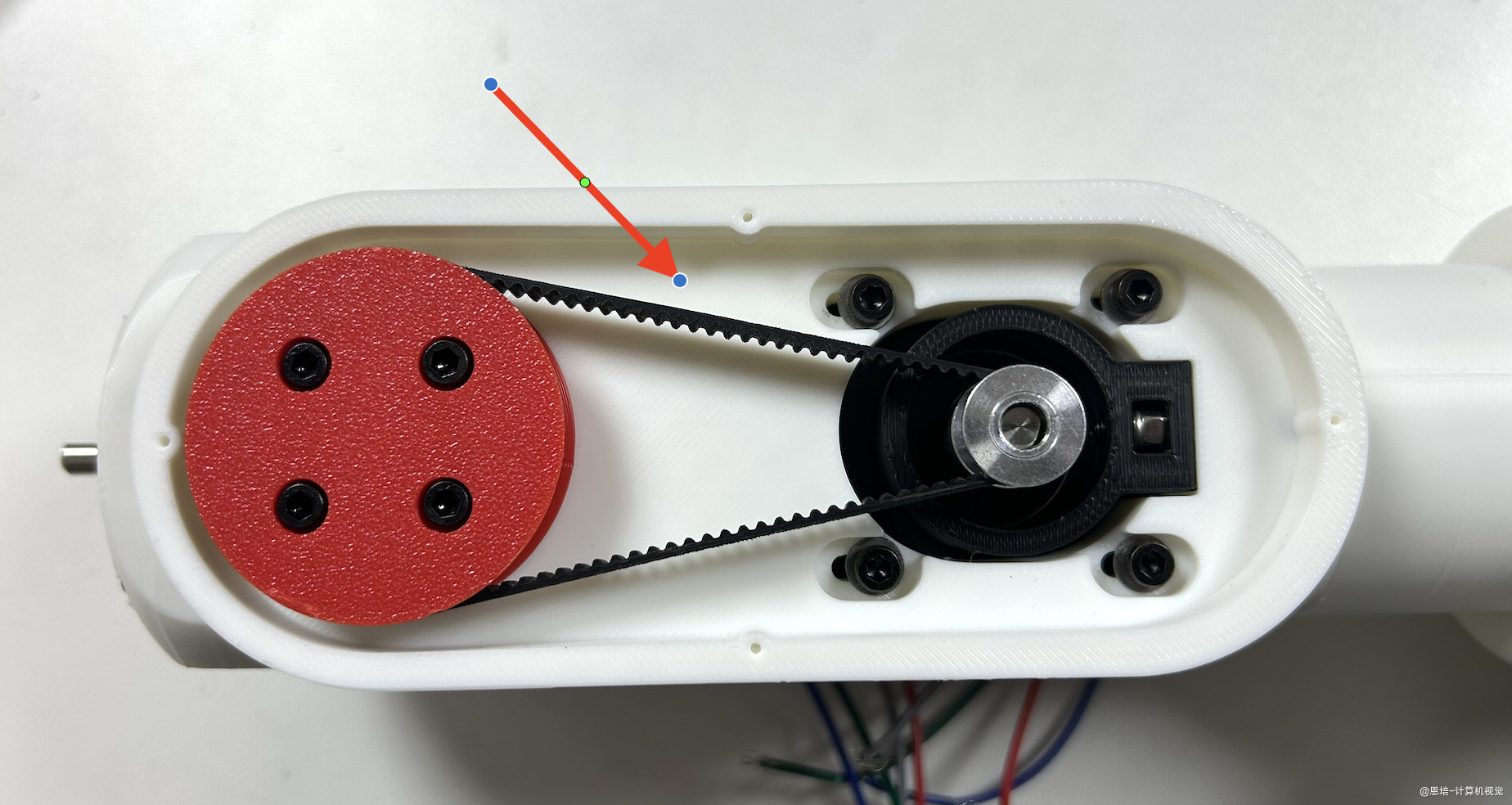
安装同步带
- 先将滑板拉倒最左侧安装同步带;
- 从小同步轮开始装;
- 拧紧螺丝,拉紧滑板;
- 再拧紧四个电机紧固螺丝。
- 如果螺钉打滑,不要继续拧,防止破坏螺纹。可以将这根螺钉的垫片去掉再拧,或者自己换成稍微更长的螺钉,如 M3×18、M3×20
-
安装末端
按照视频装好末端;
使用 1.5MM 扳手(10076)紧固螺丝,注意电机输出轴与端侧面应该在同一平面。
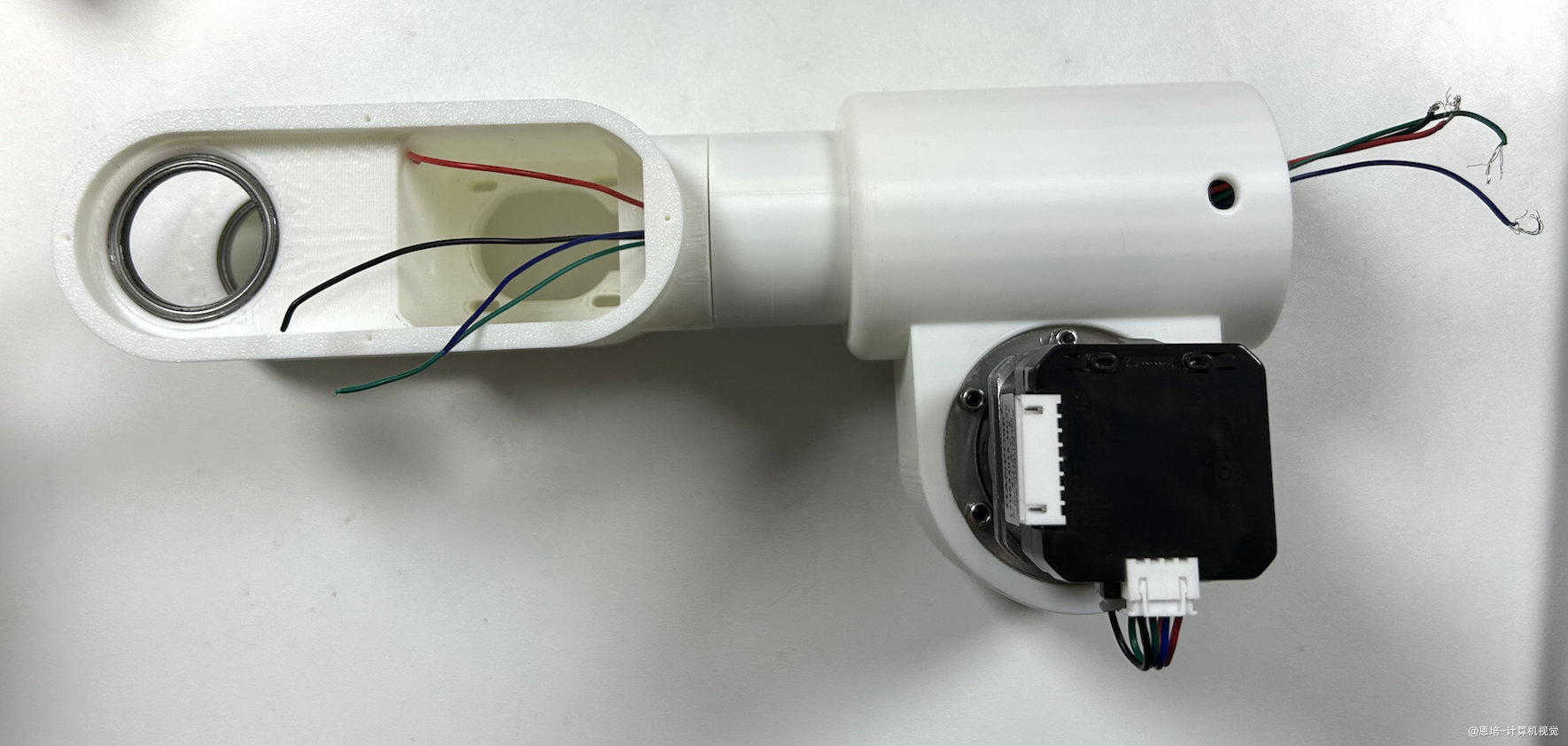
3.9 安装线缆
