1.3 上位机软件使用手册
1. 上位机软件使用
1.1 软件启动
-
前往 Episode1 资料下载中心下载 Episode1 上位机软件
-
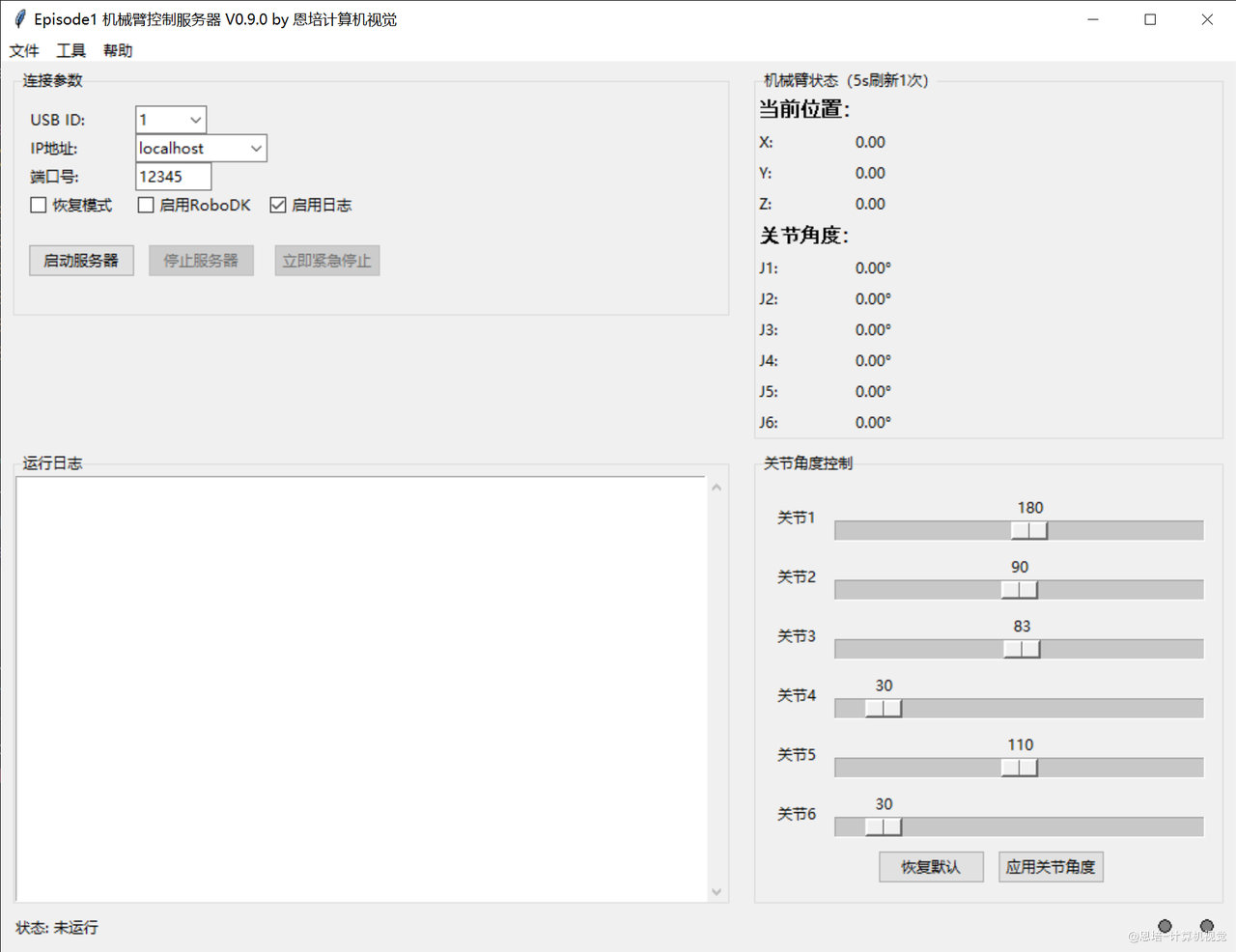
打开上位机软件,界面如下:
不同版本可能界面和功能稍有不同,下图是 V0.9.0 的
1.2 软件使用
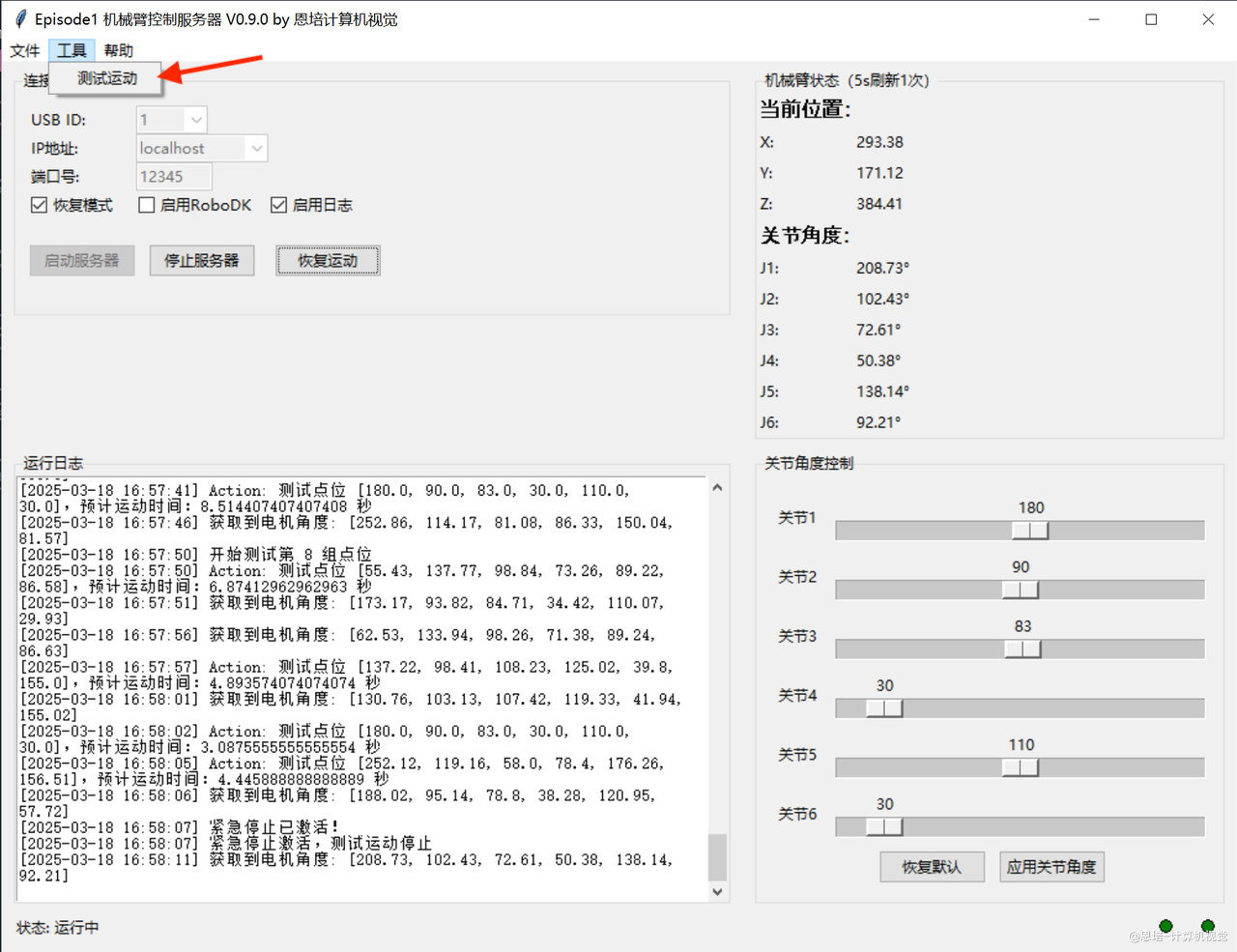
1.2.1 连接参数
- USB ID:标识 USB2CAN 转换器在电脑中的连接顺序,编号从 1 开始。支持同时连接多台机械臂,最多可扩展至 6 台。
- IP 地址:用于客户端(如 Python 代码)通过 TCP 协议连接机械臂 API 服务,提供两种模式:
- Localhost(127.0.0.1):仅限当前电脑本地访问。
- 0.0.0.0:支持局域网访问,客户端需与当前电脑处于同一网络。需要防火墙放行。
- 端口:TCP API 服务的通信端口,可自定义设置,常用于区分同一 IP 地址下的多台机械臂。
1.2.2 复选框
-
恢复模式:
-
为保证运动精度,机械臂每次重启上电后需执行回零操作,耗时约 1 分钟。
-
不勾选(默认):启动服务后,机械臂自动回零。
-
勾选(恢复模式):读取机械臂当前关节角度,直接恢复服务,无需回零。
- 适用场景:机械臂长期通电,需快速恢复服务以节省时间。
-
-
启动 RoboDK:
-
在示教模式下,可同步 RoboDK 仿真(需提前安装 RoboDK 软件)。
在 Robodk 仿真章节会有详细介绍。
-
-
启用日志:是否启用运行日志。
1.2.3 操作按钮
-
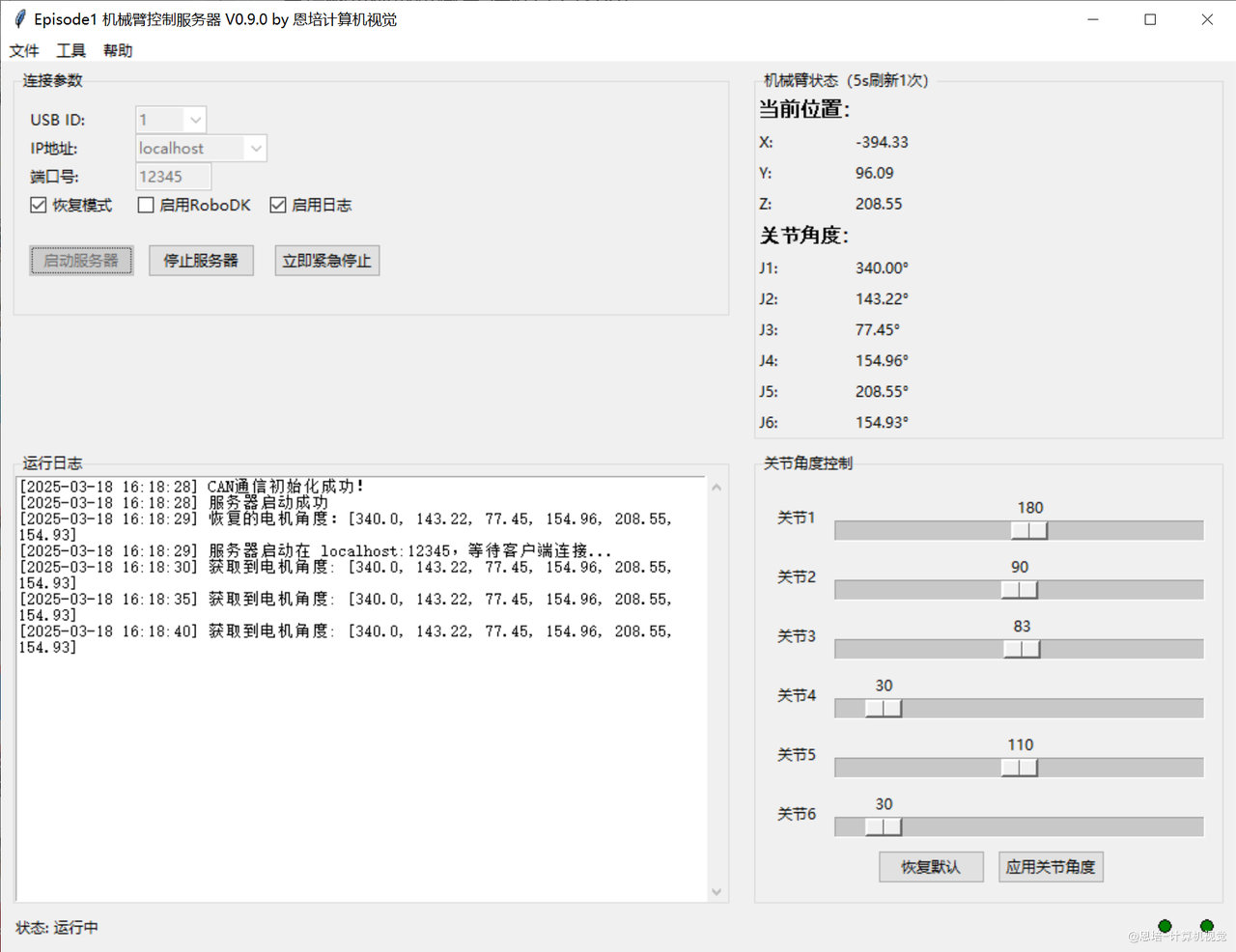
启动服务器:
- 建立与机械臂的通信,开启 TCP 协议 API 服务,允许上位机或 API 控制机械臂。
- 每 5 秒读取一次机械臂的关节角度(编码器数据)和当前位置(正运动学计算)。
-
停止服务器:
- 终止服务并断开与机械臂的通信。
- 自动启用恢复模式,以便下次快速启动。
-
立即紧急停止:
-
按下按钮:机械臂立即停止运动,并忽略后续指令。
注意:紧急停止功能不适用于舵机夹爪,操作时请注意安全。
-
恢复服务:重新启用机械臂,使其接收控制指令。
-
1.2.4 机械臂状态
