1.4 仿真上位机测试(RoboDK)
本课程仿真部分使用软件:RoboDK
RoboDK 是一款工业机器人仿真与离线编程软件,适用于多种品牌及机械臂型号。
- 官网下载地址:https://robodk.com/download
- 官方提供免费试用版本,注册后可体验 30 天完整功能,非常适合学习与练习。
1. 安装 RoboDK 驱动
-
安装 RoboDK
-
前往 Episode1 资料下载中心下载安装 Episode1 RoboDK 驱动 Python 脚本
api_episode_driver.py -
将驱动脚本复制到 RoboDK 安装目录:
C:\RoboDK\api\robot\ -
下载 Episode 1 机器人建模文件,拖拽导入 Robodk
-
按照上位机连接参数,填写入 Robodk
上位机 RoboDK 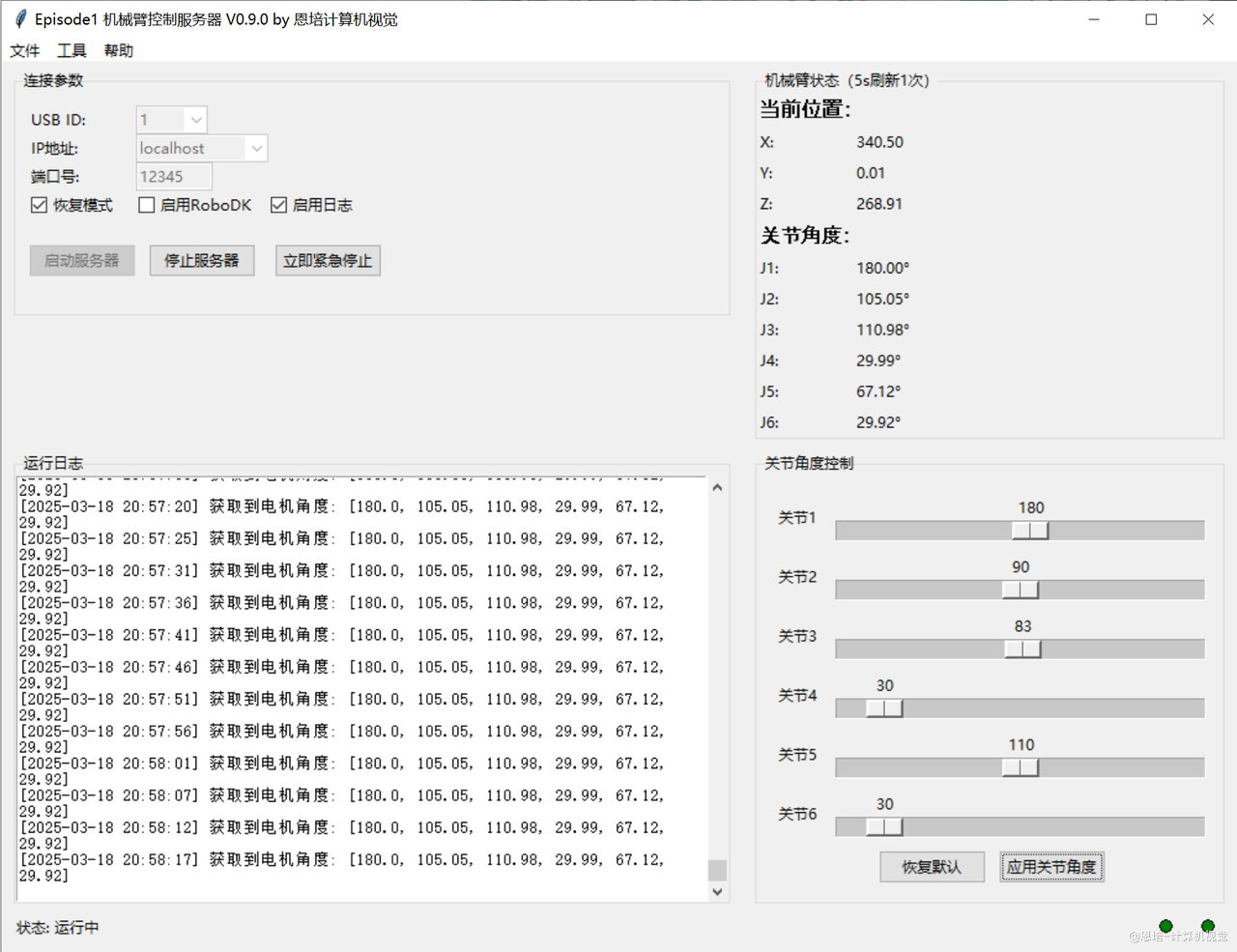
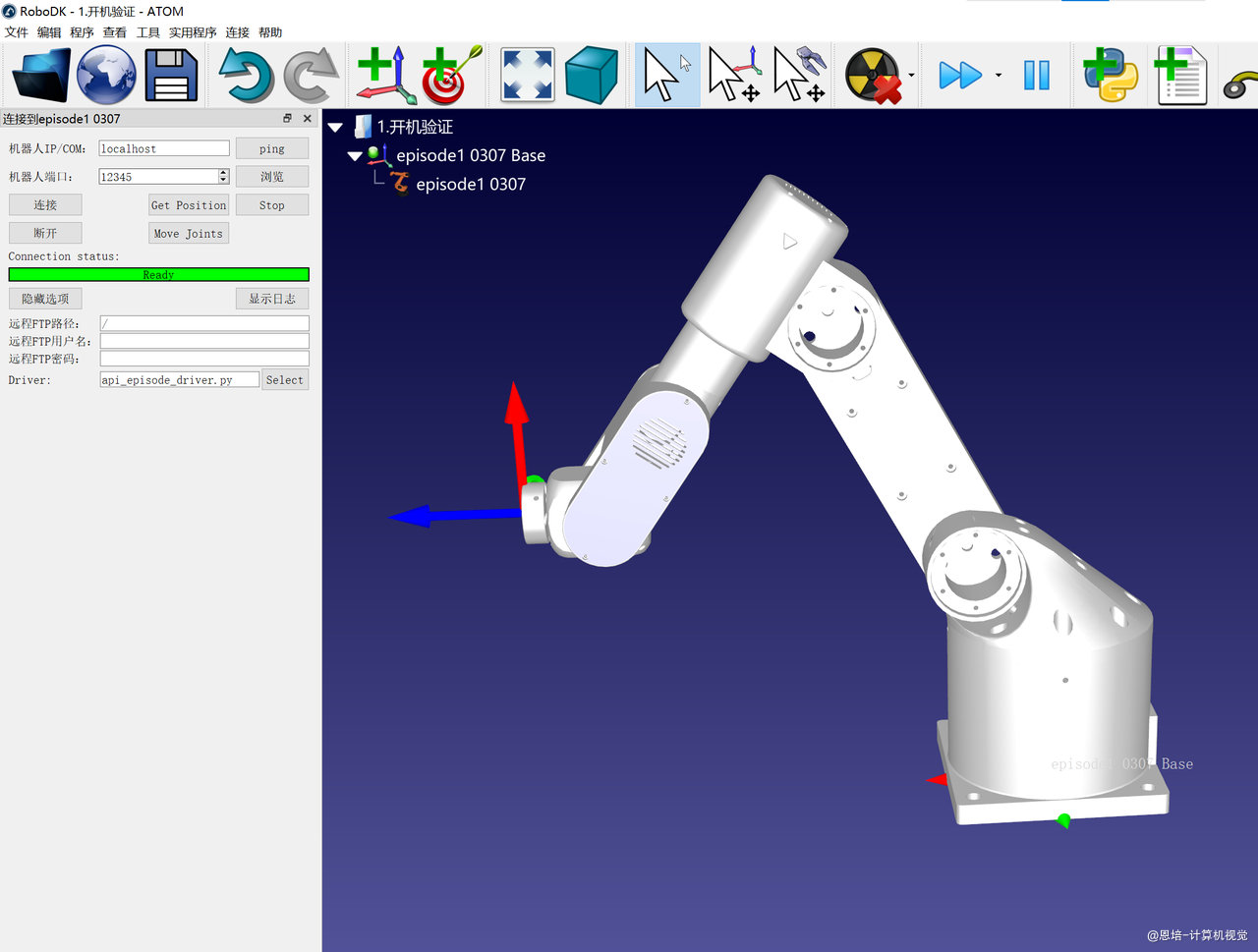
-
点击“连接”即可建立与 API 通讯。
-
异常问题可以点击“显示日志”查看。
2. RoboDK 使用
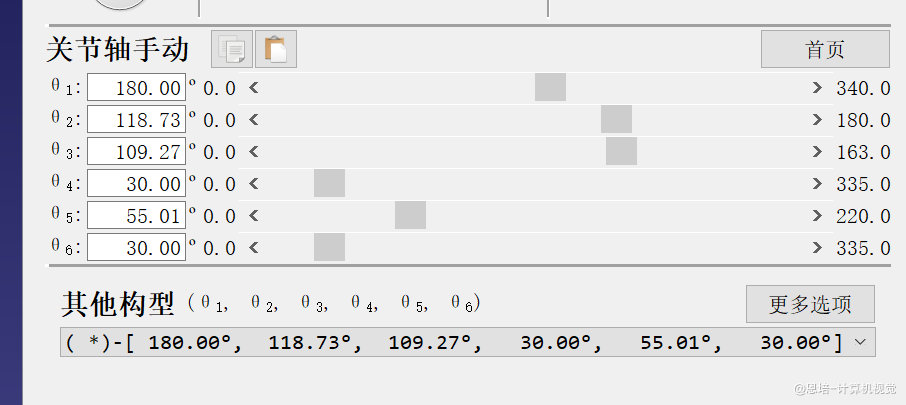
2.1 关节轴手动调整