找出以下零件备用:
| 零件编号 | 图示 | 名称 | 数量要求 |
|---|---|---|---|
| 10017 | |
J1 底座闸门 | 1 |
| 10018 | |
带灯按钮开关 | 1 |
| 10066 | |
DC 12V 插座 | 1 |
| 10067 | |
4P 排插带孔座 | 1 |
| 10072 | |
2P 排插 | 1 |
| 10073 | |
12V 电源 | 1 |
| 10083 | |
热缩管 | 0.6 |
| 10085 | |
4P 连接线对插 | 1 |
| 10087 | |
快速接线端子 | 3 |
| 10062 | / | 螺钉 M3×10 | 2 |
| 10071 | |
2 芯软线 | 1.5 |
| 10036 | |
USB2CAN 转换器 | 1 |
- 将剩余的长款电机配套 4P 线(10086)按图示穿过大臂
-
将大臂固定在腰关节,将小臂旋转固定在大臂,如下图:
如果塞不进法兰,可能是紧固钉螺太紧,可以先松一下
-
接线原则复习:
- 整体就四根线,正负极、CAN_H、CAN_L,一定不要漏接、短接;
- 不要管线的颜色,始终要查看驱动板正面线的顺序,如左一图,蓝色是正极,红色是 CAN_L
驱动板 整体 -