启动服务器后,每 5 秒读取一次机械臂的关节角度(编码器数据)和当前位置(正运动学计算)。
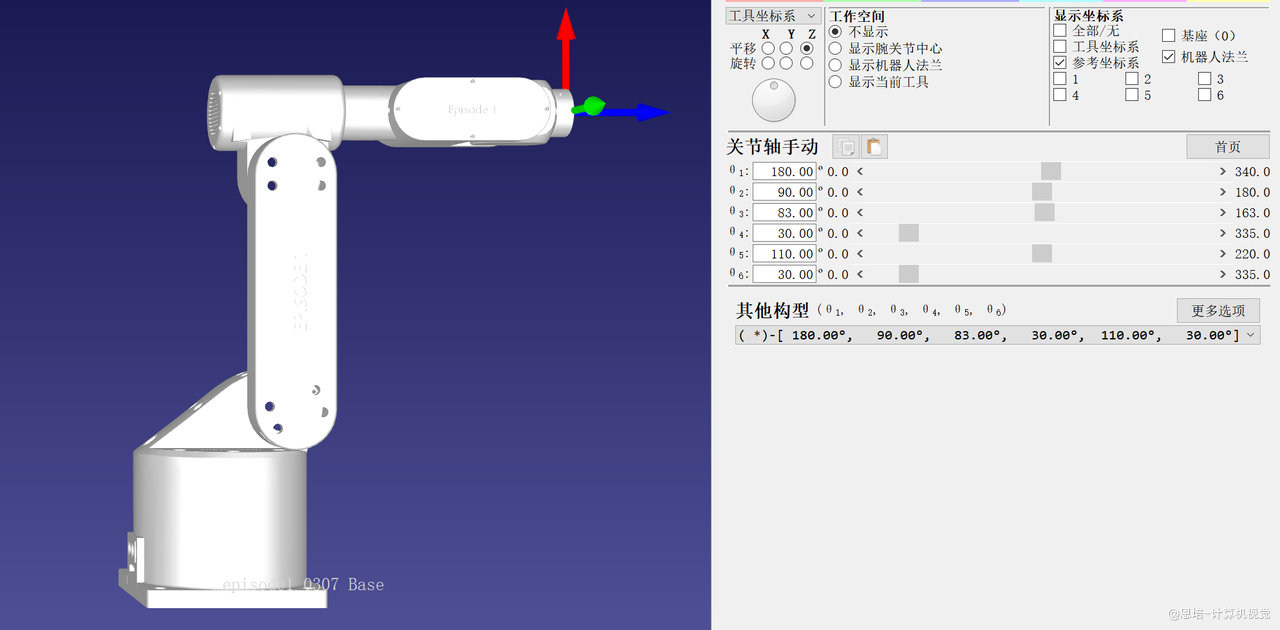
1.2.5 关节角度控制
可以在此简单控制各个关节角度运动,更多控制指令参考 SDK。
1.3 回隙说明
-
回程间隙是指减速机在正向驱动时,输出轴无法进行运动的最小间隙。间隙就是齿轮与齿轮之间的间隙,一般称作回程间隙,也称为背隙。
对于更精密的减速器,如谐波减速器,一般回隙很小或无回隙,但价格也和行星不再一个档次。
回隙主要影响绝对精度,对于重复精度影响较小。我们使用机械臂更在乎的是重复精度。
-
感受回隙:上电,再次轻轻旋转各个关节,如果更换过键、对应紧固螺钉都紧固过,仍然会发现带减速器的关节仍然会有一点点活动空间,这个便是减速器齿轮的回隙。