操作方法类似于上位机,拖拽设置完角度,点击“Move joints”即可运动。
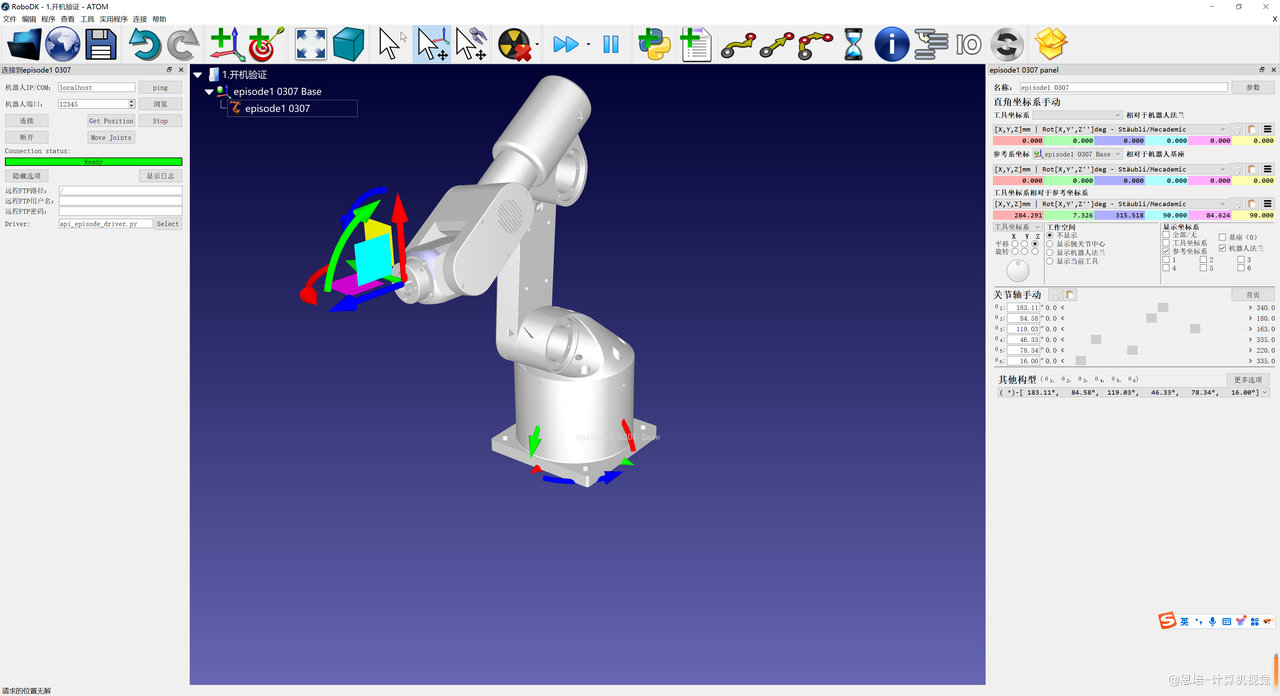
2.2 关节轴拖拽调整
- 在“显示坐标系”中勾选机器人法兰
- 按住“Alt”键,然后用鼠标即可拖拽或旋转机器人法兰到别的位置
- 点击“Move joints”即可运动
2.3 设置运动轨迹
Episode 支持两种运动模式,这两种模式都已经支持 RoboDK:
- 关节角度运动模式 MoveJ
- 两点直线运动模式 MoveL
轨迹设置方法:
-
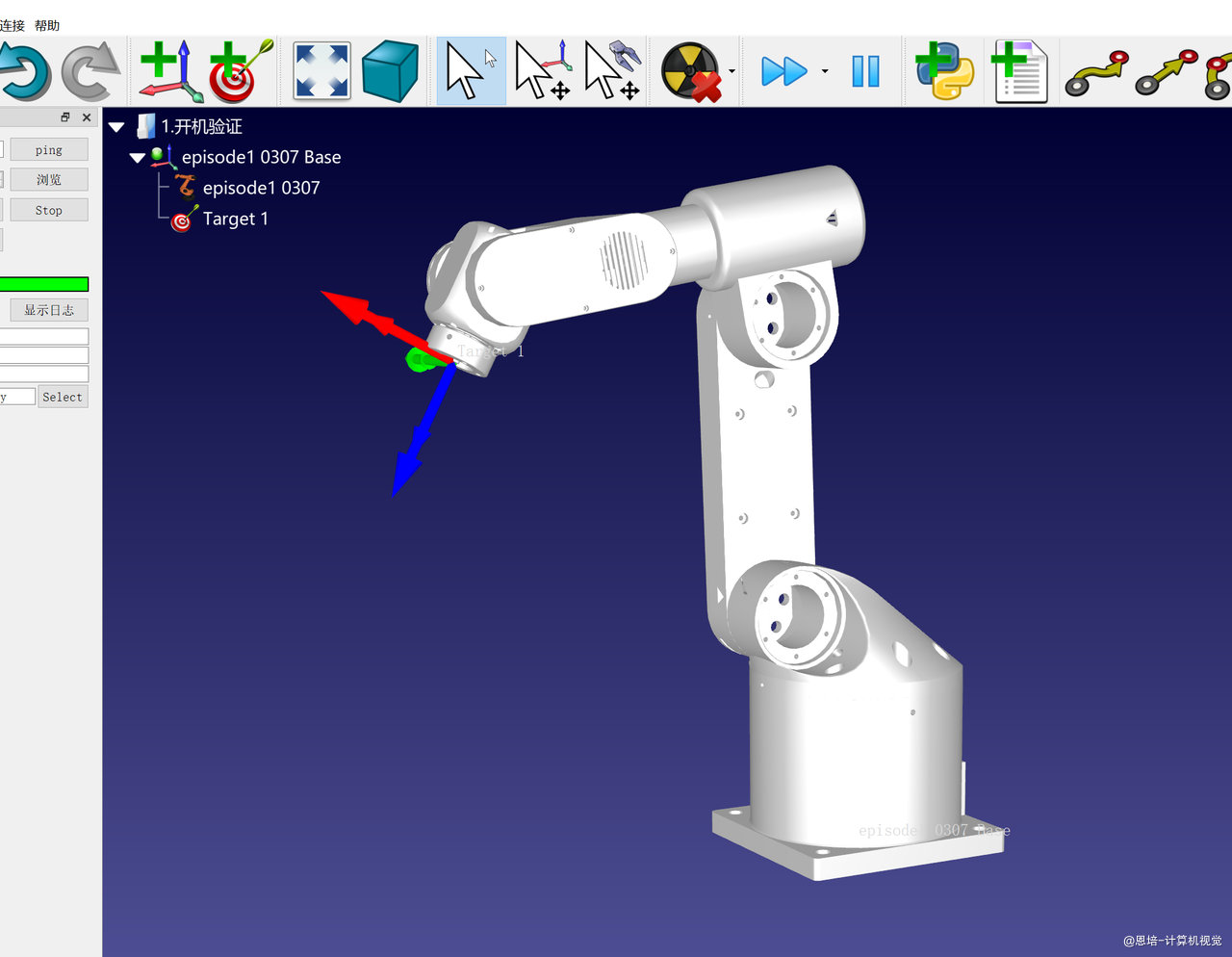
先利用拖拽、手动等方法,使机械臂移动到一个位置
-
添加目标点
-
再添加下一个点
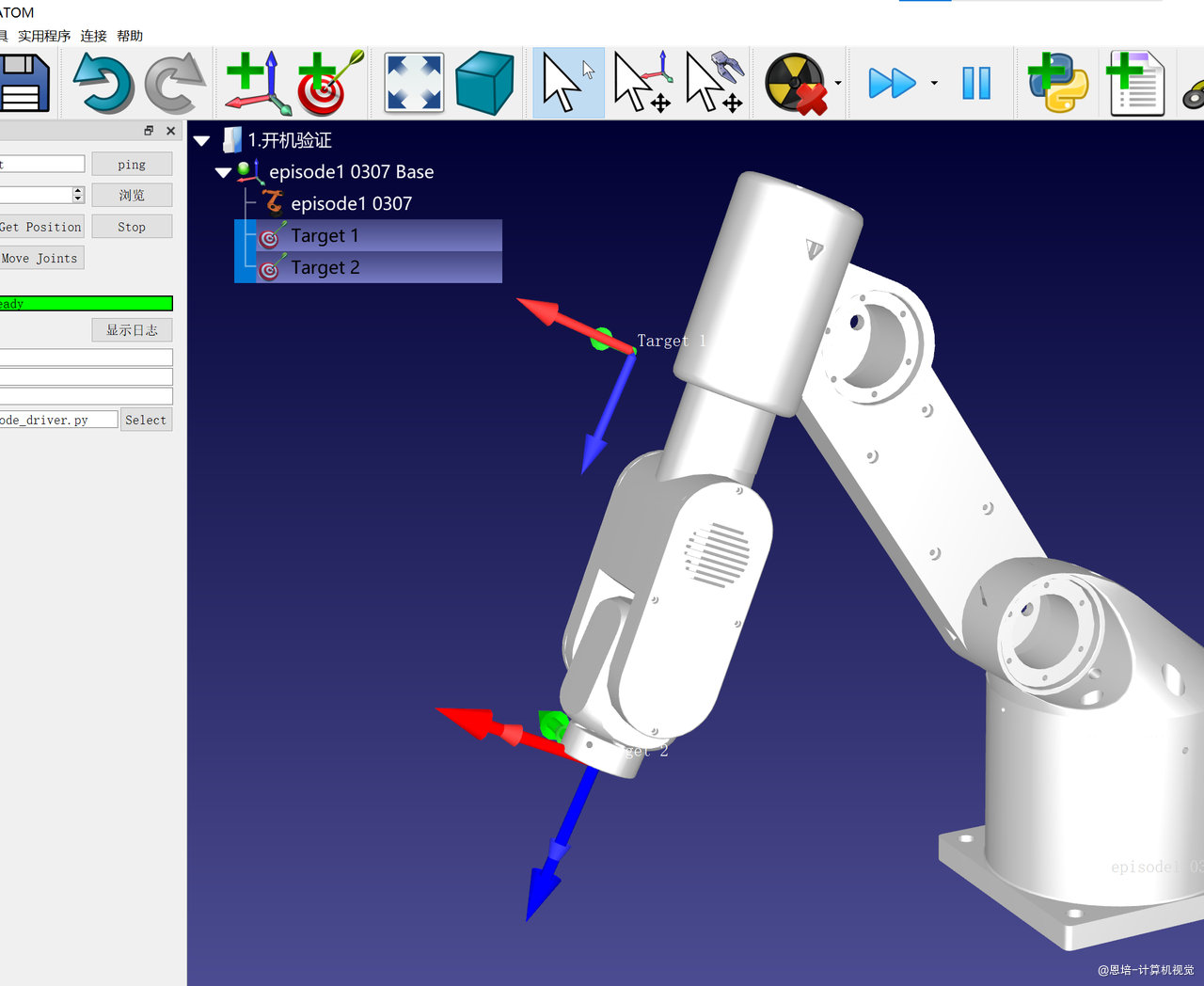
-
如需要,添加更多点
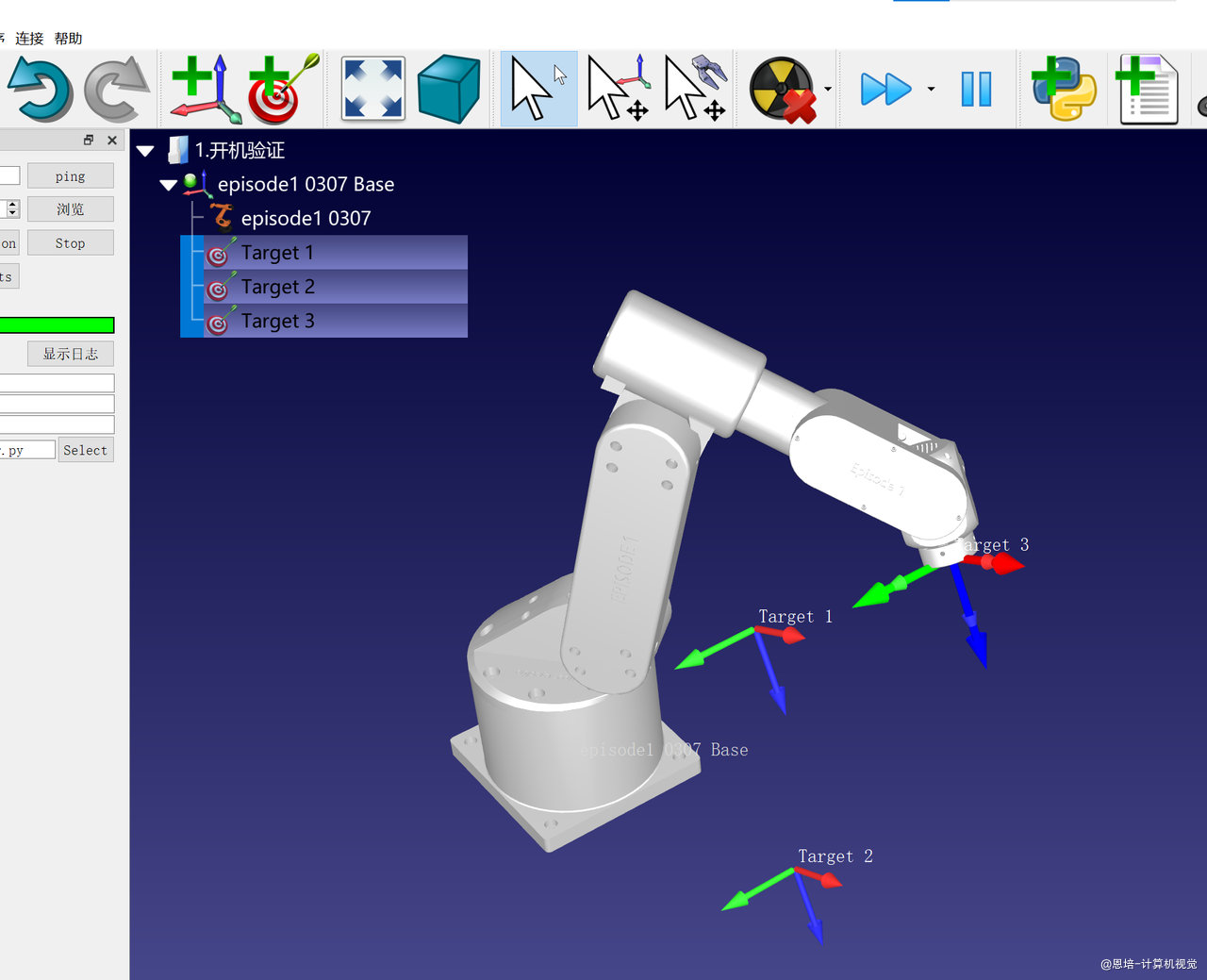
-
选中这些目标点,然后鼠标右键“创建程序”
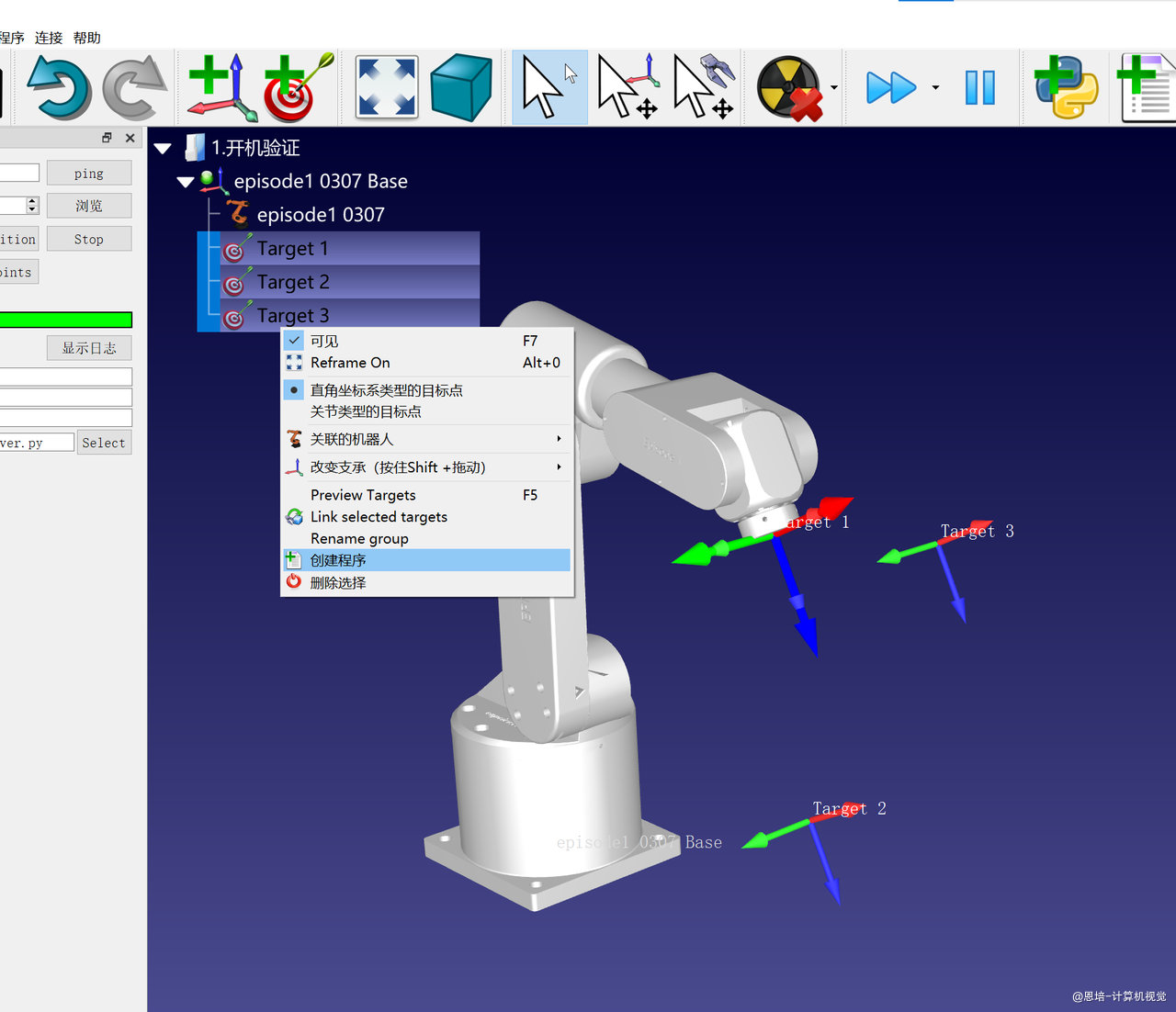
-
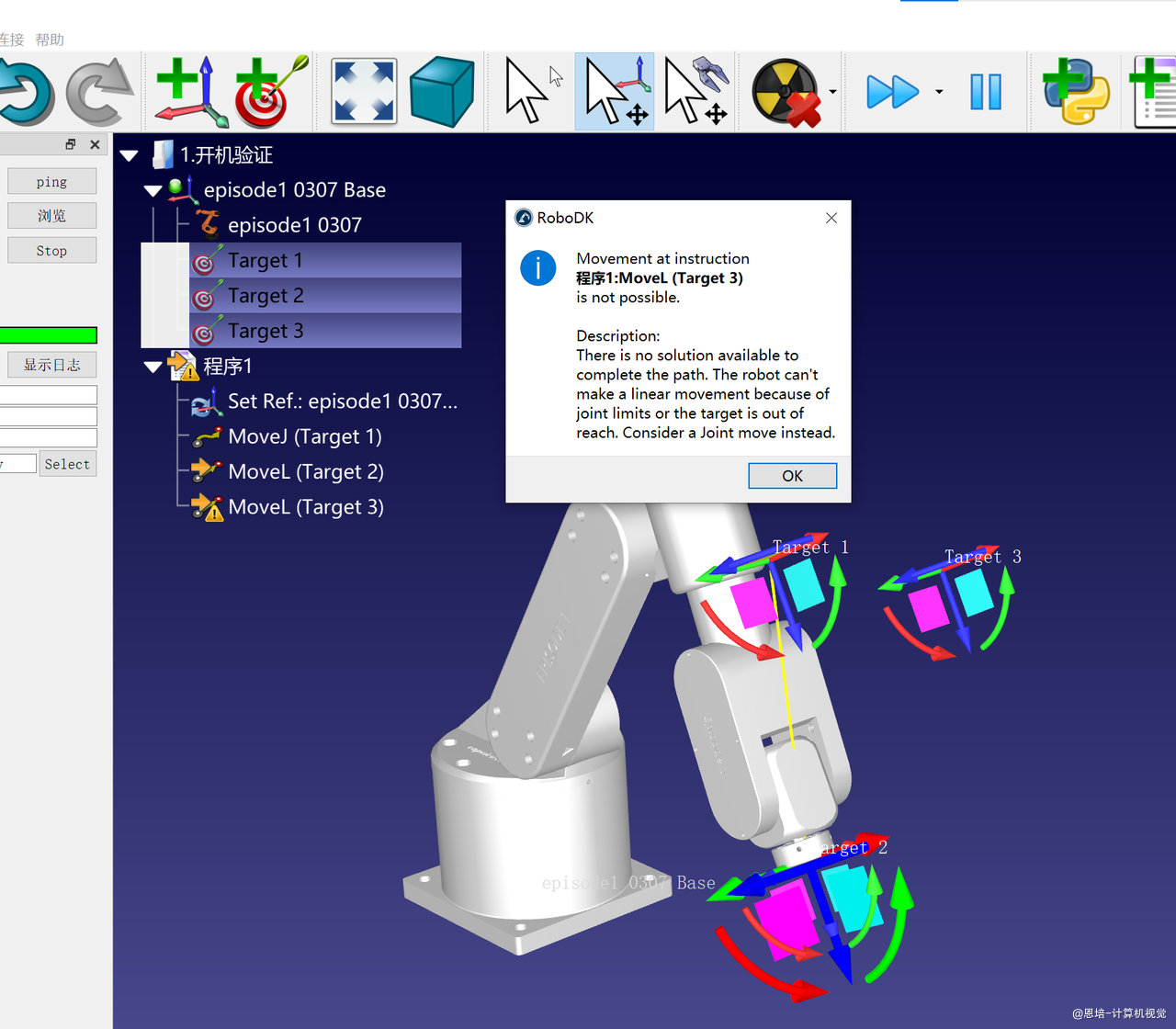
如果对应路径规划失败,会提示警告,并且该节点前有感叹号
一般都是连续直线运动 MoveL 规划失败。
但需要注意,这里只是程序预规划,实际是否有解,需要待会实际运行才知道。
-
可以选中无解的节点,切换另一种运动模式,如 MoveJ
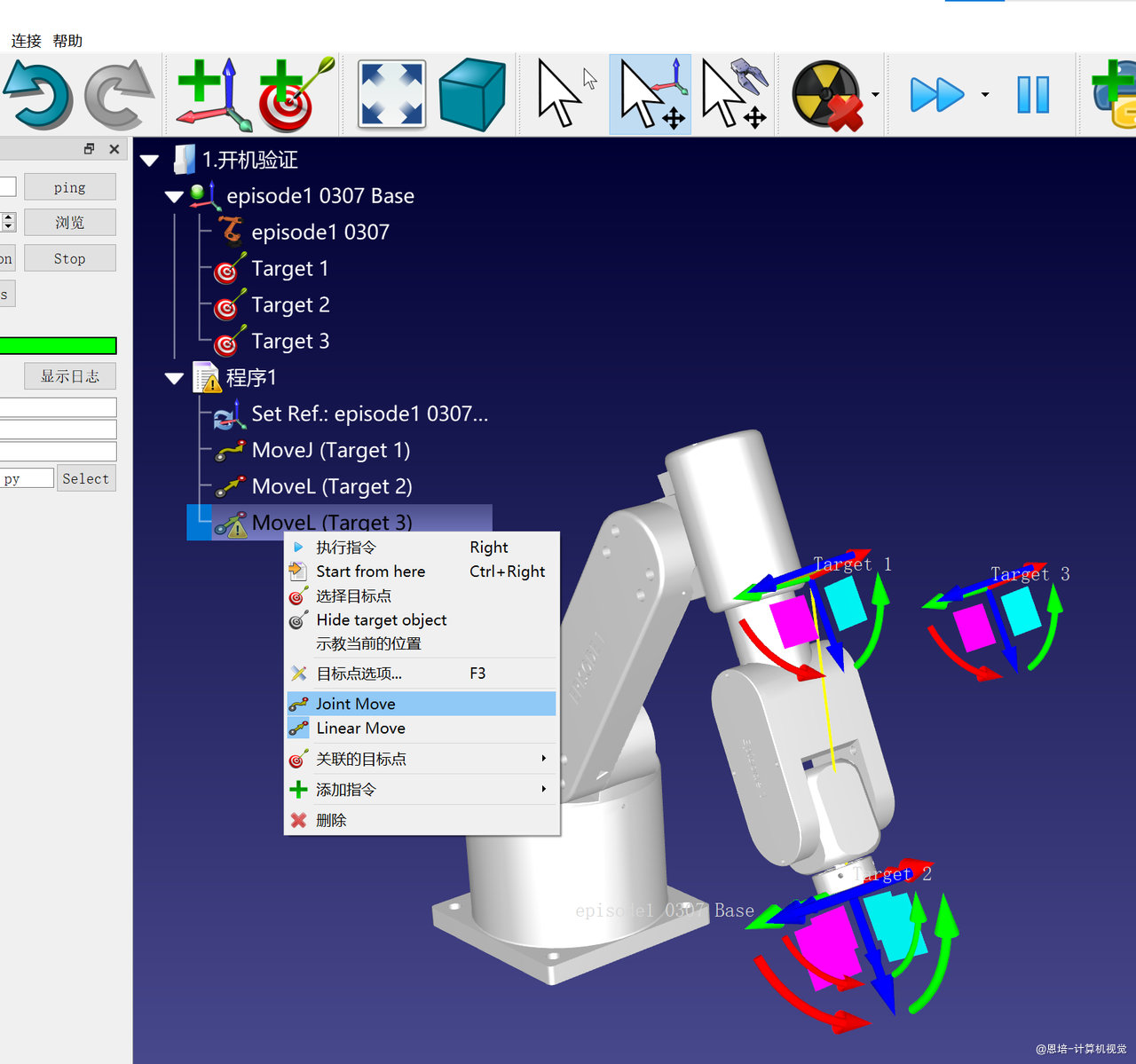
-
也可以切换不同目标点:
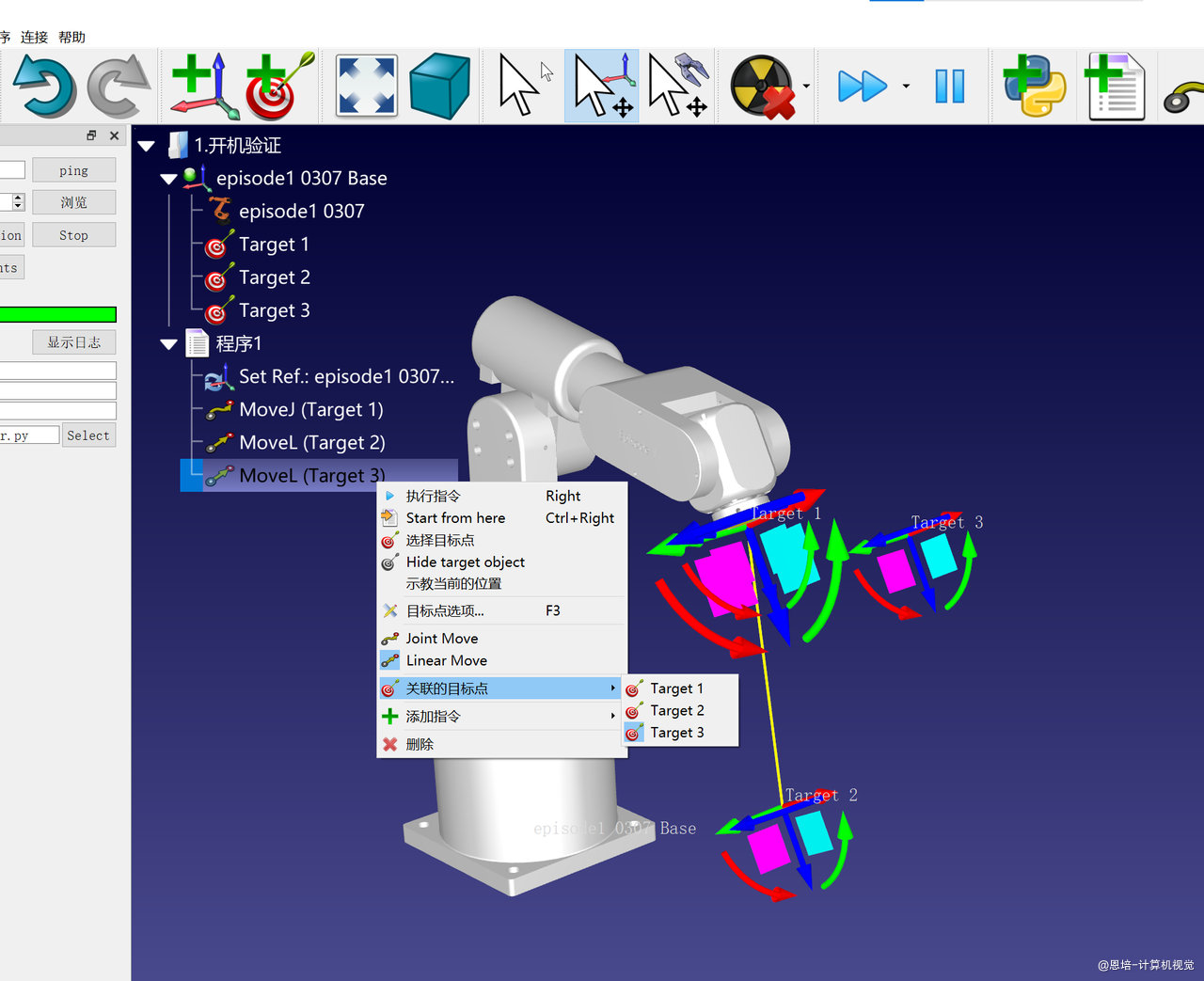
-
可以点击运行:
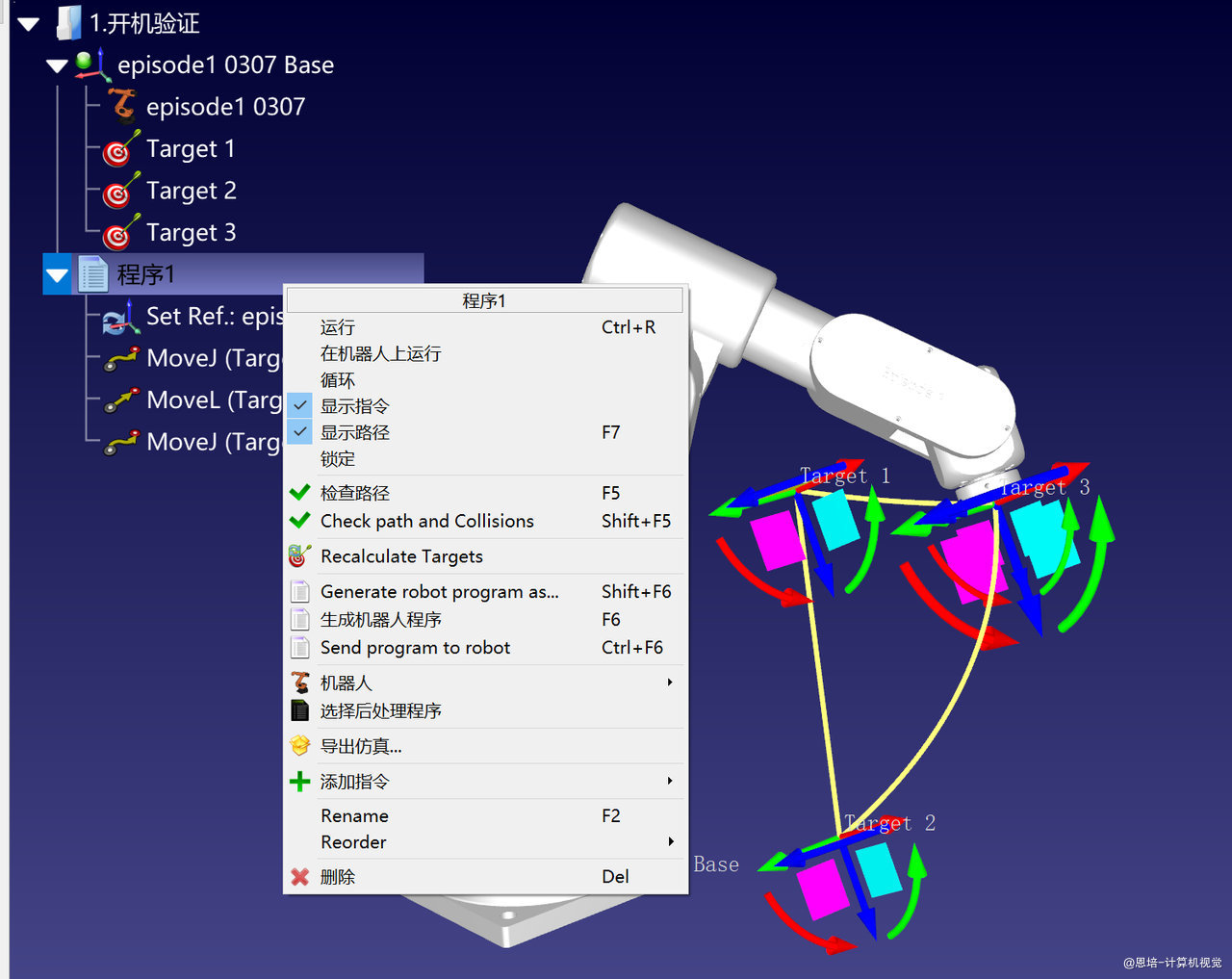
-
勾选在真机运行,即可同步真机
注意查看左侧状态栏:
- 绿色:表示 Ready
- 黄色:运动中 working
- 红色:出错,如轨迹无解、连接失败等
Ready Working 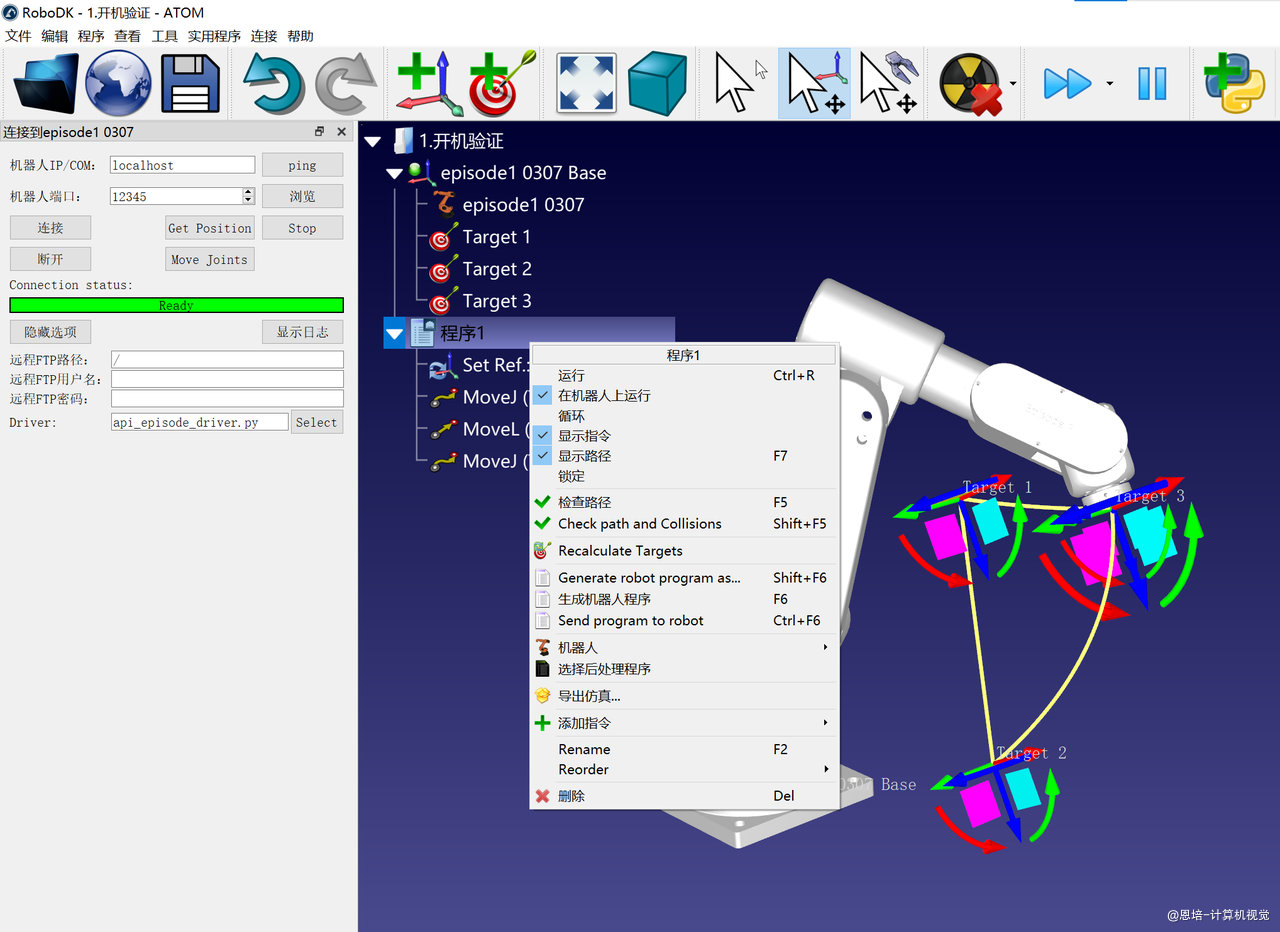

很多同学还在痛苦的组装,如果你已经在煲机,请分享一下你的视频到答疑群,鼓励一下这些朋友!