小臂旋转接线
- 将小臂旋转先来回转动几圈(注意不要破坏内部阻挡台阶),让穿过小臂固定的四根线舒展,以这个顺序接线:红色(正极)、黑色(负极)、绿色(CAN_H)、蓝色(CAN_L)
- 第 5、6 个电机的线序自己根据上图判断(每个人可能不一样)
- 有剥线器最好,没有可以用打火机
- 如果没有锡焊,用热缩管紧固即可(电流不大)
- 热缩管裁剪为 20mm 即可
- 打火机灼烧热缩管不要太长时间,缩住即可,不要烧破电子线
- 要保证盖子能盖上
-
小臂固定接线
穿过大臂的四根线,以这个顺序接线:红色(正极)、黑色(负极)、绿色(CAN_H)、蓝色(CAN_L)
将小臂固定运动到极限位置,保证线长够用。
-
腰关节接线
可以拿出 4P 连接线对插(10085)将线接起来,也可以不用。

-
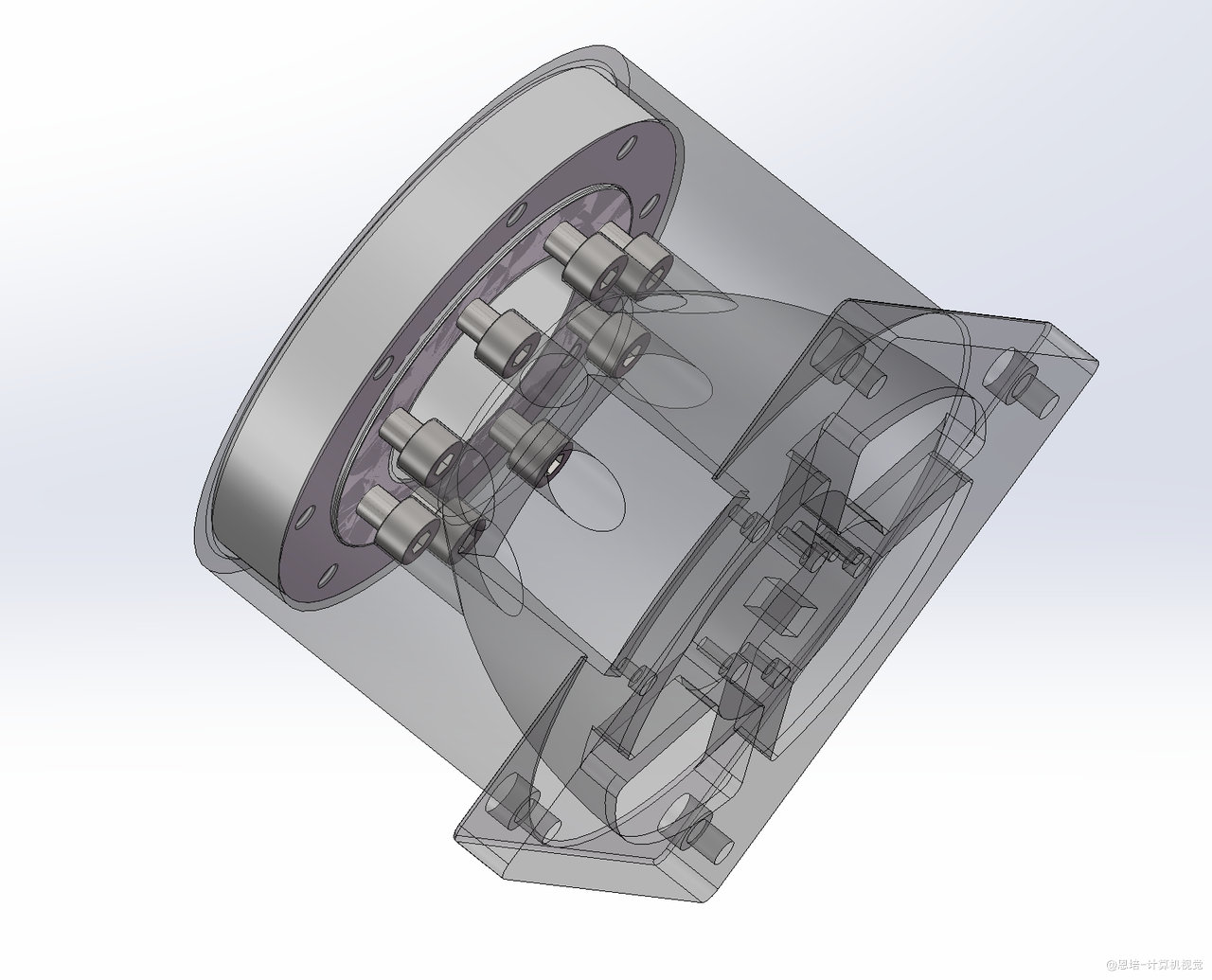
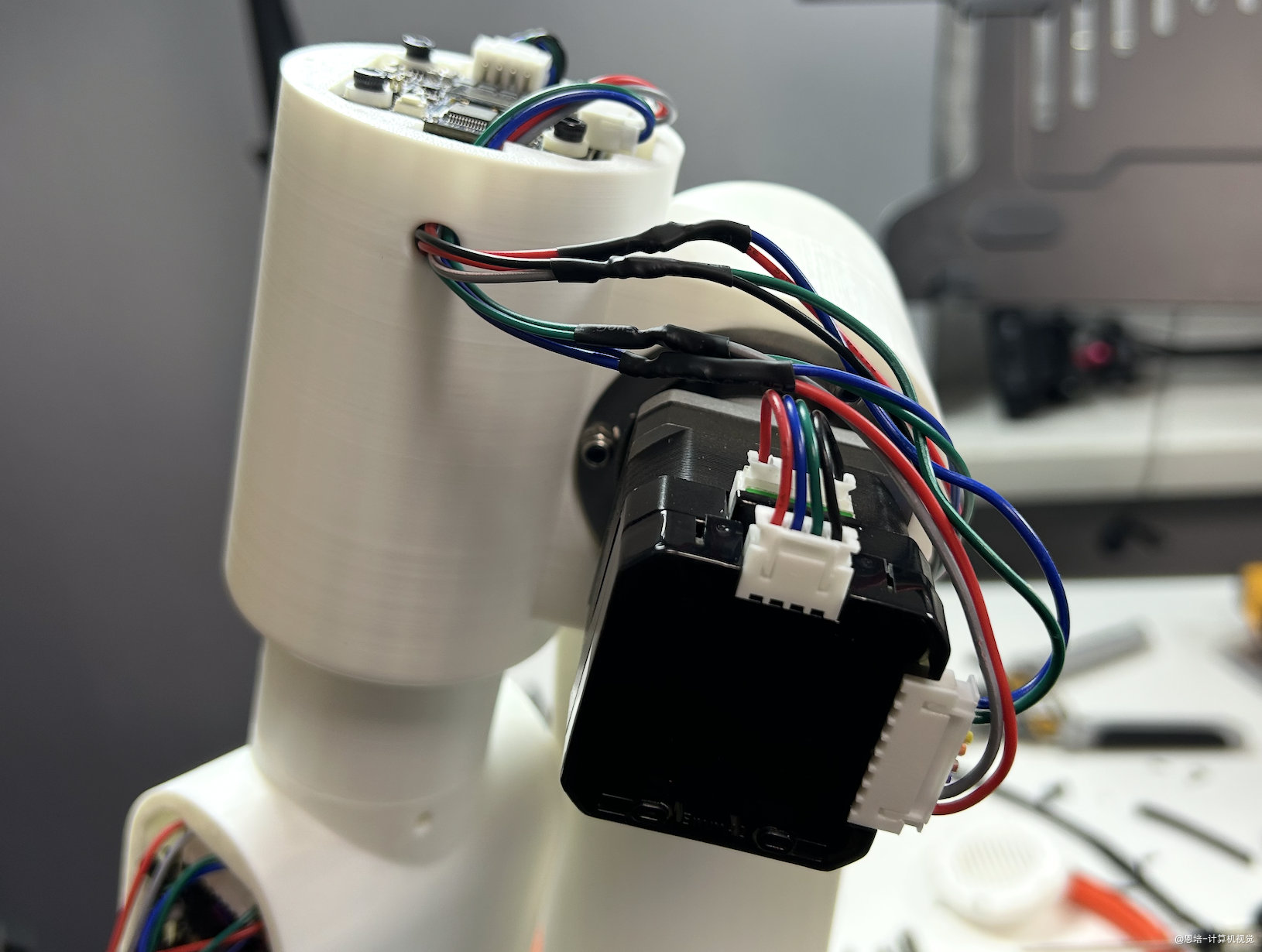
固定底座接线
正面 背面 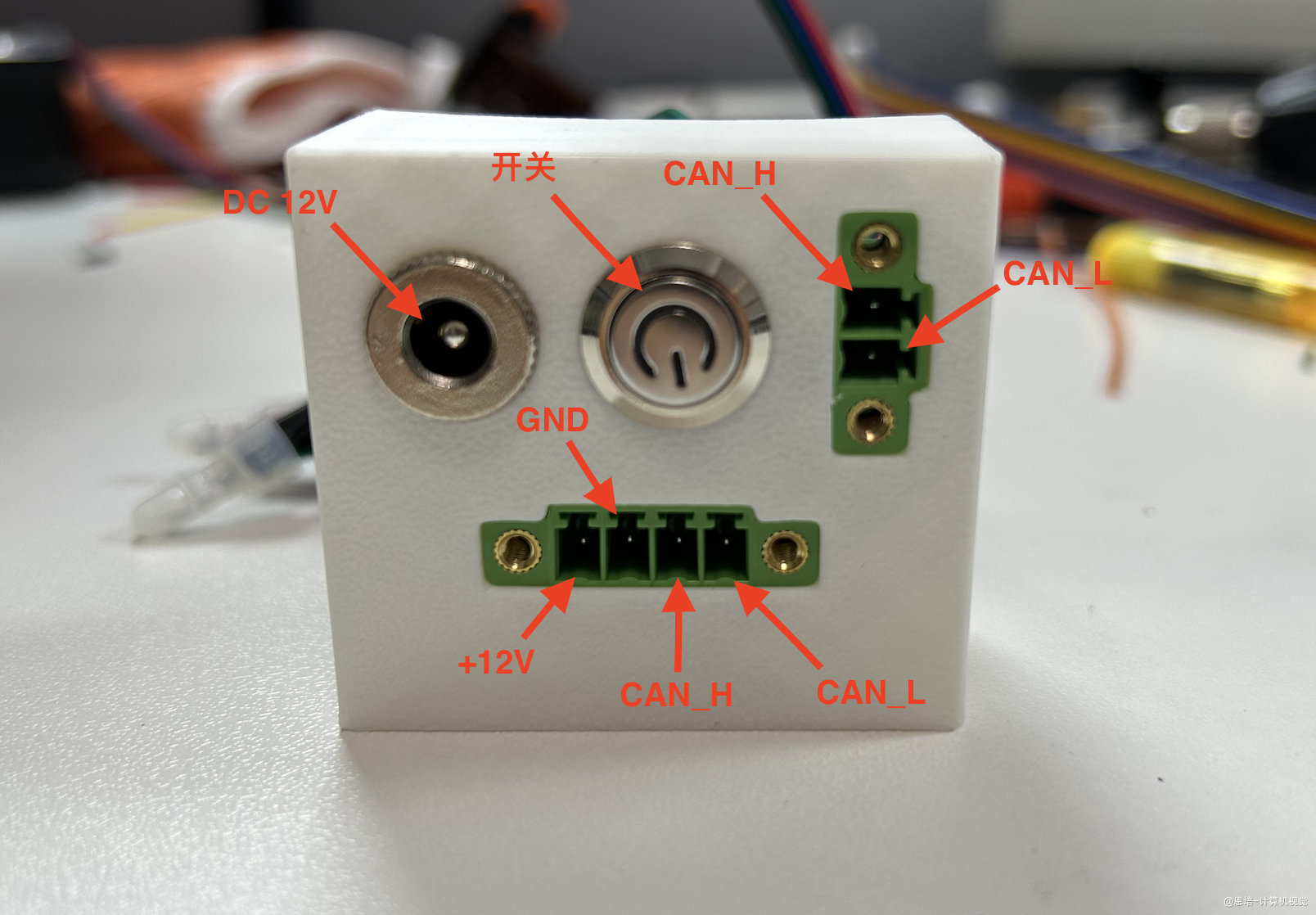
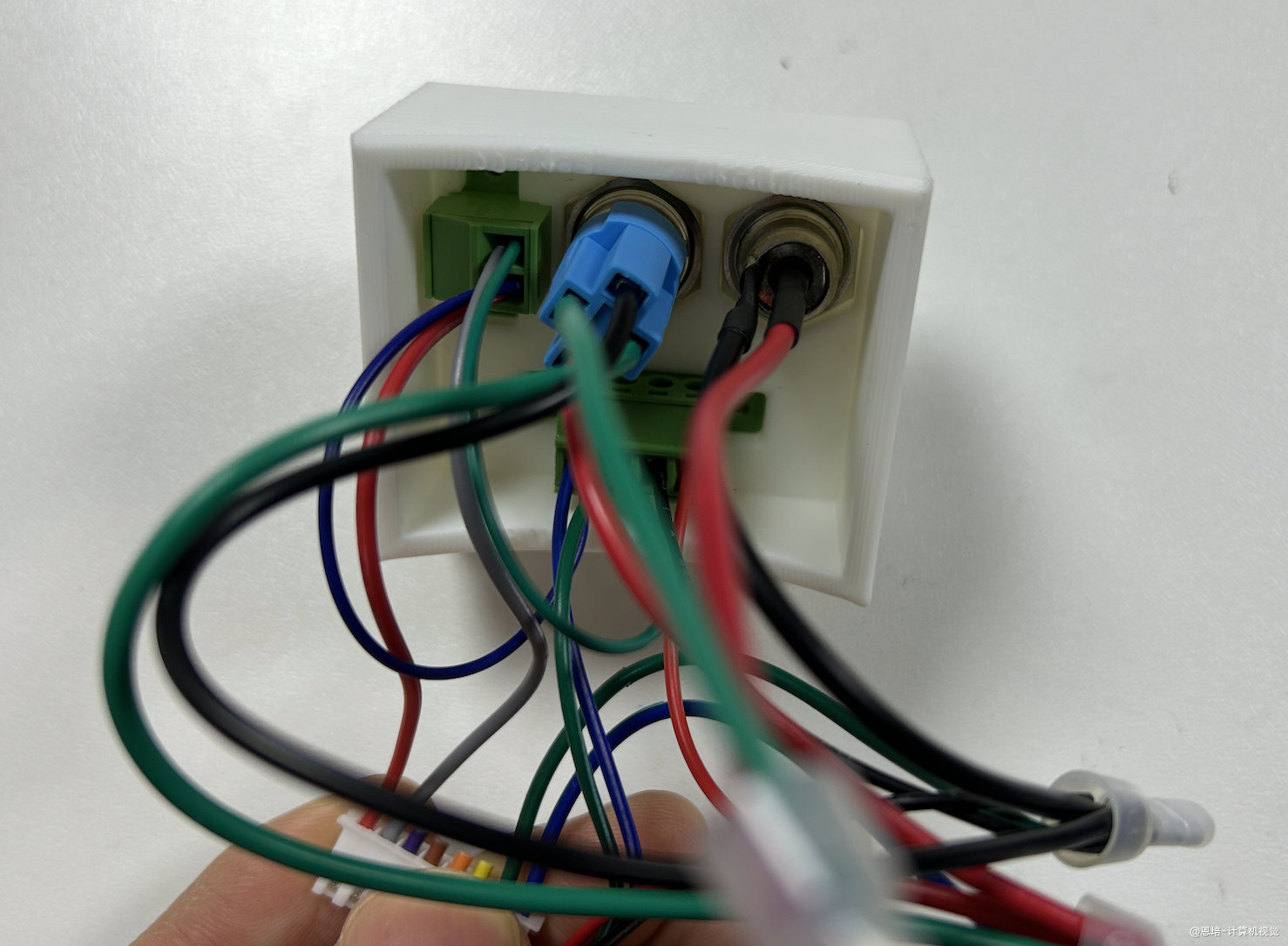
配合上面两幅图,以及下图连线示意图(注意,它是背面,线序与正面镜像),你需要先理解这些器件功能,对应引脚功能,否则可能引起短路,或者通信障碍。
- 12V 电源适配器插入 12V 电源插座为机械臂提供电源
- 带灯开关按下连通正极,同时指示灯亮
- 2P 排插连接 USB2CAN 转接头,用于接收电脑控制指令,上方是 CAN_H,下方是 CAN_L
- 4P 排插连接夹爪控制盒,提供夹爪控制盒电源,以及并联 CAN_H、CAN_L。注意从左往右(从正面看)的线序分别是:+12V、GND、CAN_H、CAN_L
- 贯通机械臂的 4 根线也需要与这四种线相连
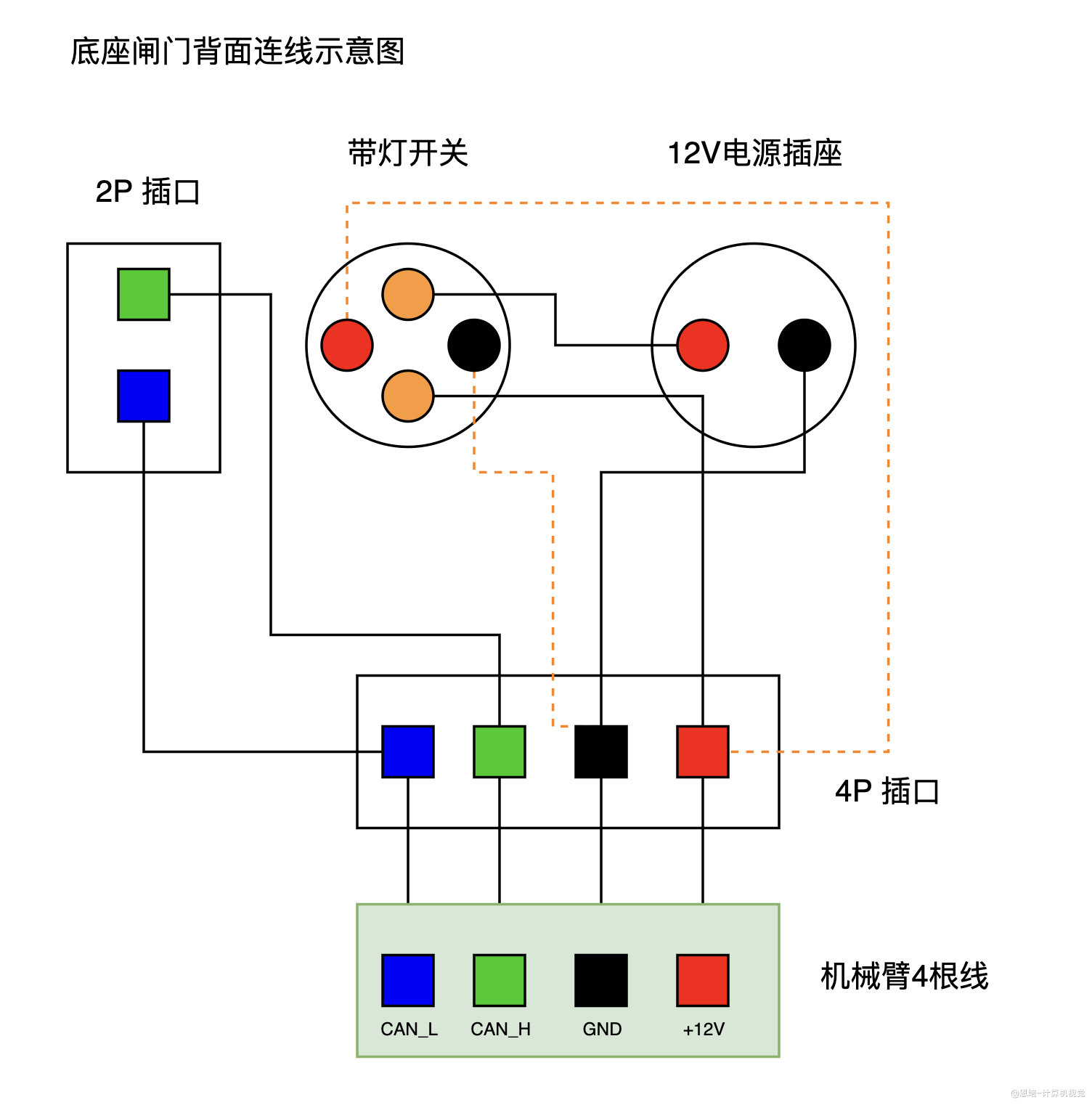
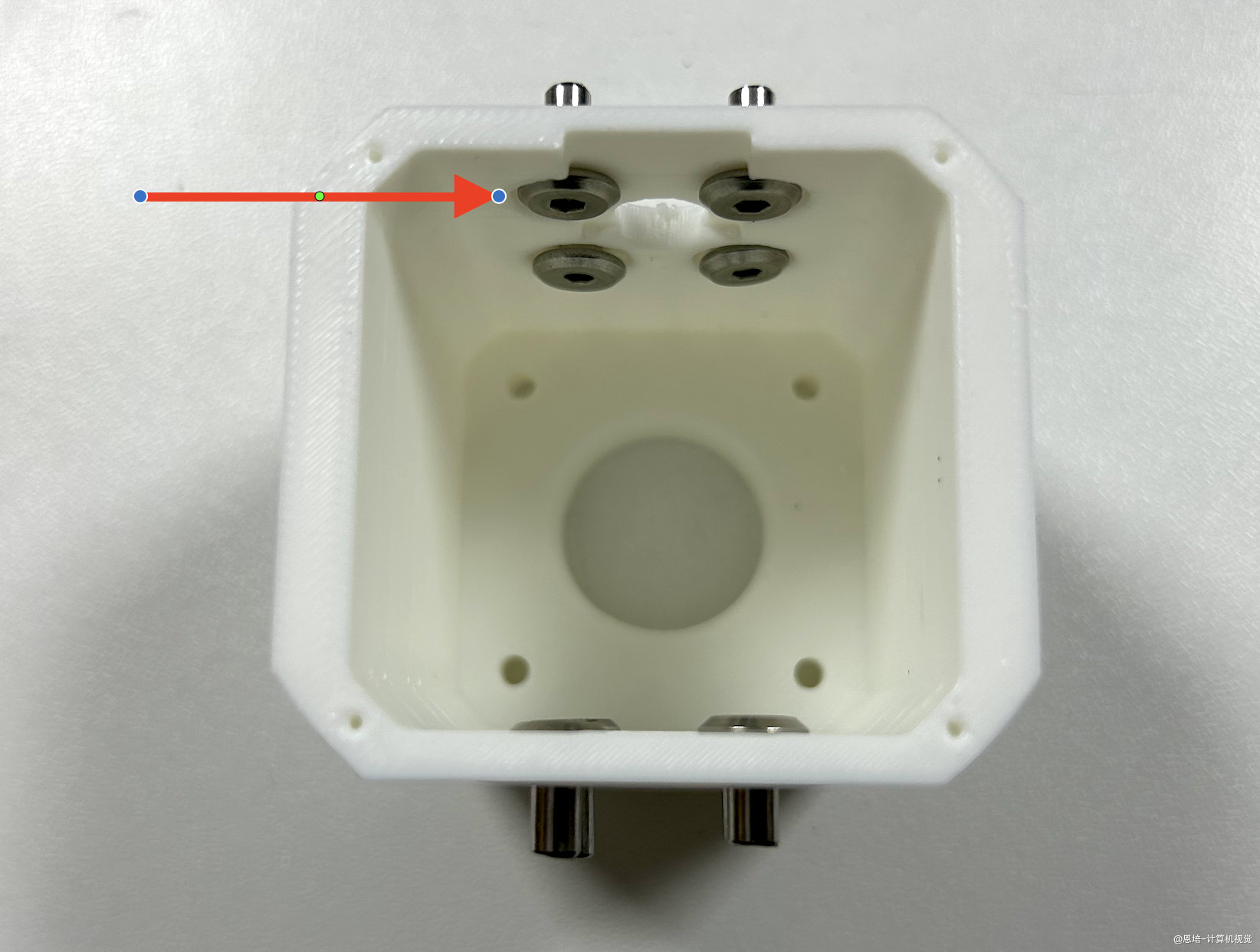
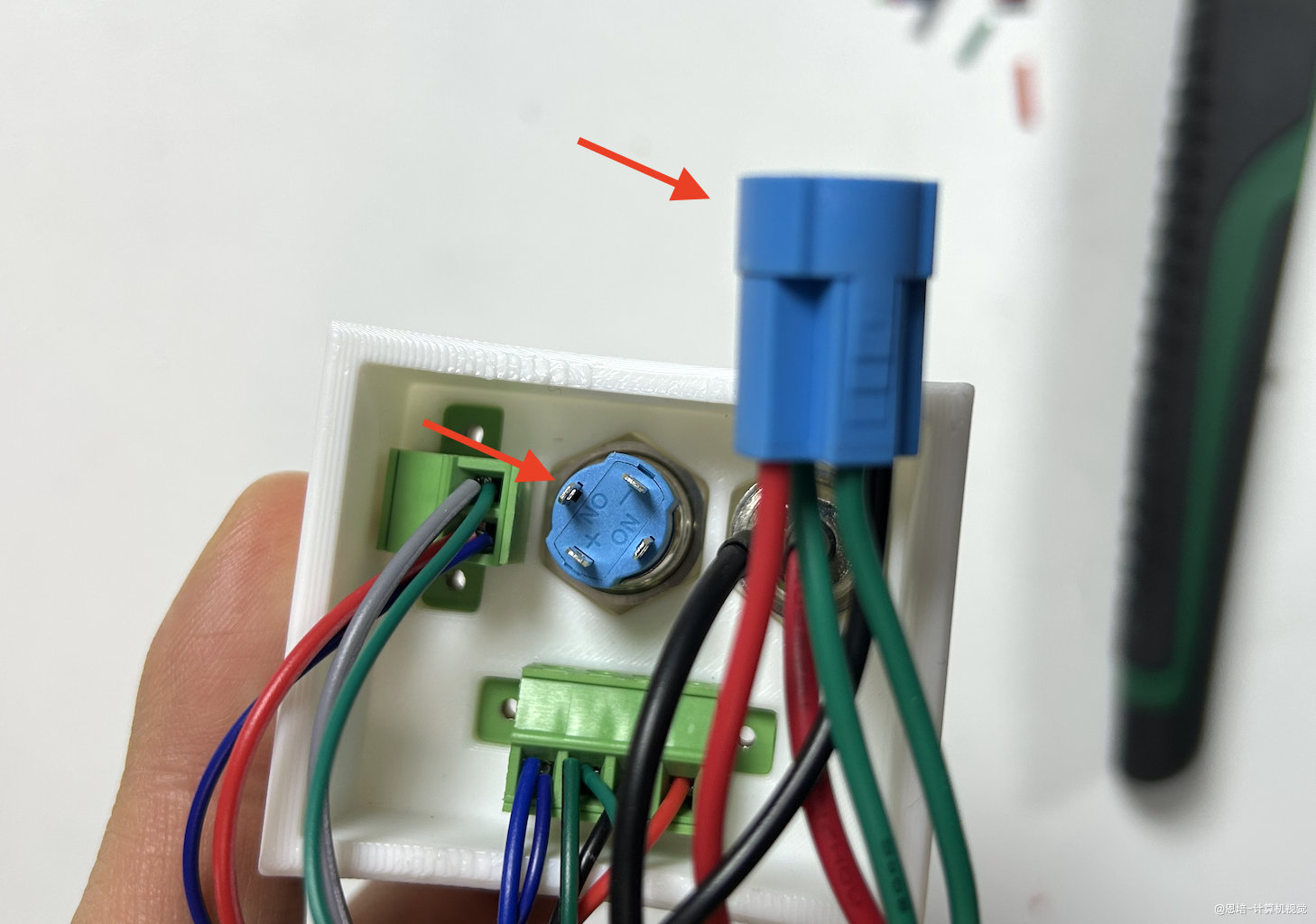
需要重点注意的是带灯开关的连线:
-
如下图,拔开带灯开关插座,可以看到四个脚,分别是
- NO:常开端,按下按钮后闭合,对应上图的橙色脚,我们用来断开和闭合 +12V
- +:对应上图红色脚,是指示灯的正极,连接 +12V
- -:对应上图黑色脚,是指示灯的负极,连接 GND
-
重新插上灯带开关的插座,注意红色对应 + 符号。
-