如果间隙较大,可能是结构松了,不是回隙问题。
-
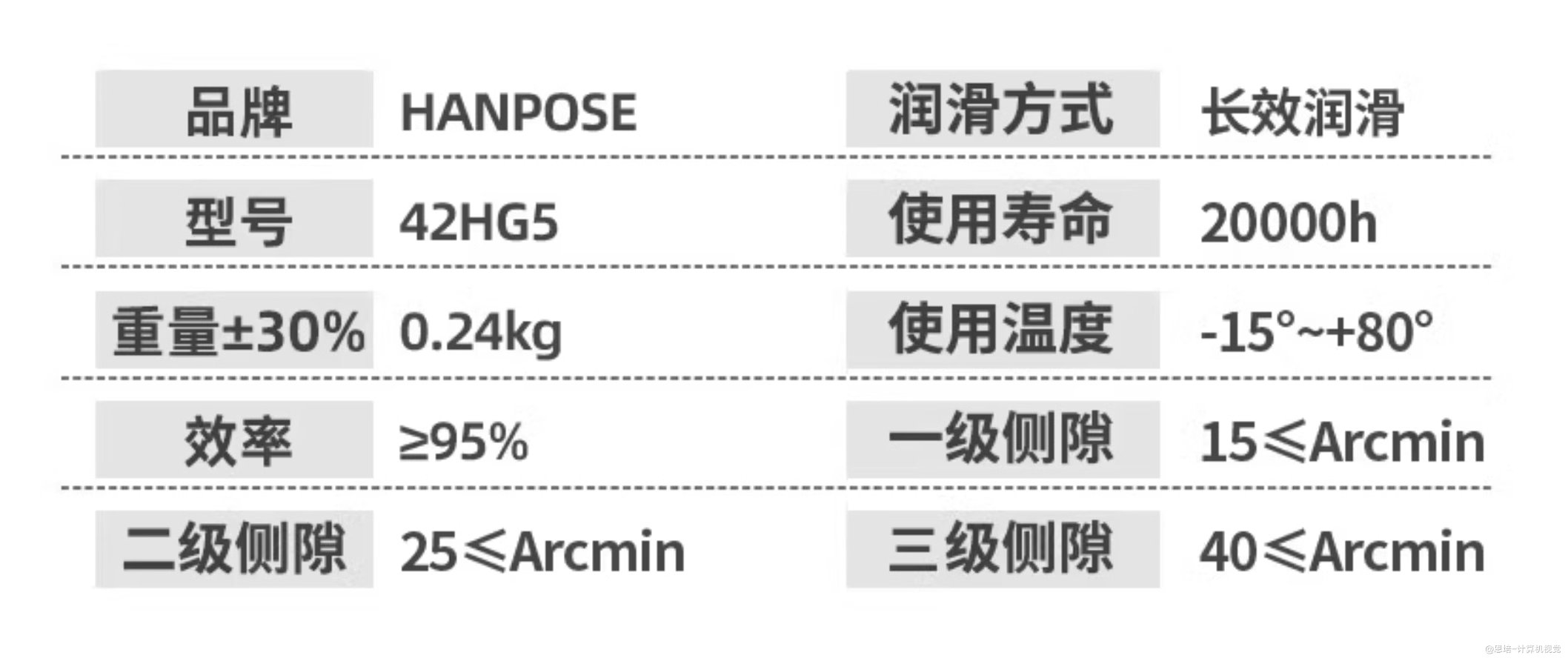
对应 hanpose 商家提供的数据如下:
-
Episode1 机械臂各关节使用减速器比例:
- 二级 25:1
- 二级 20:1
- 二级 25:1
- 一级 10:1
- 无
- 无
-
第 5、6 关节,无减速器,基本无回隙。
-
第 4 个关节,用的是一级减速器,回隙较小,影响不大。
-
第 3 个关节,实际使用中,因为上位机的回零策略,通过重力抵消,克服了回隙影响,可忽略回隙。
-
第 2 个关节,实际使用中,因为上位机的回零策略,通过重力抵消,分为两种情况:
大臂、小臂组合体重心在第二个电机轴左侧 大臂、小臂组合体重心在第二个电机轴右侧 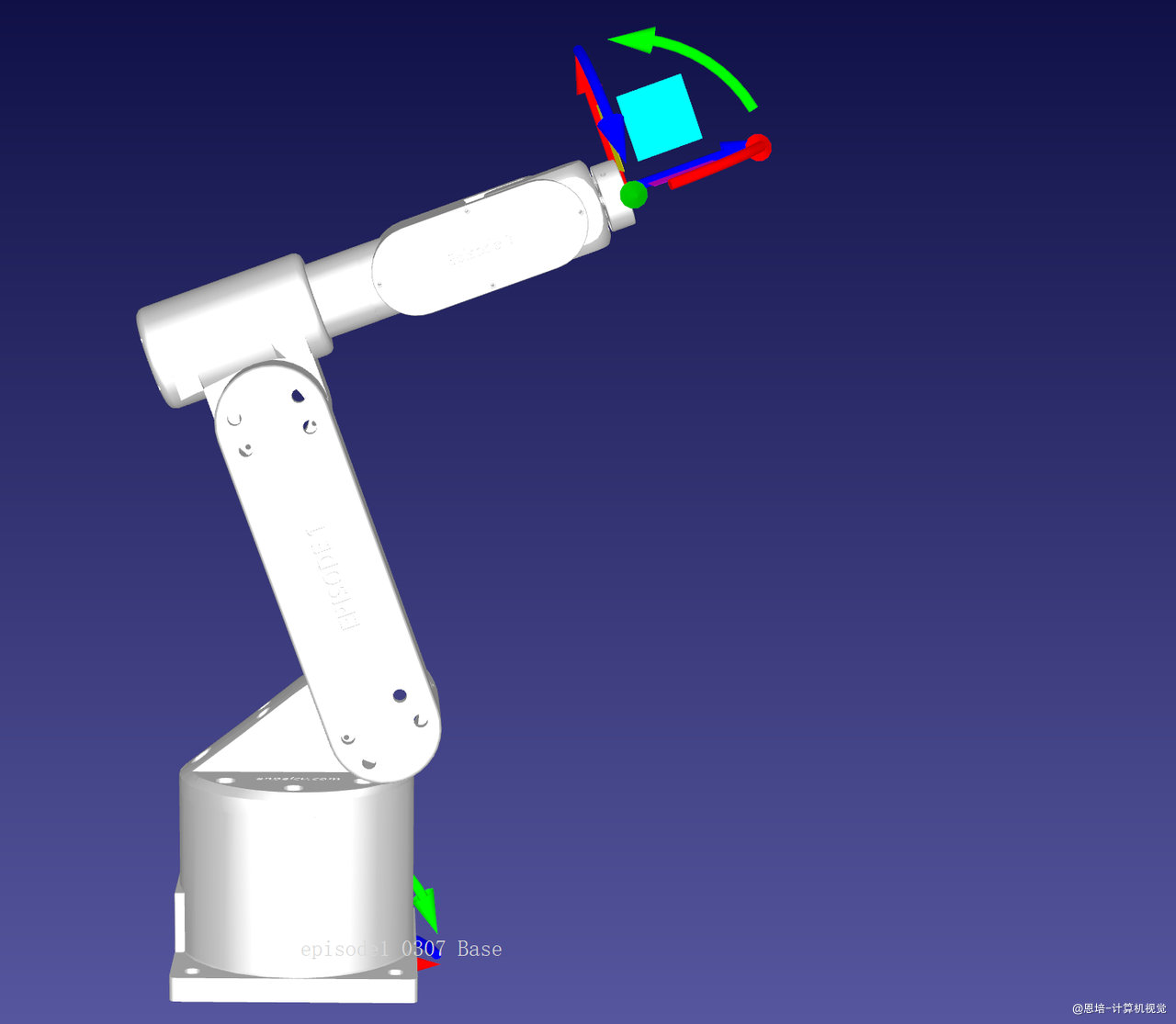
该状态会有回隙影响,尽量避免这个姿态,或者自己通过测量误差,在控制代码中补偿角度(上位机无法统一补偿,因为每台机器可能误差不同)。 通过重力抵消,已消除回隙影响,机械臂大部分都处于这种姿态。 -
特别注意:机械臂开机启动后,由图左侧状态瞬间切换到右侧状态时,你会看到机械臂会自由运动对应回隙的角度。
-
验证抵消效果:
使机械臂运动到默认姿态(第 2、3 关节分别是 90、83 度)使用角度测量仪器,可测量大臂边,和小臂旋转面,看看是不是垂直和水平。
-
-
第 1 个关节,因为回零策略,在单个方向无回隙影响,在另一个方向有回隙,可自己通过测量误差,在控制代码中补偿角度(上位机无法统一补偿,因为每台机器可能误差不同)。
-
减少回隙建议:如需尽可能减小减速器回隙影响,欢迎联系助手购买 J1 谐波减速器升级套件(需要更换第一个关节电机、减速器、法兰、相应螺钉等,底座外壳等不需要更换)。
2. 煲机
-
目的:通过连续小幅运动测试,使电机、减速器、关节充分磨合,确保机械臂运行稳定。
-
建议煲机时间:1 小时。
-
操作步骤:
-
固定机械臂底座,上电并清空周围障碍物。
-
启动上位机服务器。
-
点击“工具-测试运动”,机械臂将按预设位置不间断移动。
-
1 小时后,点击“紧急停止”或“停止服务器”结束运动。
-
很多同学还在痛苦的组装,如果你已经在煲机,请分享一下你的视频到答疑群,鼓励一下这些朋友!
恭喜你!现在,你已经学会使用上位机,赶快去: