2.9 实战任务二:单臂开关抽屉取物
有了 8.实战任务一:单臂抓取放置(ACT、SmolVLA、Pi0) 的基础,我们来实验另一个任务,这个任务更复杂一点:
我用的抽屉购买链接
- 开启抽屉
- 抓取积木,放进抽屉
- 关闭抽屉
数据采集、数据转换、可视化、训练、部署等流程都是一样的,我们用这个例子探索一下 VLA 能不能做一些更复杂的任务。
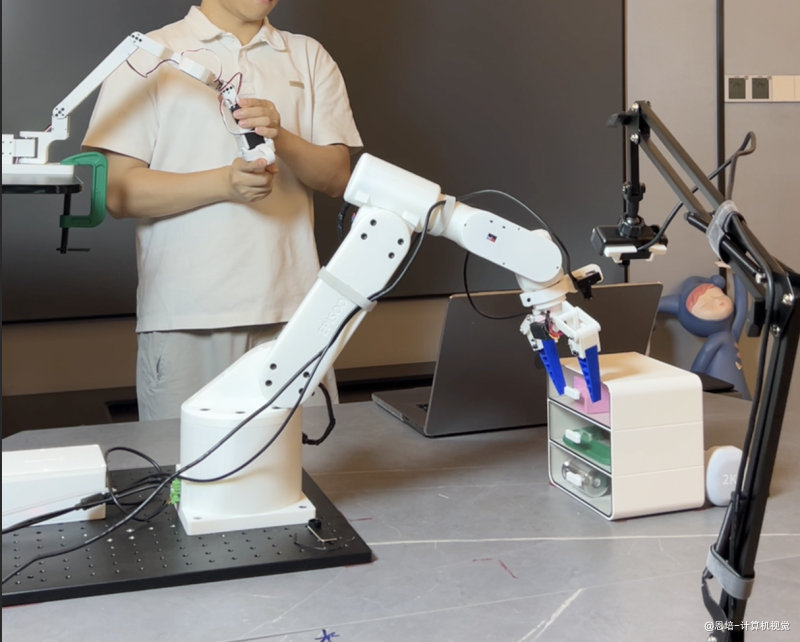
1. 遥操采集数据:
下面是我实际录制的操作画面(1X 速度),建议:
- 采集至少 80 个 Episodes
- 如果有抽屉状态比较单一,但是积木位置如果有变化,每个位置采集 10 个 Episodes
▶
2. 推理
下面所有的推理都是 1X 速度。
2.1 ACT
比较稳定
▶
2.2 SmolVLA
表现一般
▶
2.3 Pi0
这个任务对于 Pi0 肯定没问题,我们加点干扰
▶
本套课程到这里就结束了,感谢大家支持,希望以后有缘再见!