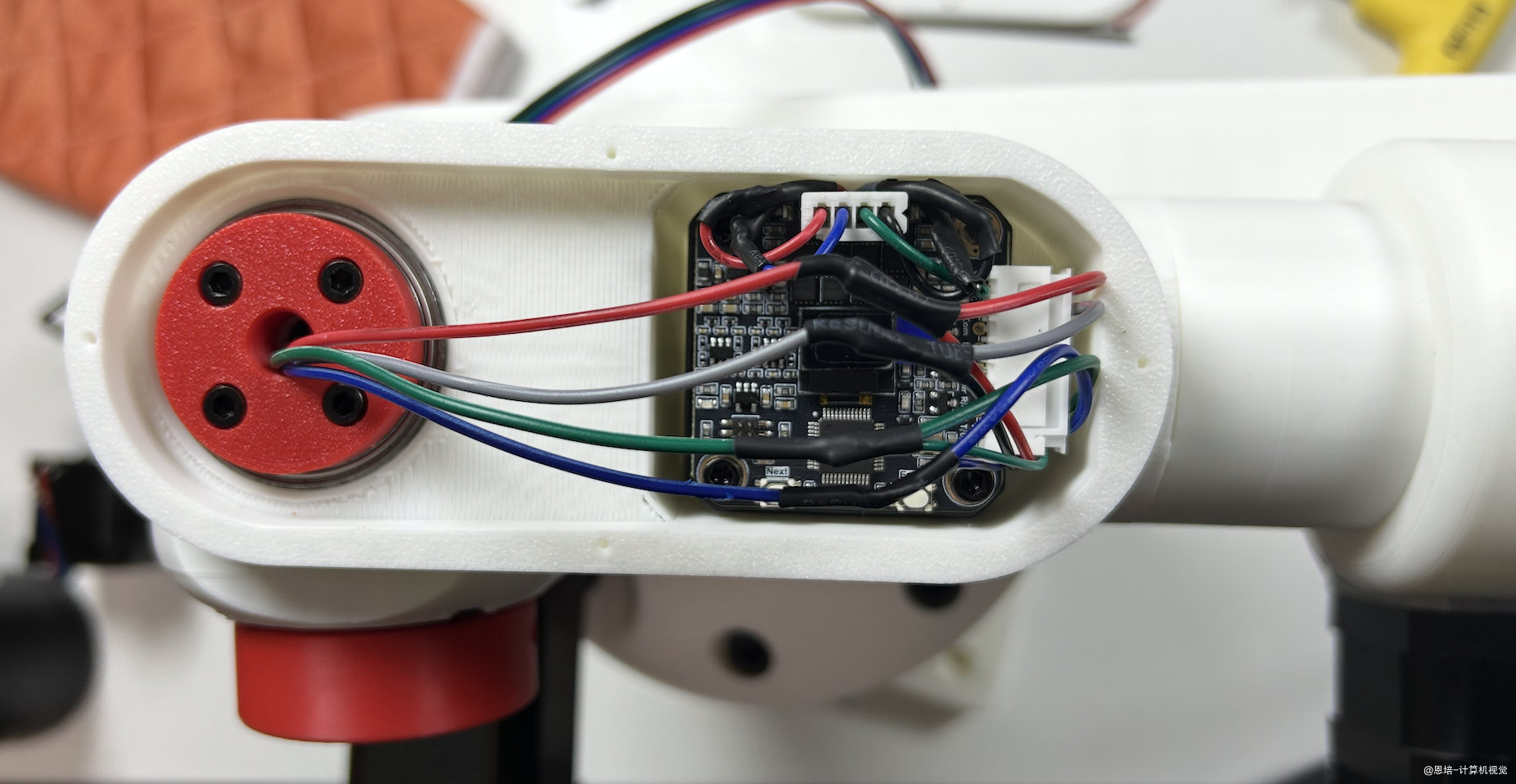
然后需要将贯穿固定底座的 4 根线,以及第一个电机的 8P 信号线全部连接到对应位置。

-
将 USB2CAN 转换器(10036)与插槽母座相连。
- 需要保证 USB2CAN 转换器的 CAN_H 与底座 2P 插头 CAN_H 链接(上孔),CAN_L 同理。
- 2 芯软线红色连接 CAN_H、黑色连接 CAN_L。
USB2CAN 转换器 固定底座 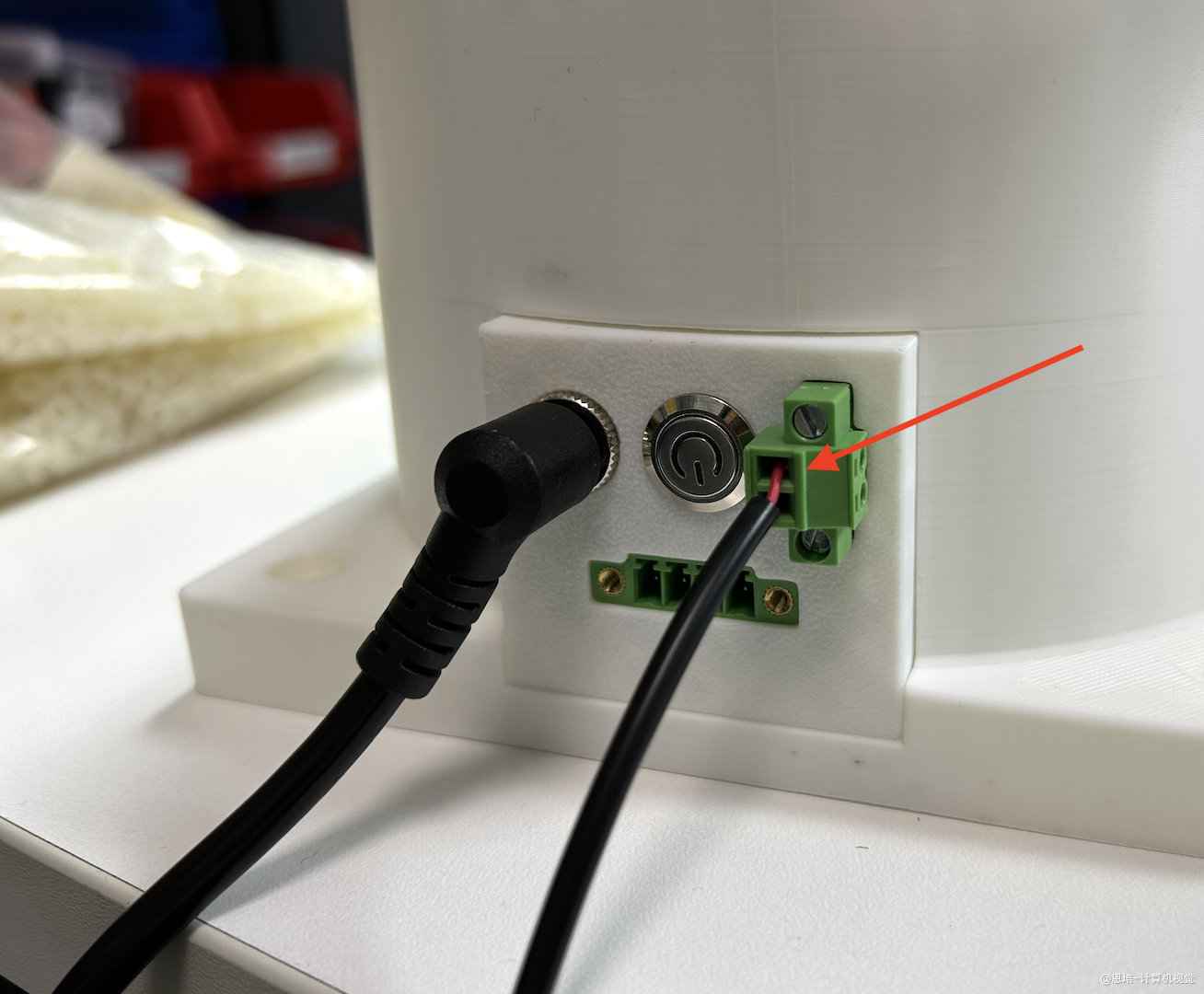
一切处理完毕,跳到《机械臂调试校准》