2.6 ACT 原理介绍
1. ACT 简介:
下面的原理介绍,基于 ACT 论文,知识点较多,如果有谬误,欢迎反馈。
| 时间 | 版本 | 改动点 |
|---|---|---|
| 2025-09-09 | V 1.0 | 第一次成稿 |
这篇论文主要介绍了一个用于精细双臂操作的低成本学习系统,包含两个核心组件:
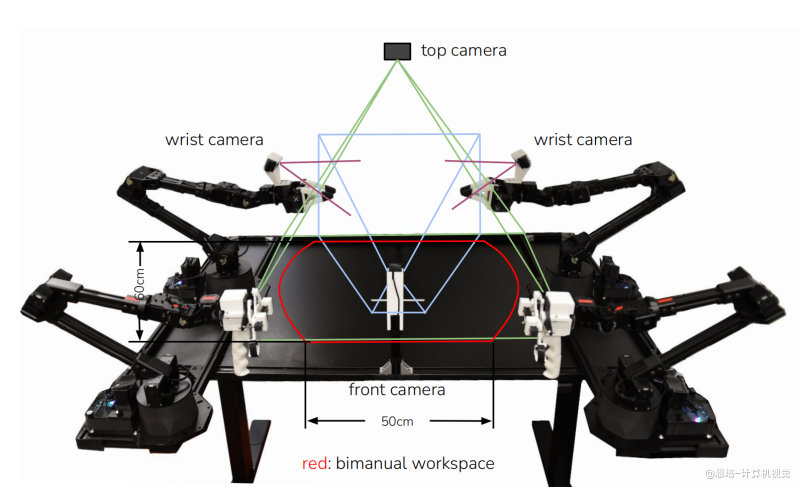
1.1.1 ALOHA 硬件系统
- 低成本双臂遥操作平台:整套系统成本不到 2 万美元,使用现成机器人和 3D 打印组件构建
- 设计原则:低成本、多功能、用户友好、易维修、易组装
- 技术特点:
- 使用关节空间映射进行遥操作(操作员通过反驱动较小的"领导"机器人来控制较大的"跟随"机器人)
- 配备 4 个摄像头提供多视角观察
- 50Hz 高频控制,支持精确操作
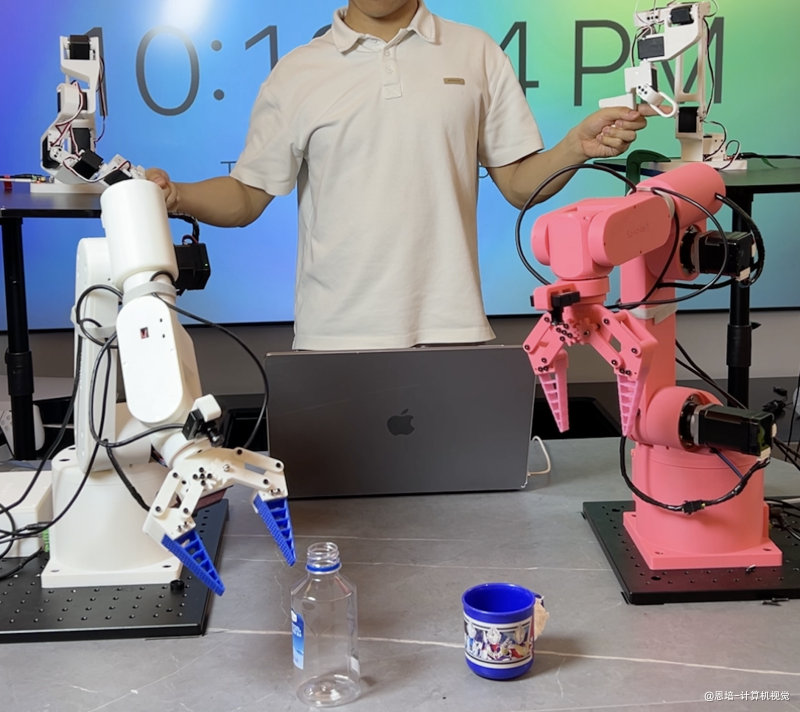
作为对比,我将咱们的机械臂与 Aloha 的放在一起,可以看到硬件主要有:
下图是都是双臂系统,可以做一些双手配合的工作。
- 遥操作用的主臂
- 执行用的从臂
- 从臂手腕上的相机
- 顶部相机
- 前相机
| Aloha | Episode 1 |
|---|---|
 |
 |
下面的视频是遥操作视频:
1.1.2 ACT 学习算法
Action Chunking with Transformers,是一种新的模仿学习算法:
核心创新:
- 动作分块:预测未来 k 个时间步的动作序列,而非单步动作,有效减少复合误差
- 时序集成:通过重叠动作块的加权平均实现平滑执行
- 条件变分自编码器(CVAE):处理人类演示数据的随机性和多模态性
- Transformer 架构:用于序列建模和多模态信息融合
实验成果
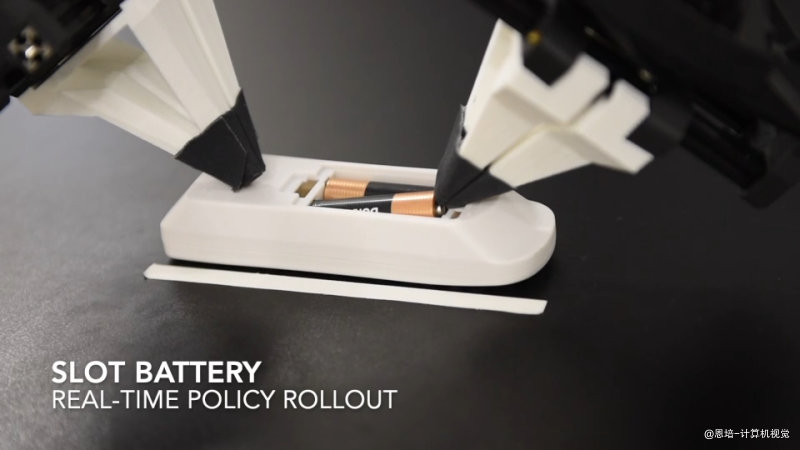
- 任务能力:能执行开调料杯盖、插电池、穿束带等 6 种精细操作任务
- 性能表现:80-90% 成功率,仅需约 10 分钟演示数据(50 个轨迹)
- 显著优势:相比现有方法(BeT、RT-1、VINN 等)有大幅性能提升
下面的视频是 ACT 算法推理的效果视频,可以看它有一定的鲁棒性:
2. 核心创新:动作分块 (Action Chunking)
请提前了解一下:附录一、策略(Policy)
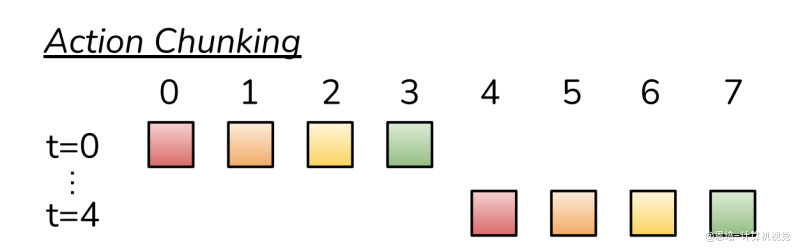
2.1 基本概念:什么是 Action Chunking?
-
传统方法:每个时间步预测一个动作
- 状态
比如:机械臂当前各关节角度、摄像头拍摄的画面 - 动作
比如:机械臂各关节目标角度
-
Action Chunking:每 k 个时间步预测 k 个连续动作
-
核心思想:将动作序列"打包"成块(chunk),作为一个整体单元执行
-
举例说明:
-
任务场景:抓取桌上的苹果
-
机械臂状态
- 6 个关节
- 1 个夹爪:开合程度 (0=完全闭合,1=完全张开)
- 动作维度:每个
-
传统方法:
t=1: 观察→苹果在右前方 预测→ a_1 = [10°, 5°, 0°, 0°, 0°, 0°, 0.8] (向右转,夹爪张开) t=2: 观察→机械臂开始转动 预测→ a_2 = [8°, 10°, 5°, 0°, 0°, 0°, 0.8] (继续调整) t=3: 观察→接近苹果 预测→ a_3 = [2°, 15°, 10°, 5°, 0°, 0°, 0.8] (伸向苹果) ... (每步都要重新观察和决策) -
Action Chunking (假设 k=10)
t=1: 观察→苹果在右前方 一次性预测→ a_1:11 = [ [10°, 5°, 0°, 0°, 0°, 0°, 0.8], # 第1步:向右转 [8°, 10°, 5°, 0°, 0°, 0°, 0.8], # 第2步:调整角度 [5°, 15°, 10°, 5°, 0°, 0°, 0.8], # 第3步:伸向苹果 [2°, 18°, 15°, 8°, 2°, 0°, 0.8], # 第4步:继续接近 [0°, 20°, 18°, 10°, 5°, 2°, 0.8], # 第5步:精确定位 [0°, 20°, 18°, 10°, 5°, 2°, 0.6], # 第6步:准备抓取 [0°, 20°, 18°, 10°, 5°, 2°, 0.4], # 第7步:夹爪收缩 [0°, 20°, 18°, 10°, 5°, 2°, 0.2], # 第8步:继续收缩 [0°, 20°, 18°, 10°, 5°, 2°, 0.0], # 第9步:夹紧 [0°, 15°, 12°, 5°, 2°, 0°, 0.0] # 第10步:轻微提起 ] 连续执行这10步,然后在t=11时重新观察环境 -
效果
方面 传统方法 Action Chunking (k=10) 观察频率 每步观察 每 10 步观察 预测内容 (1,7) (10,7) 决策次数 10 次 1 次 误差累积 高(10 次机会出错) 低(1 次机会出错)
-
2.2 解决的核心问题
复合误差问题(Compounding Error)
时间步1: 小误差ε₁
时间步2: 误差ε₁ + ε₂
时间步3: 误差ε₁ + ε₂ + ε₃
...
最终误差: Σεᵢ → 任务失败
Action Chunking 如何缓解?
- 有效视野缩减:k=100 时,400 步任务变成 4 步决策
- 误差累积减少:从 400 次累积变成 4 次累积
- 决策点减少:减少了 96% 的关键决策点
2.3 Chunk Size (k) 的影响
实验结果分析(在作者自己的实验上测量)
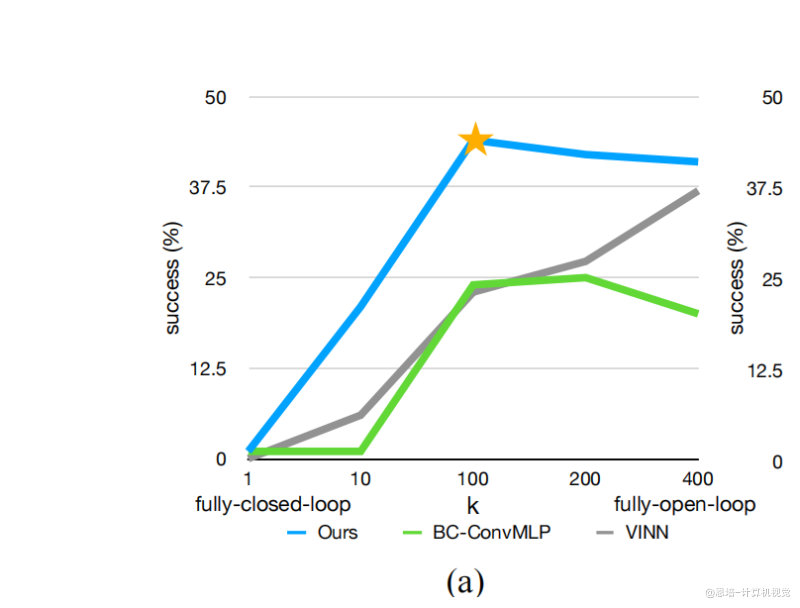
| Chunk Size (k) | 成功率表现 | 特点 |
|---|---|---|
| k=1 | 1% | 传统单步预测,复合误差严重 |
| k=10 | 12% | 轻微改善 |
| k=50 | 35% | 显著提升 |
| k=100 | 44% | 最佳性能 |
| k=200 | 40% | 性能轻微下降 |
| k=400 | 24% | 过度开环,缺乏反应性 |
选择原则
- 太小 (k<50):复合误差仍然明显
- 适中 (k=100):平衡了误差缓解和反应性
- 太大 (k>200):接近开环控制,失去闭环反馈能力
2.4 与传统方法对比
单步预测的局限
# 传统BC方法的问题
t=1: predict(obs₁) → action₁ (小误差)
t=2: predict(obs₂) → action₂ (obs₂已经偏离训练分布)
t=3: predict(obs₃) → action₃ (误差进一步累积)
...
结果: 机器人"迷失"在未见过的状态空间
Action Chunking 的优势
# ACT方法
t=1: predict(obs₁) → [action₁, action₂, ..., action₁₀₀]
# 执行100步后重新观测
t=101: predict(obs₁₀₁) → [action₁₀₁, action₁₀₂, ..., action₂₀₀]
# 大幅减少累积误差的机会
2.5 处理非马尔可夫行为
参考附录二:附录二:马尔可夫 vs 非马尔可夫行为详解
人类演示中的问题
- 暂停行为:人类在演示中会暂停思考
- 时序相关干扰:行为不仅依赖状态,还依赖时间步
- 单步策略难以建模:
无法捕捉这种时序依赖
Action Chunking 的解决方案
- 时序上下文:k 步序列包含了时序信息
- 行为连贯性:一个 chunk 内的动作保持连贯
- 减少暂停影响:暂停行为被"稀释"在 chunk 中
3. 时序集成 (Temporal Ensembling)
3.1 WHY - 为什么需要?
3.1.1 Action Chunking 的朴素实现问题
- 离散执行策略
# 朴素的Action Chunking实现
def naive_chunking():
for t in range(0, episode_length, k): # 每k步执行一次
obs = get_observation(t) # 获取观测
action_chunk = policy(obs) # 预测k步动作
for i in range(k):
execute(action_chunk[i]) # 逐步执行
# 问题:下一个chunk与当前chunk完全断开!
- 核心问题分析
- 突然的信息更新:每 k 步才融入新的环境观测
- 动作不连续:相邻 chunk 之间可能存在跳跃
- 响应延迟:环境变化后需要等待 k 步才能响应
3.1.2 实际任务中的问题表现
- 开调料杯任务示例
时刻0-99: 基于初始观测的动作序列
时刻100: 突然基于新观测重新规划
结果: 机器人动作出现"跳跃",杯子可能掉落
- 插电池任务示例
Chunk 1: [抓取电池] - 基于t=0时的观测
Chunk 2: [插入电池] - 基于t=100时的观测
问题: 如果电池在执行过程中位置发生微调,
新chunk可能基于过时信息规划动作
3.1.3 对精细操作的影响
- 精度要求高:毫米级误差导致任务失败
- 实时反馈需要:需要持续根据视觉反馈调整
- 平滑性要求:突然的动作变化会产生冲击力
3.2 HOW - 如何实现?
3.2.1 核心思想:重叠预测
从离散切换到连续融合
# 原始方法:离散切换
t=0: 预测 [a_0, a_1, a_2, ..., a_99]
t=100: 预测 [a_100, a_101, a_102, ..., a_199]
# Temporal Ensembling:重叠预测
t=0: 预测 [a_0, a_1, a_2, ..., a_99]
t=1: 预测 [a_1, a_2, a_3, ..., a_100]
t=2: 预测 [a_2, a_3, a_4, ..., a_101]
...
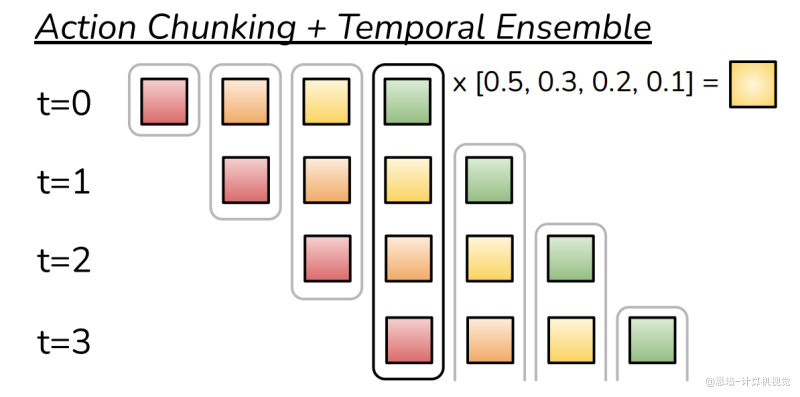
3.2.2 具体实现算法——加权平均
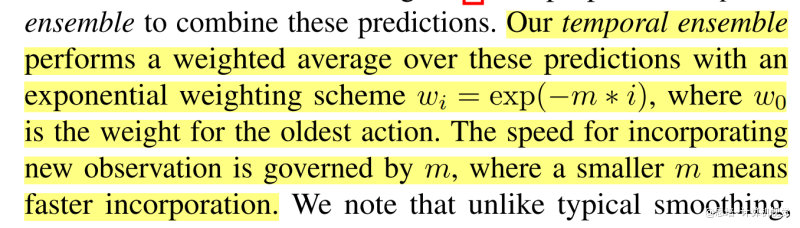
我们的时间集成使用指数加权方案对这些预测执行加权平均:
,其中 是第一个动作的权重。
论文中权重计算公式:
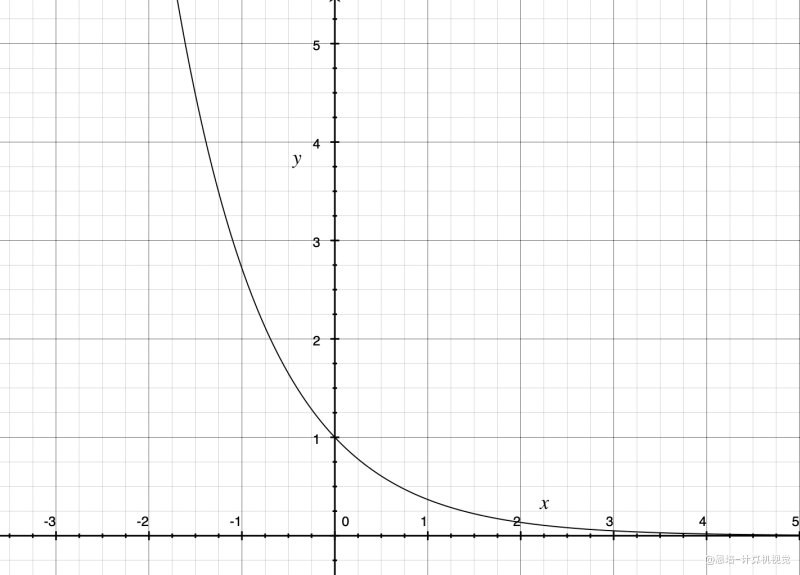
:第 个预测的权重值 :衰减速率参数 :预测的"时间点"(0=最新,1=1 步前,2=2 步前...)
权重的含义:
- 最新预测(i=0):权重最大,影响最大
- 较旧预测(i=1,2,3...):权重递减,影响逐渐减小
- 很旧预测:权重接近 0,几乎不影响最终结果
实际原作代码中的具体实现如下
# 模型根据当前观测,推理得到一批actions
all_actions = policy(qpos, curr_image)
# 将当前时间步的动作预测存储到all_time_actions张量中
all_time_actions[[t], t:t+num_queries] = all_actions
# 获取当前时间步t的所有动作预测
actions_for_curr_step = all_time_actions[:, t]
# 筛选出有效的动作预测(非零值)
actions_populated = torch.all(actions_for_curr_step != 0, axis=1)
actions_for_curr_step = actions_for_curr_step[actions_populated]
# 设置指数衰减的系数k
k = 0.01
# 计算指数衰减权重:较早的预测权重较小,较新的预测权重较大
exp_weights = np.exp(-k * np.arange(len(actions_for_curr_step)))
# 归一化权重,使所有权重之和为1
exp_weights = exp_weights / exp_weights.sum()
# 将numpy数组转换为cuda张量并增加维度
exp_weights = torch.from_numpy(exp_weights).cuda().unsqueeze(dim=1)
# 计算加权平均的最终动作
raw_action = (actions_for_curr_step * exp_weights).sum(dim=0, keepdim=True)
这个算法的核心思想是:
- 收集不同时间步对当前时间步 t 的动作预测
- 使用指数衰减函数给这些预测分配权重,使得较新的预测有更高的权重
- 归一化这些权重(确保它们的总和为 1)
- 计算加权平均得到最终的动作
用数学公式表示为:
其中:
-
是时间步 t 的最终动作 -
是第 i 个动作预测 -
是归一化的权重 np.arange(len(actions_for_curr_step))生成的是从 0 开始的序列,所以这里是 -
是衰减系数
这种方法通过综合考虑多个时间步的预测,提高了动作预测的稳定性和准确性。
4. 网络架构
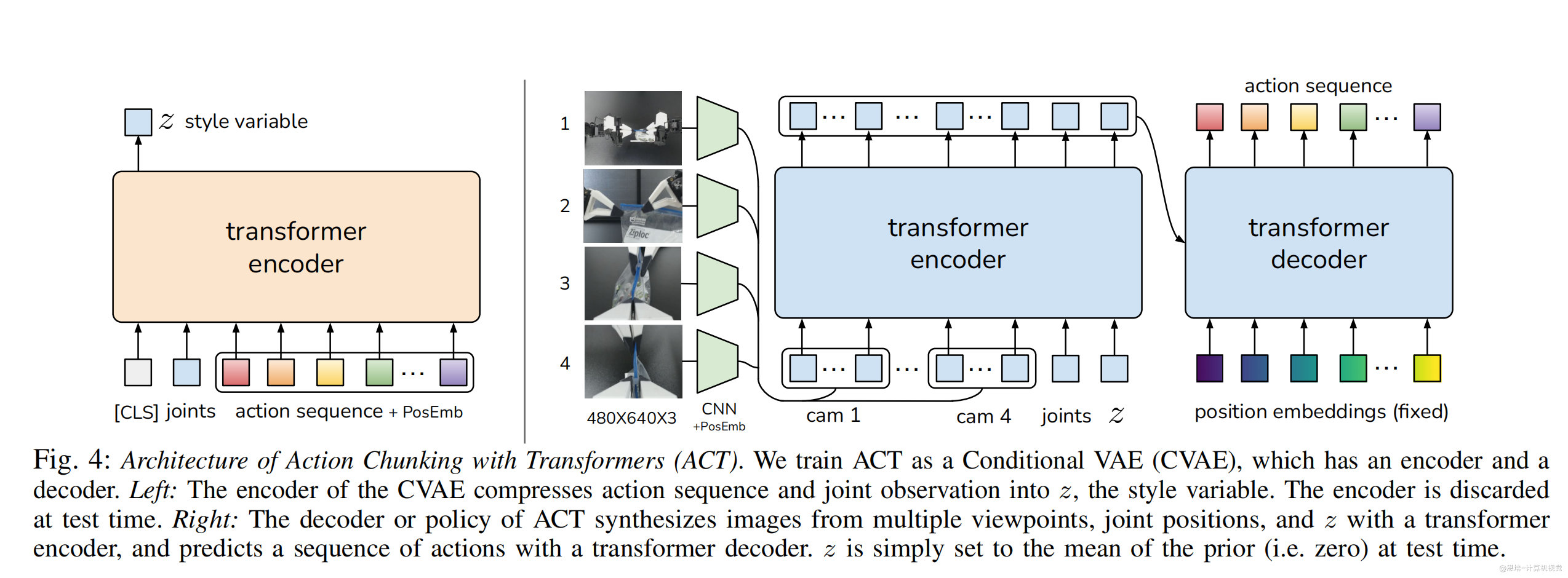
基于 Transformer 的动作分块(ACT)架构,将 ACT 训练为条件变分自编码器(CVAE),它包含一个编码器和一个解码器。
左侧:CVAE 的编码器将动作序列和关节观测压缩为风格变量 z。编码器在测试时被丢弃。
右侧:ACT 的解码器或策略使用 Transformer 编码器融合来自多个视角的图像、关节位置和 z,并通过 Transformer 解码器预测动作序列。在测试时,z 简单地设置为先验分布的均值(即零)。
4.1 整体架构概览
ACT 采用**条件变分自编码器(Conditional VAE)**架构:
请先学习:附录三、条件变分自编码器(CVAE)
- 编码器(Encoder):仅在训练时使用,用于推断风格变量 z
- 解码器(Decoder):实际的策略网络,用于预测动作序列
设计理念
- 编码器:学习如何从人类演示中提取"风格信息"
- 解码器:学习如何根据观测和风格生成动作序列
- 测试时:丢弃编码器,解码器独立工作
4.2 网络架构详细设计
4.2.1 CVAE 编码器架构
4.2.1.1 输入组成
编码器接收三个输入:
- [CLS] token:可学习的特殊标记(类似 BERT)
- 当前关节位置:14 维向量(双臂各 7 个关节)
- 目标动作序列:k×14 维张量(k 步的关节位置目标)
4.2.1.2 处理流程
-
嵌入投影:
- 关节位置通过线性层投影到 512 维
- 动作序列通过另一线性层投影到 512 维
- [CLS] token 是直接学习的 512 维向量
-
序列构建:
- 形成长度为(k+2)的输入序列
- 每个元素都是 512 维向量
-
Transformer 编码:
- 使用 4 层 Transformer 编码器
- 自注意力机制融合所有信息
-
风格变量推断:
- 取[CLS] token 对应的输出特征
- 通过线性层预测 z 的均值和方差
- z 是 32 维的对角高斯分布
4.2.2 CVAE 解码器架构(策略网络)
4.2.2.1 输入处理
解码器处理多模态输入:
图像处理流程:
-
ResNet18 骨干网络:
- 4 个 480×640×3 的 RGB 图像
- 每个图像 →15×20×512 特征图
- 展平为 300×512 的特征序列
-
空间位置编码:
- 添加 2D 正弦位置编码
- 保持空间结构信息
-
多视角融合:
- 4 个摄像头的特征序列拼接
- 总计 1200×512 的图像特征序列
其他输入处理:
- 当前关节位置:线性投影到 512 维
- 风格变量 z:线性投影到 512 维
4.2.2.2 Transformer 架构
Transformer 架构复习,《Python 0 基础趣味 CV 计算机视觉》老学员可以参考
-
编码器部分:
- 4 层 Transformer 编码器
- 输入:1202×512(图像 1200 + 关节 1 + 风格 1)
- 功能:多模态信息融合
-
解码器部分:
- 7 层 Transformer 解码器
- Query:固定的正弦位置编码(k×512)
- Key/Value:来自编码器输出
- 交叉注意力机制生成动作序列
4.2.2.3 输出生成
- 解码器输出:k×512 维特征
- 动作预测:通过 MLP 投影到 k×14 维
- 最终输出:k 步的关节位置目标
4.3 训练流程 (Training Pipeline)
4.3.1 整体流程概览
Step 1: 数据采样 (Sample Data)

从演示数据集中采样训练批次:
- 输入观测:4 个 RGB 图像 (4×480×640×3) + 关节位置 (14 维)
- 目标动作序列:k×14 维的关节位置序列
- 批次组织:按 batch size 组织数据
Step 2: 风格变量推断 (Infer z)
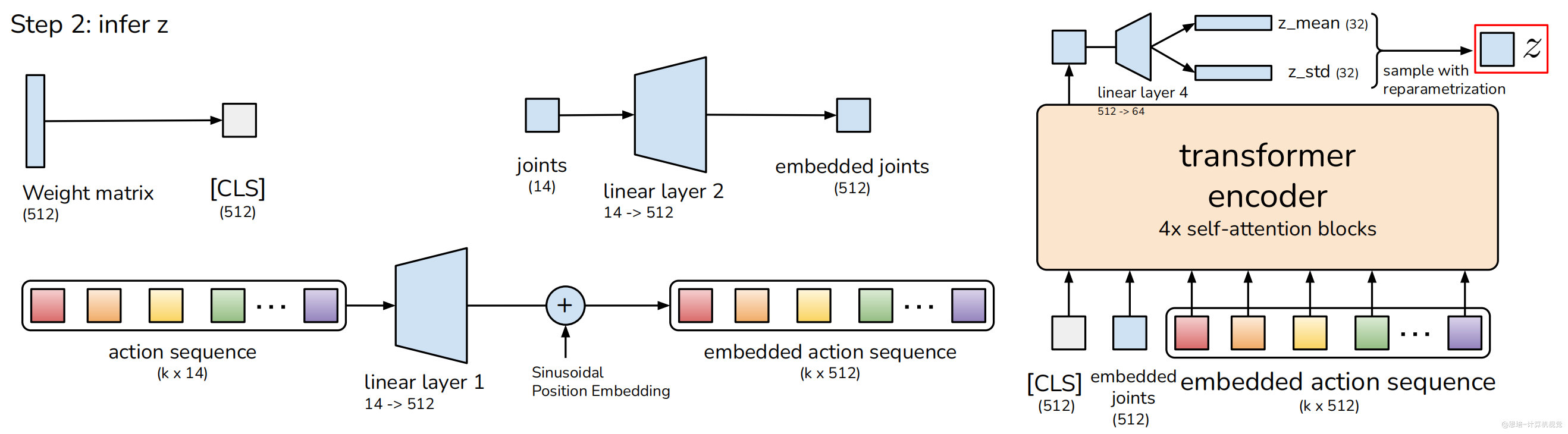
通过 CVAE 编码器推断风格变量:
- 编码器输入:
- [CLS] token (512 维)
- 当前关节位置 (14→512 维投影)
- 动作序列 (k×14→k×512 维投影)
- Transformer 编码:4 层自注意力块处理
- 输出分布:z 的均值和标准差 (各 32 维)
- 采样:使用重参数化技巧采样 z
Step 3: 动作序列预测 (Predict Action Sequence)
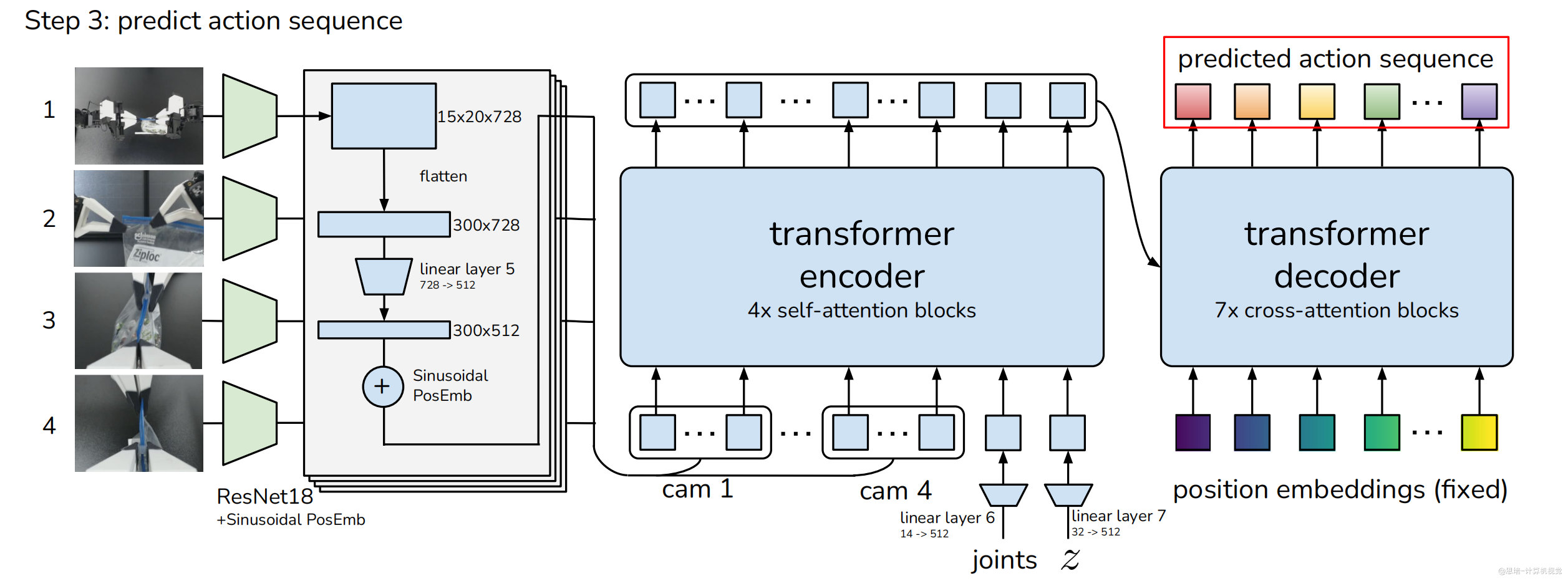
通过 CVAE 解码器生成动作预测:
- 图像处理:
- 4 个摄像头图像通过 ResNet18
- 输出 4×300×512 的特征序列
- 添加正弦位置编码
- 多模态融合:
- Transformer 编码器融合图像、关节、风格信息
- 输入序列长度:1202 (图像 1200 + 关节 1 + 风格 1)
- 序列生成:
- Transformer 解码器通过交叉注意力生成
- 固定位置编码作为查询 (k×512)
- 输出预测动作序列 (k×14)
4.3.2 详细算法流程
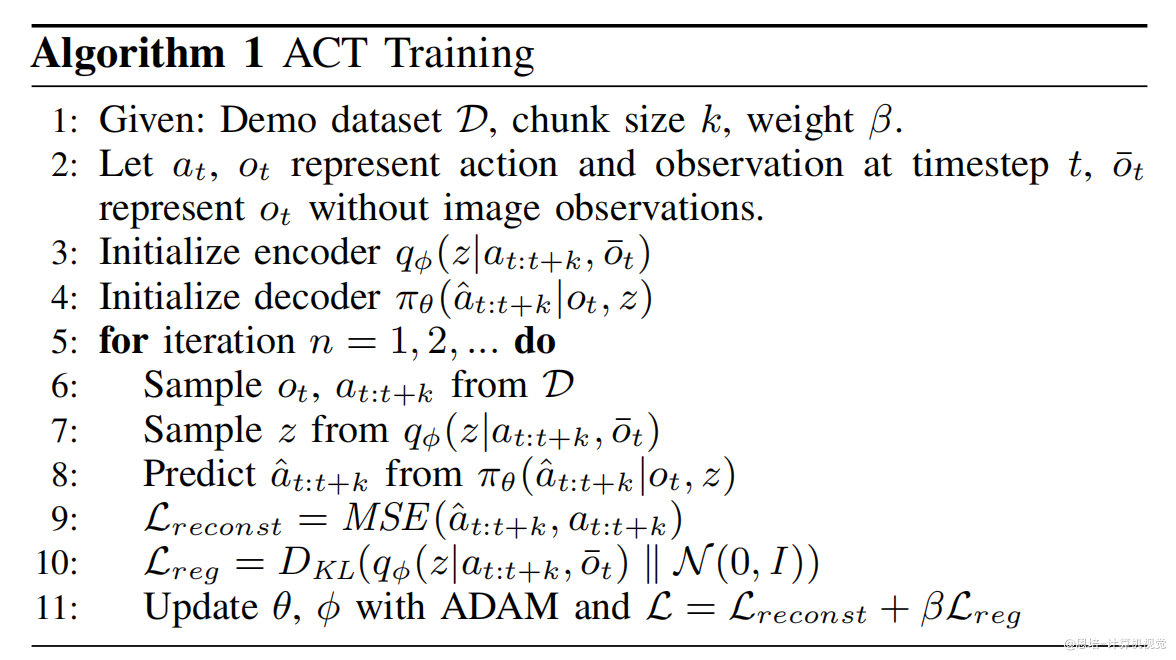
参数定义与初始化:
第 1 步:给定参数
-
演示数据集
:包含人类演示的观测-动作对 观测(Observation)
: - 图像:4 个摄像头的 RGB 图像
- 关节角度:机械臂当前关节位置(14 维)
动作对(Action)
: - Ground Truth:未来 k 步的关节角度命令(来自人类演示)
数据关系:当前观测 → 预测未来 k 步动作序列
-
块大小
:每次预测的动作序列长度 -
权重
:正则化项的平衡权重
第 2 步:符号定义
:时刻 t 的动作 :时刻 t 的完整观测(包含图像 + 关节位置) :时刻 t 的简化观测(仅关节位置,不含图像)
第 3 步:初始化编码器
-
:编码器网络 编码器不使用图像的设计体现了 ACT 的核心思想:
- 风格与内容分离:风格存在于动作模式中,内容存在于环境状态中
- 效率优先:避免不必要的计算复杂度
- 功能专业化:每个组件专注于特定类型的信息处理
-
功能:根据动作序列和简化观测推断风格变量 z 的分布
-
参数
:编码器的可学习参数
第 4 步:初始化解码器
:解码器网络(策略网络) - 功能:根据完整观测和风格变量预测动作序列
- 参数
:解码器的可学习参数
训练循环:
第 5 步:开始训练迭代
:训练轮次计数
第 6 步:数据采样
- 从数据集
中采样: :当前时刻的观测(4 个 RGB 图像 + 14 维关节位置) :从时刻 t 开始的 k 步动作序列
第 7 步:风格变量采样
- 编码器推断:
- 输入:真实动作序列 + 简化观测
- 输出:风格变量 z 的采样值
- 技术:使用重参数化技巧进行可微分采样
第 8 步:动作序列预测
- 解码器预测:
- 输入:完整观测 + 采样的风格变量
- 输出:预测的 k 步动作序列
第 9 步:计算重建损失
- 功能:衡量预测动作与真实动作的差异
- 损失类型:均方误差(论文中实际使用 L1 损失)
第 10 步:计算正则化损失
- 功能:KL 散度,使编码器输出的 z 分布接近标准正态分布
:标准多元正态分布(均值 0,协方差矩阵为单位矩阵)
第 11 步:参数更新
- 优化器:ADAM
- 总损失:
- 更新参数:
(解码器)和 (编码器) 作用:平衡重建精度和风格变量的正则化
4.3.3 训练流程总结
数据流向
演示数据 → 编码器推断风格 → 解码器预测动作 → 计算损失 → 更新参数
关键特点
- 联合训练:编码器和解码器同时训练
- CVAE 结构:条件变分自编码器框架
- 重参数化:保证采样过程可微分
- 双重损失:重建损失确保预测准确,正则化损失防止过拟合
训练目标
- 编码器学习:如何从演示中提取行为风格
- 解码器学习:如何根据观测和风格生成合适的动作序列
- 整体目标:学会在测试时仅用观测生成高质量的动作序列
数学表达式汇总
- 编码器分布:
- 解码器策略:
- 重建损失:
- 正则化损失:
- 总损失:
4.3 推理流程 (Inference Pipeline)
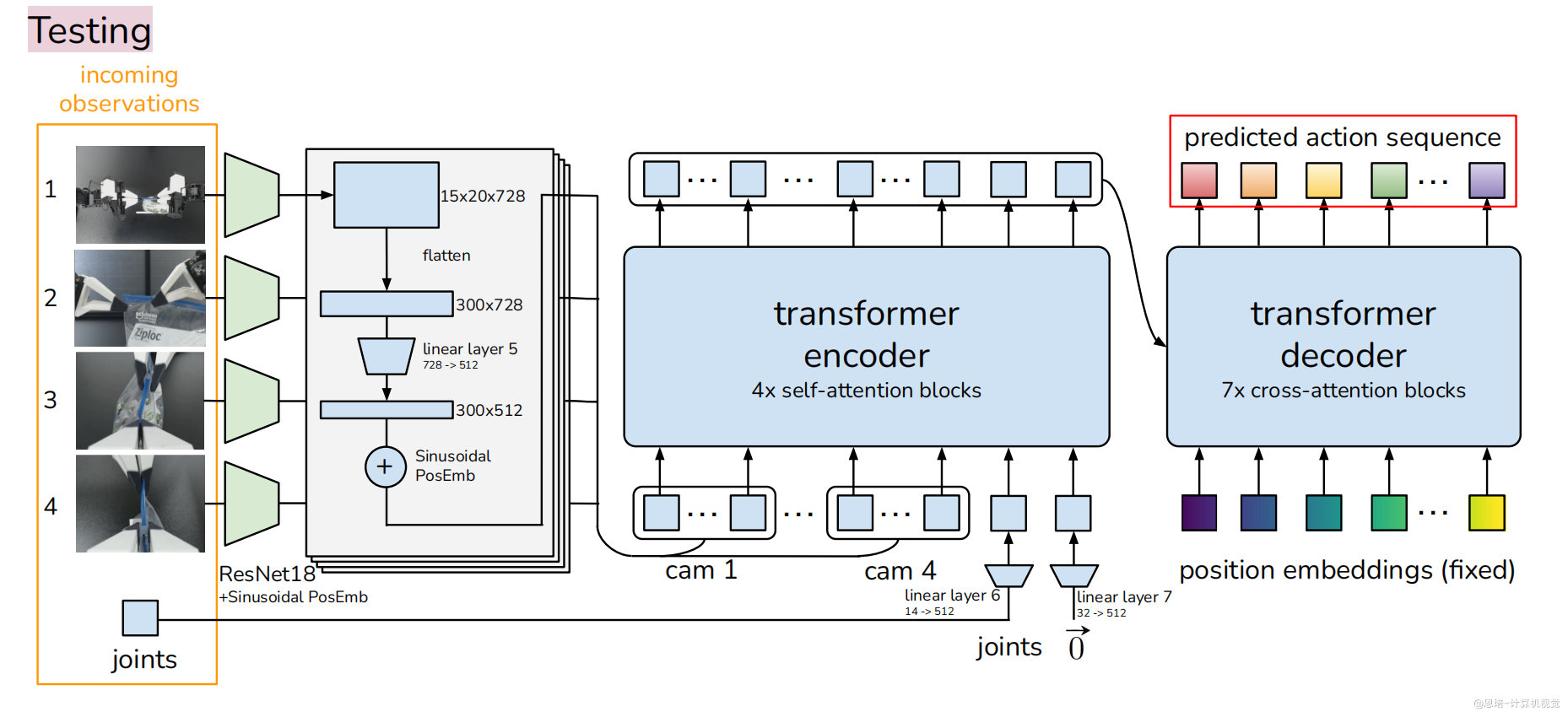
4.3.1 整体流程概览
网络简化
- 移除编码器:测试时不需要风格推断
- 固定风格变量:z=0 (使用先验分布均值)
- 仅保留解码器:作为确定性策略网络
推理步骤
- 输入观测:当前 4 个 RGB 图像 + 关节位置
- 特征提取:与训练时相同的图像和关节处理
- 序列生成:解码器直接输出 k 步动作预测
- 时序集成:对重叠预测进行加权平均
4.3.2 详细算法流程
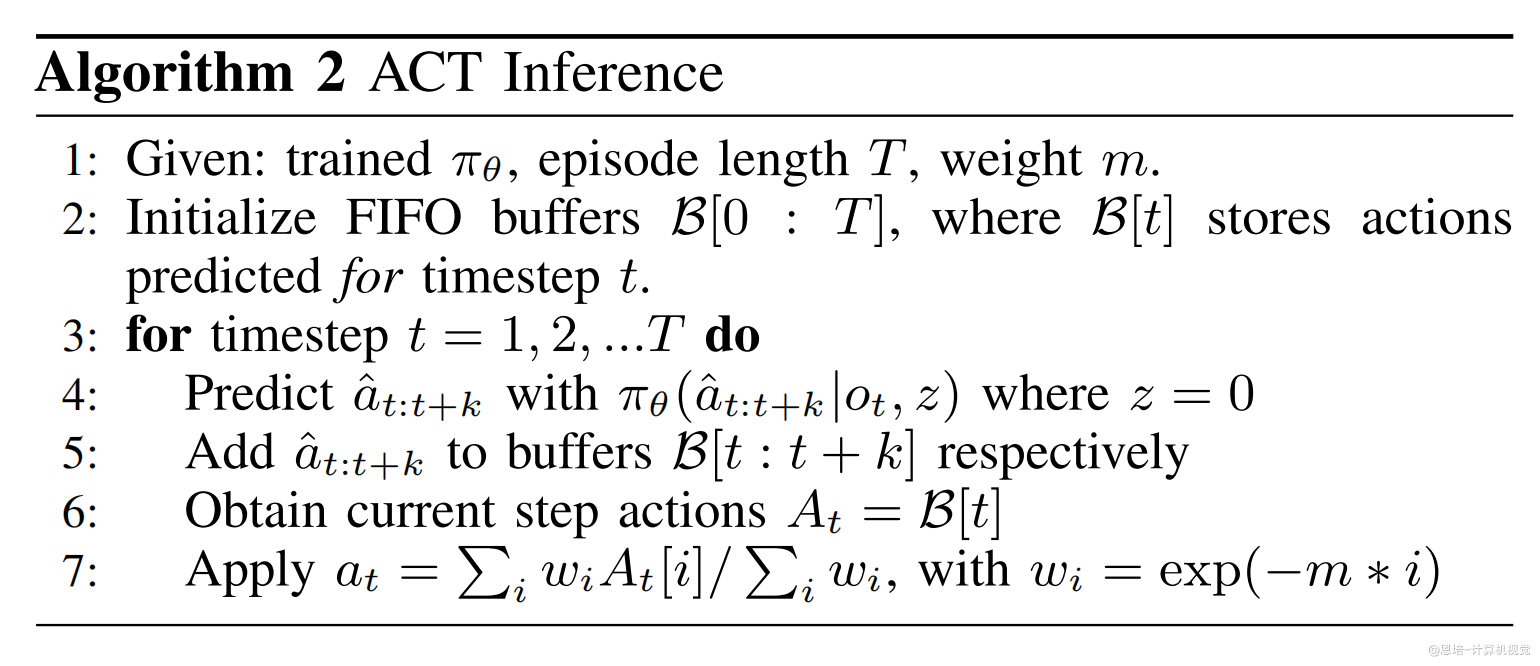
参数定义与初始化
第 1 步:给定参数
- 训练好的策略
:已完成训练的解码器网络(编码器已移除) - 任务时长
:完整任务执行的总时间步数 - 权重
:时序集成中的衰减参数,控制新旧预测的相对权重
第 2 步:初始化缓冲区系统
- FIFO 缓冲区
:先进先出的环形缓冲区数组 :存储所有"预测在时刻 执行的动作" - 功能:管理重叠的动作预测,实现时序集成
推理循环
第 3 步:开始时序推理
:按时间步顺序执行任务
第 4 步:策略预测
- 输入观测
:当前时刻的完整观测(4 个 RGB 图像 + 14 维关节位置) - 固定风格变量:
(使用先验分布的均值,移除随机性) - 输出:从时刻
开始的 步动作序列预测
第 5 步:缓冲区更新
- 将
分别添加到缓冲区 - 分配预测:将
步预测分别添加到对应时刻的缓冲区 , ,..., - 重叠积累:多个预测可能对同一时刻产生不同的动作建议
第 6 步:获取当前时刻动作集合
- 功能:提取所有针对当前时刻
的动作预测 - 内容:可能包含来自不同历史时刻预测的多个动作值
第 7 步:时序集成与执行
- 权重计算:
含义:预测的"年龄"(0 表示当前预测,1 表示 1 步前的预测,依此类推) - 加权平均:越新的预测权重越高,越旧的预测权重越低
- 最终执行:
作为当前时刻的实际执行动作
原著代码实现:
if config['policy_class'] == "ACT":
if t % query_frequency == 0:
all_actions = policy(qpos, curr_image)
if temporal_agg:
all_time_actions[[t], t:t+num_queries] = all_actions
actions_for_curr_step = all_time_actions[:, t]
actions_populated = torch.all(actions_for_curr_step != 0, axis=1)
actions_for_curr_step = actions_for_curr_step[actions_populated]
k = 0.01
exp_weights = np.exp(-k * np.arange(len(actions_for_curr_step)))
exp_weights = exp_weights / exp_weights.sum()
exp_weights = torch.from_numpy(exp_weights).cuda().unsqueeze(dim=1)
raw_action = (actions_for_curr_step * exp_weights).sum(dim=0, keepdim=True)
else:
raw_action = all_actions[:, t % query_frequency]
4.3.3 推理流程总结
数据流向
当前观测 → 策略预测k步动作 → 更新缓冲区 → 时序集成 → 执行动作
FIFO 缓冲区管理
- 多预测存储:每个时刻可能有多个来源的动作预测
- 自动更新:新预测自动添加到相应时刻
- 内存高效:固定大小的环形缓冲区
时序集成策略
- 指数衰减权重:
值越大:更偏重新预测 值越小:新旧预测权重更平衡
- 加权平均:所有预测按权重融合
- 平滑执行:避免动作突变,提高执行稳定性
推理特点
- 确定性执行:
移除随机性,保证可重复性 - 实时预测:每个时刻都生成新的
步预测 - 重叠融合:多个预测为同一时刻提供不同建议
- 自适应调整:新观测信息不断融入决策过程
与训练的差异
| 方面 | 训练阶段 | 推理阶段 |
|---|---|---|
| 网络结构 | 编码器 + 解码器 | 仅解码器 |
| 风格变量 | 从数据推断 | 固定为 0 |
| 输入信息 | 观测 + 真实动作(主臂角度) | 仅当前观测 |
| 输出处理 | 直接计算损失 | 时序集成后执行 |
| 计算模式 | 批处理训练 | 实时单步推理 |
附录
附录一、策略(Policy)
策略就是"智能体的行为准则":告诉机器人/AI 系统在特定情况下应该做什么的决策函数。
如果你有《趣味 AI 课程》,请复习一下“强化学习玩马里奥”一节,可以看到也有 Policy
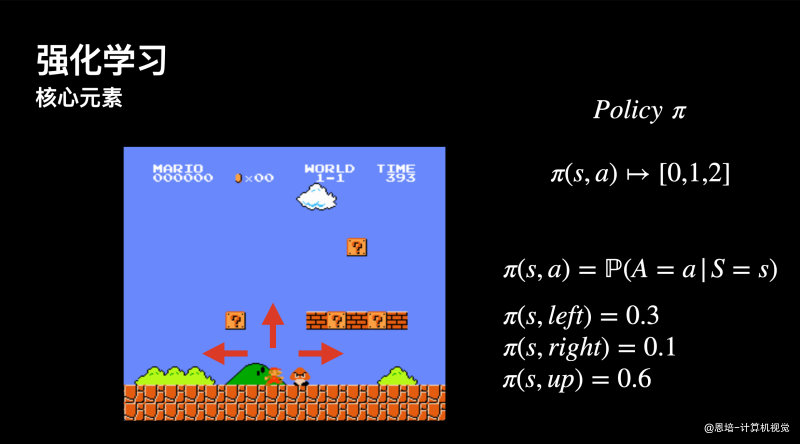
- 核心定义
- 策略 = 在给定情况下,应该采取什么行动的决策规则
- 数学表示:
"在状态 s 下选择动作 a 的概率"
- 历史发展脉络
| 时期 | 领域 | 策略含义 | 特点 |
|---|---|---|---|
| 1940s | 博弈论 | 完整行动计划 | 静态、预设 |
| 1950s | 控制论 | 控制法则 | 动态反馈、数学化 |
| 1980s | 强化学习 | 状态 → 动作映射 | 概率化、可学习 |
| 2000s | 机器人学习 | 行为决策模型 | 端到端、神经网络 |
- 通用模式
策略的本质
策略 = 情境 → 行动 的映射关系
工作流程
1. 感知环境 (观察状态s)
↓
2. 查询策略 (π函数)
↓
3. 选择动作 (输出a)
↓
4. 执行行动
↓
5. 观察结果 (可能更新策略)
- 在机器人学习中的具体含义
比如在 ACT 中的策略:
输入:当前看到的环境情况
输出:接下来k步要执行的动作序列
功能:告诉机器人"在这种情况下应该怎么做"
- 为什么策略概念重要?
- 统一框架:为不同领域的决策问题提供通用语言
- 数学化:可以用严格数学描述和分析
- 可优化:可以通过学习算法不断改进
- 可实现:可以用程序代码具体实现
- 可评估:可以量化策略的好坏
应用广泛性
博弈 → 控制 → 机器学习 → 机器人 → 自动驾驶 → 推荐系统 → ...
附录二:马尔可夫 vs 非马尔可夫行为详解
2.1 基本概念
马尔可夫性质
-
定义:未来状态只依赖于当前状态,与历史无关
-
数学表达:
-
例子——下棋游戏:
- 当前棋盘状态包含了所有决策所需信息
- 不需要知道具体是怎么走到这个棋盘状态的
- 下一步最优走法只看当前棋盘
非马尔可夫行为
-
定义:未来状态/动作依赖于历史信息,不仅仅是当前状态
-
数学表达:
-
例子——股票投资:
- 股票当前价格:100 元
- 但投资决策还需要知道:
- 是从 90 元涨到 100 元?(上升趋势,可能继续买入)
- 还是从 110 元跌到 100 元?(下降趋势,可能卖出)
- 相同的当前状态,不同的历史导致不同的决策
2.2 机器人学习中的例子(ACT 论文)
2.2.1 马尔可夫任务示例
抓取固定物体
状态:机器人手臂位置 + 物体位置 + 夹爪状态
动作:只需根据当前状态决定下一步动作
历史:不重要,当前几何关系决定一切
为什么是马尔可夫的?
- 物体位置固定,环境静态
- 最优动作只依赖当前的空间几何关系
- 历史轨迹不影响决策
2.2.2 非马尔可夫任务示例
例子 1:人类演示中的"停顿"行为
场景:开调料杯任务

# 时间序列演示数据
t=10: 右手接近杯子 (正常速度)
t=11: 右手接近杯子 (正常速度)
t=12: 右手停顿 (速度=0) # 人类在思考/观察
t=13: 右手停顿 (速度=0) # 人类在思考/观察
t=14: 右手推杯子 (恢复动作)
马尔可夫 policy 的困惑:
- 在 t=12 时刻:
state = [手臂位置A, 杯子位置B] - 在 t=14 时刻:
state = [手臂位置A, 杯子位置B](相同状态!) - 但应该采取的动作不同:
- t=12: 继续停顿
- t=14: 开始推杯子
非马尔可夫性:
- 相同的空间状态,不同的时间上下文
- 需要知道"已经停顿了多久"才能决定下一步
例子 2:渐进式调整行为
场景:插电池任务
# 人类演示轨迹
阶段1: 粗略对准电池和槽口
阶段2: 精细调整角度 (小幅震荡)
阶段3: 最终插入
状态看起来相似,但行为不同:
# 两个时刻的相似状态
时刻A: [电池位置=(10,20), 角度=45°, 接触力=0.1N]
时刻B: [电池位置=(10,20), 角度=45°, 接触力=0.1N]
# 但处于不同阶段
时刻A: 刚开始精调 → 应该继续小幅调整
时刻B: 调整了30秒 → 应该尝试插入
2.3 传统单步 Policy 的问题
单步预测的局限
# 传统BC方法
def policy(current_state):
return predict_action(current_state) # 只看当前帧
# 面临的问题
相同的current_state → 可能需要不同的action
具体失败模式
- 无限停顿问题
# 在演示数据中,人类在某状态停顿了3秒
state_pause = [hand_pos=(5,10), object_pos=(20,30)]
# 单步policy学到:在这个状态 → 动作=停顿
# 测试时:机器人可能在这个状态无限停顿
- 时序混乱问题
# 演示中的正确序列
t1: 接近物体 (慢速)
t2: 接近物体 (慢速)
t3: 接近物体 (快速) # 人类决定加速
t4: 抓取物体
# 单步policy可能学到:
在"接近物体"状态 → 随机选择慢速/快速
导致运动不连贯
2.4 Action Chunking 如何解决
- 时间窗口建模
# 传统方法
action_t = policy(state_t) # 单点决策
# Action Chunking
action_sequence = policy(state_t) # 预测未来k步
# action_sequence = [a_t, a_t+1, ..., a_t+k-1]
- 解决停顿问题
原理:在一个 chunk 内部处理时间依赖
# Chunk包含停顿→行动的完整序列
chunk_example = [
action_t=0: "接近", # 开始接近
action_t+1: "停顿", # 观察思考
action_t+2: "停顿", # 继续观察
action_t+3: "推杯子" # 执行动作
]
# 这样policy学会了"停顿多久后该行动"
- 解决协调问题
原理:chunk 内部保持动作的时序一致性
# 双手协调的chunk
bimanual_chunk = [
t: [left_hand="hold_steady", right_hand="approach"],
t+1: [left_hand="hold_steady", right_hand="fine_adjust"],
t+2: [left_hand="hold_steady", right_hand="grasp"],
t+3: [left_hand="coordinate_pull", right_hand="coordinate_pull"]
]
# 确保双手动作的时序匹配
2.5 总结
- 马尔可夫 vs 非马尔可夫对比表
| 特征 | 马尔可夫行为 | 非马尔可夫行为 |
|---|---|---|
| 决策依赖 | 仅当前状态 | 当前状态 + 历史 |
| 时序重要性 | 不重要 | 很重要 |
| 典型场景 | 静态环境抓取 | 人类演示、协调任务 |
| Policy 复杂度 | 简单 | 复杂 |
| Chunking 收益 | 小 | 大 |
- Action Chunking 的核心价值
- 将非马尔可夫问题转化为马尔可夫问题
- 在 chunk 内部处理时间依赖关系
- 保持动作序列的时序一致性
- 特别适合处理人类演示数据中的复杂时序模式
这就是为什么 ACT 在处理精细操作任务时,相比传统方法有如此显著的性能提升。
其实,上一套课《大模型 3D/6D 视觉抓取 6 轴机械臂》里面的抓取任务就属于马尔可夫,想一想,为什么?
附录三、条件变分自编码器(CVAE)
扩展阅读
相关课程(主要是生成图像生成相关):
《Python 0 基础趣味 CV 计算机视觉》
《Python 趣味 AI》
图片来源于网络
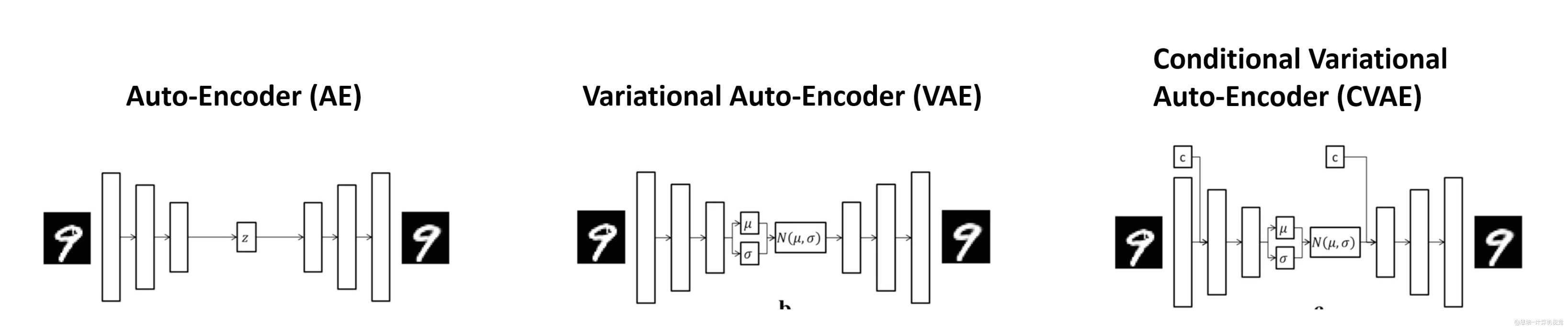
3.1 AE vs VAE vs CVAE 对比
生活例子,想象你是一个画家:
-
普通自编码器(AE):就像照着原画临摹,能画出很像的作品,但不能创作新的
-
变分自编码器(VAE):不仅能临摹,还能理解绘画的"精髓",创作出全新但合理的作品
-
条件变分自编码器(CVAE):就像一位"私人定制画家",不仅能创作新作品,还能按客户需求画画:
-
客户说"我要一朵玫瑰"→ 画出各种风格的玫瑰(写实的、印象派的、素描的...)
遗憾的是,现在文生图的控制颗粒度还没有那么好
-
3.2 标准自编码器 (AE)
目标: 学会重构输入数据
输入图像 → [编码器] → 潜在向量 → [解码器] → 重构图像
特点:
- 能很好地重构训练数据
- 无法生成新样本 - 这是关键问题!
- 原因:如果我们随机选择一个潜在向量输入解码器,很可能得到无意义的输出
如果你不了解编码器、潜在向量、解码器,请继续看:
3.2.1. [编码器] - 数据压缩过程
技术实现: 通常是多层神经网络,逐步降维
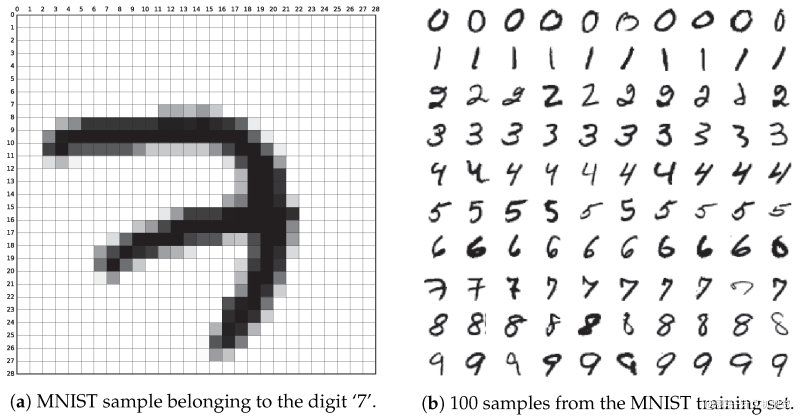
# 以MNIST为例 (28×28像素图像)
输入: 784维向量 (28×28展平)
↓ 全连接层1: 784 → 512
↓ 激活函数: ReLU
↓ 全连接层2: 512 → 256
↓ 激活函数: ReLU
↓ 全连接层3: 256 → 64
输出: 64维潜在向量
3.2.2. 潜在向量 - 压缩表示
英文表示: Latent Vector、 Latent Space 等
本质: 原始数据的低维度抽象表示
- 维度: 远小于原始数据 (64 维 vs 784 维)
- 含义: 包含重构原数据的关键信息
- 类比: 就像用几个关键词概括一篇文章
# 具体例子
原图像: [0.1, 0.8, 0.3, ..., 0.9] # 784个数字
潜在向量: [2.1, -0.5, 1.8, 0.3] # 只有4个数字(简化例子)
3.2.3. [解码器] - 数据重构过程
技术实现: 编码器的"反向"过程,逐步升维
# 解码器结构
输入: 64维潜在向量
↓ 全连接层1: 64 → 256
↓ 激活函数: ReLU
↓ 全连接层2: 256 → 512
↓ 激活函数: ReLU
↓ 全连接层3: 512 → 784
↓ 激活函数: Sigmoid (输出0-1像素值)
输出: 784维重构图像
压缩迫使模型学习数据的核心特征而非死记硬背,获得去噪、泛化能力,且压缩后的潜在空间可用于生成新样本。
简单说:**压缩=理解本质,解码=验证理解,最终目标是生成新内容。**
想象你在传纸条:
- 编码器: 把长句子压缩成几个关键词
- 潜在向量: 这几个关键词
- 解码器: 根据关键词还原出完整句子
3.2.4 具体数字示例
假设处理一个手写数字"3":
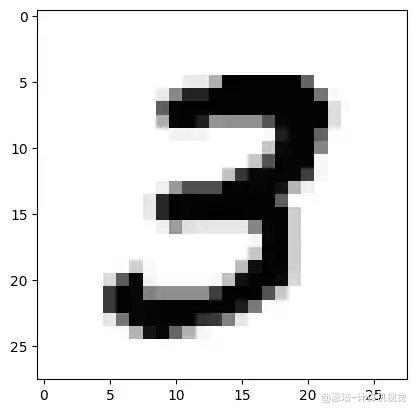
1. 输入图像: 28×28 = 784个像素值
[0.0, 0.1, 0.8, 0.9, 0.7, ..., 0.0]
2. 编码器处理:
784 → 512 → 256 → 64
3. 潜在向量 (64维):
[1.2, -0.8, 2.1, 0.5, ..., -1.1] # 这64个数字包含了"3"的核心特征
4. 解码器处理:
64 → 256 → 512 → 784
5. 重构图像: 784个像素值
[0.02, 0.09, 0.79, 0.91, 0.68, ..., 0.01] # 尽量接近原图
3.3 变分自编码器 (VAE)
目标: 既能重构,又能生成新样本
输入图像 → [编码器] → 分布参数(μ,σ) → 采样 → [解码器] → 重构图像
关键改进:
- 编码器输出概率分布(均值和方差),而不是固定值
- 可以生成新样本 - 从标准正态分布采样点输入解码器
- 使用 KL 散度确保潜在分布接近标准正态分布
比喻: 想象 AE 是"死记硬背",VAE 是"理解规律"
3.4 条件变分自编码器 (CVAE)
目标: 根据指定条件生成特定类型的样本
输入图像+标签 → [编码器] → 分布参数 → 采样+标签 → [解码器] → 重构图像
核心优势:
- 可控生成 - 想要数字"3"就能生成"3"
- 潜在空间编码风格信息(粗细、角度等),标签编码内容信息
CVAE 作为早期的生成建模框架,虽然在 ACT 中表现良好,但其生成能力相比近年来兴起的 diffusion 模型仍有显著差距。随着技术演进,后续的视觉-语言-动作(VLA)算法开始广泛采用 diffusion 机制,典型代表包括 Diffusion Policy 和 Pi0 等方法。