1.5 夹爪组装教程
本文档需要配套对应视频观看,请联系助手获取视频(微信:ffcv1024)
1. 准备工作
感谢大家选择 Episode 1 六轴机械臂,本节课将帮助大家把收到的末端夹爪套件组装成成品。组装完毕一共包含四类物品:
- 主控盒:接收机械臂控制指令,控制负压吸盘与舵机夹爪
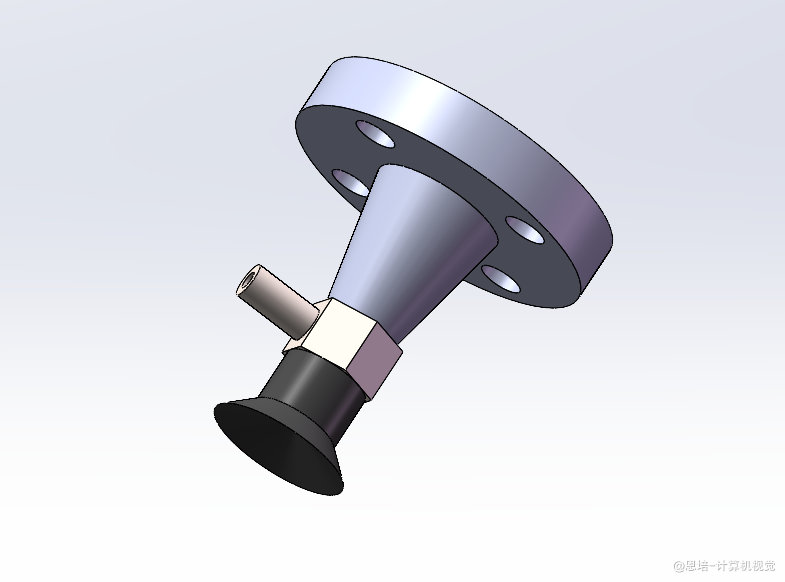
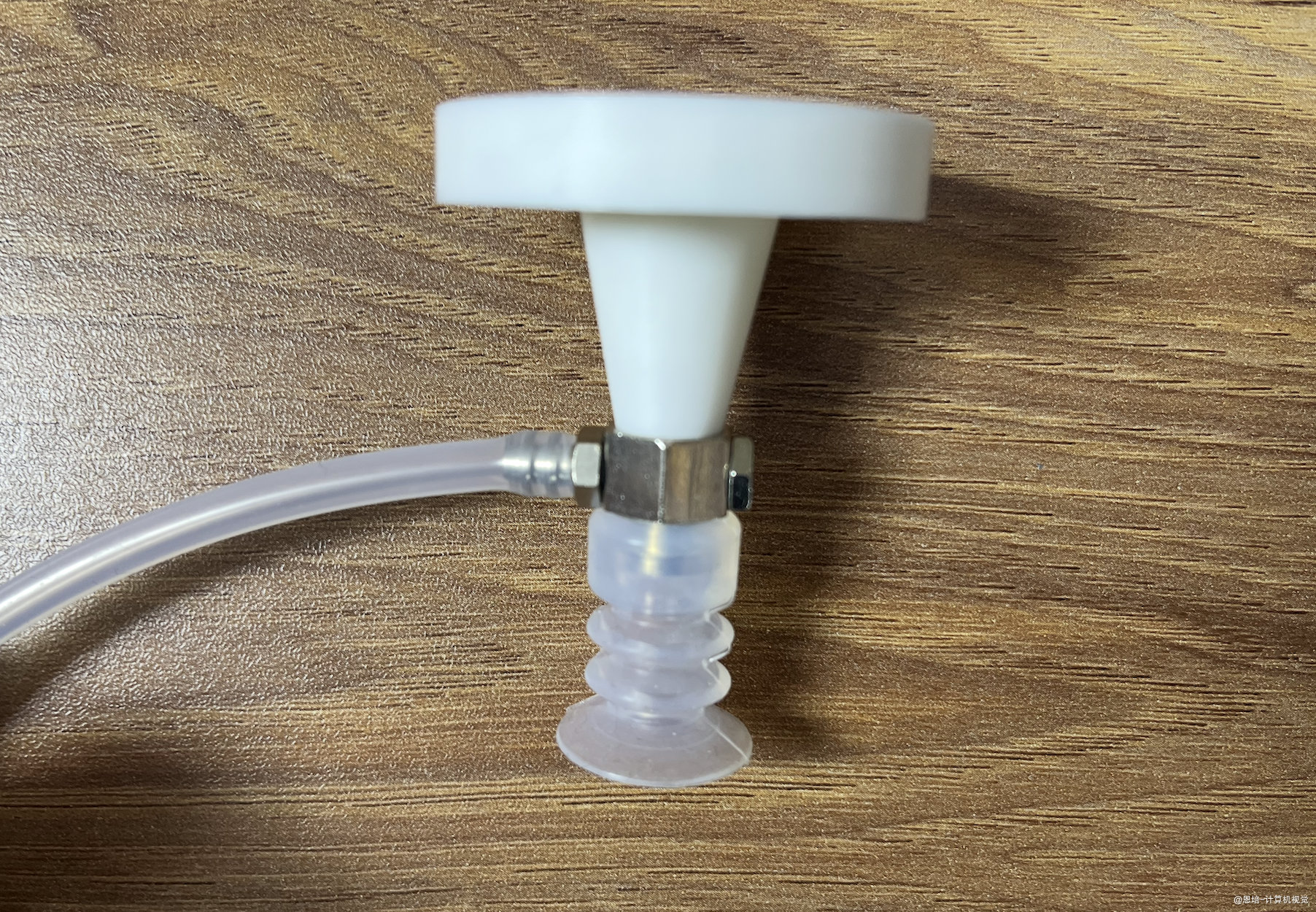
- 负压吸盘:适合抓取表面平整的物体
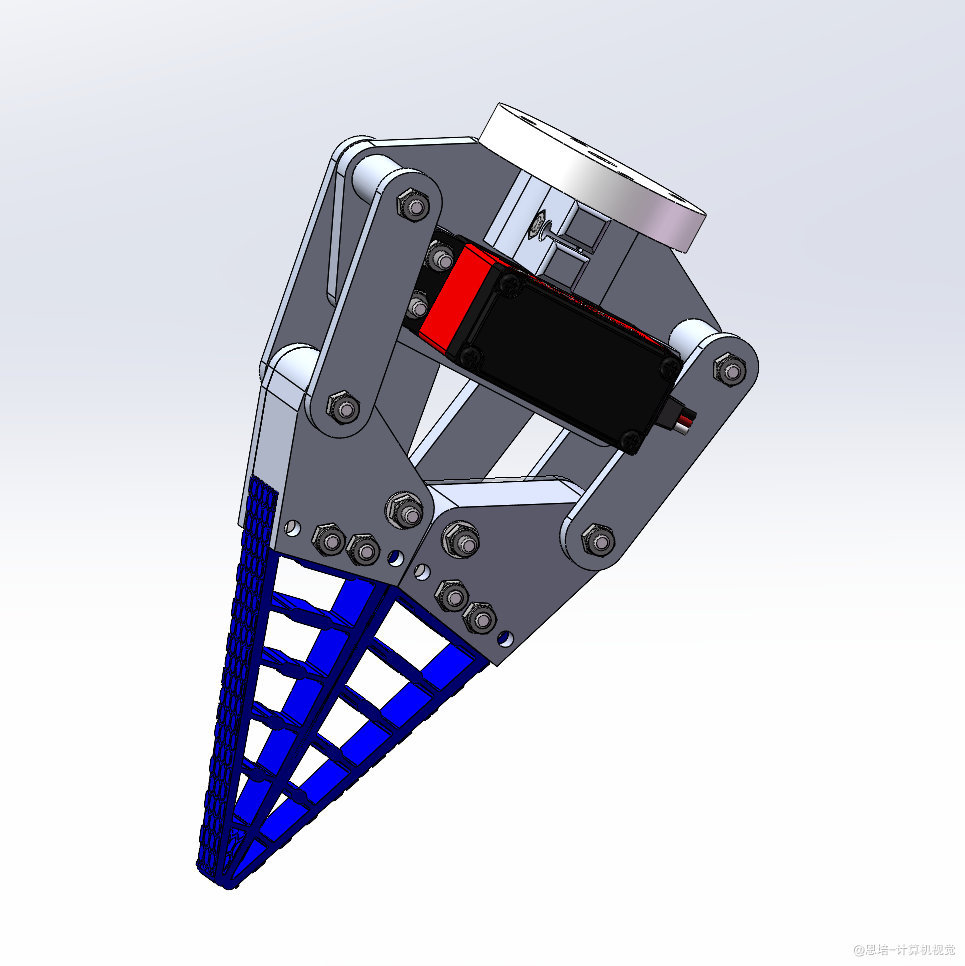
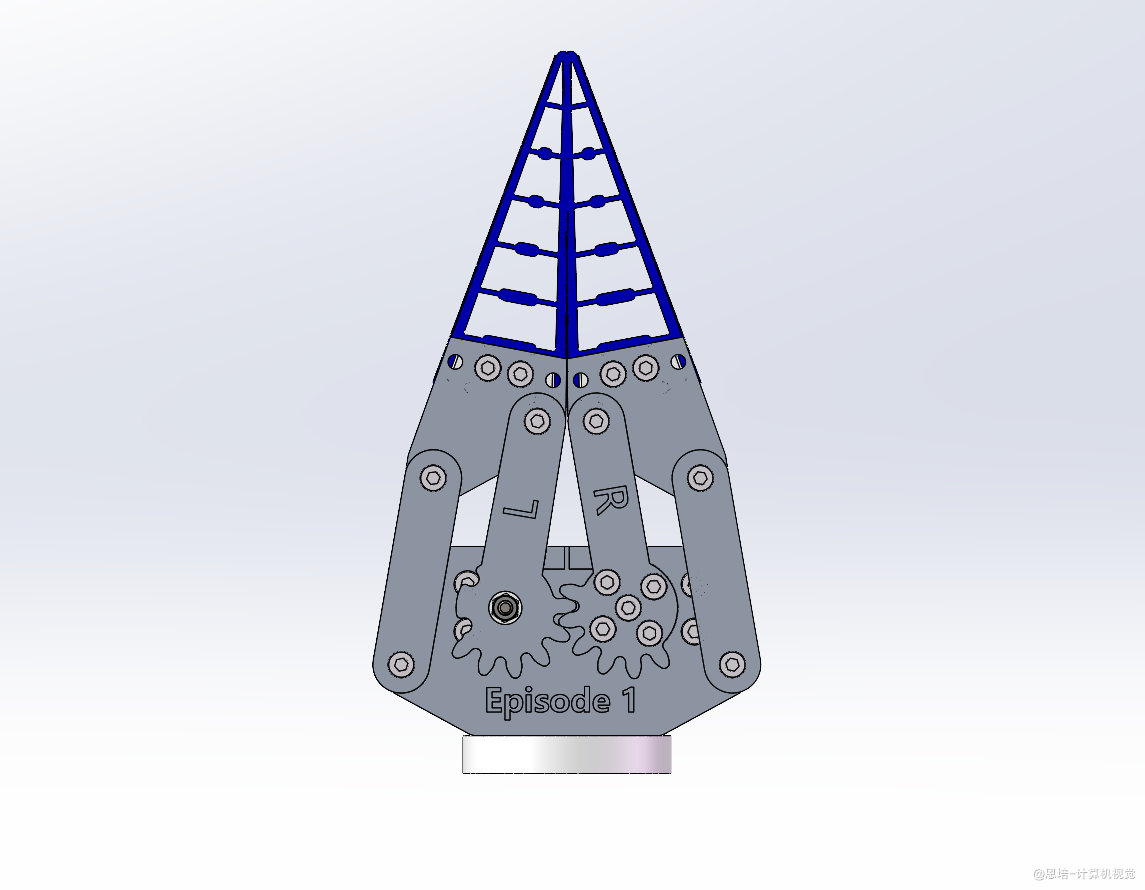
- 舵机二指柔性夹爪:适合抓取不规则物体
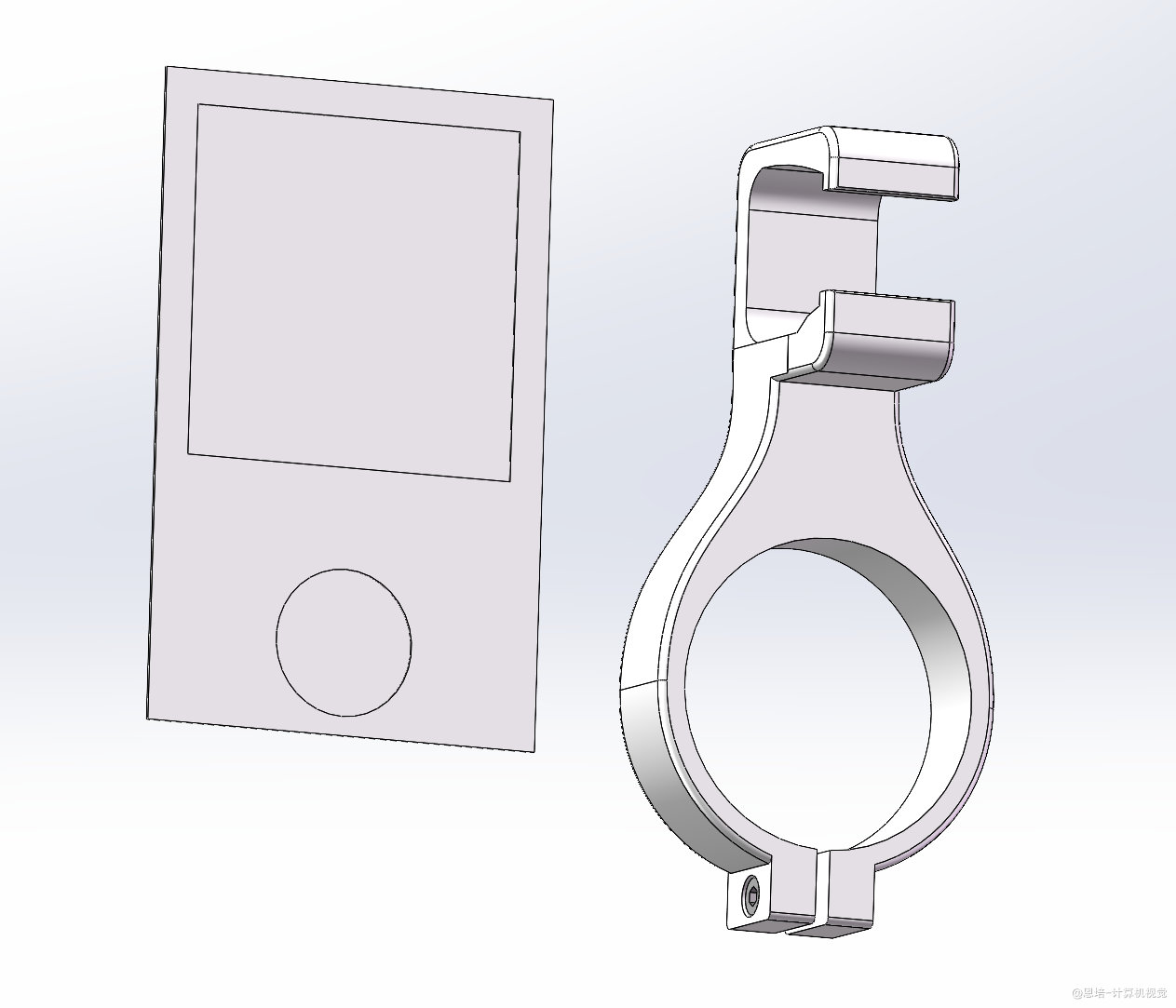
- 视觉标定相关:
- Aruco 视觉标定板
- D435 深度相机支架(注:夹爪套餐不含深度相机,配套相机支架仅适配 D435 深度相机。若后续课程使用其他型号,我们将提供对应支架设计方案。)
| 主控盒 | 负压吸盘 | 舵机二指柔性夹爪 | 视觉标定相关 |
|---|---|---|---|
 |
 |
 |
 |
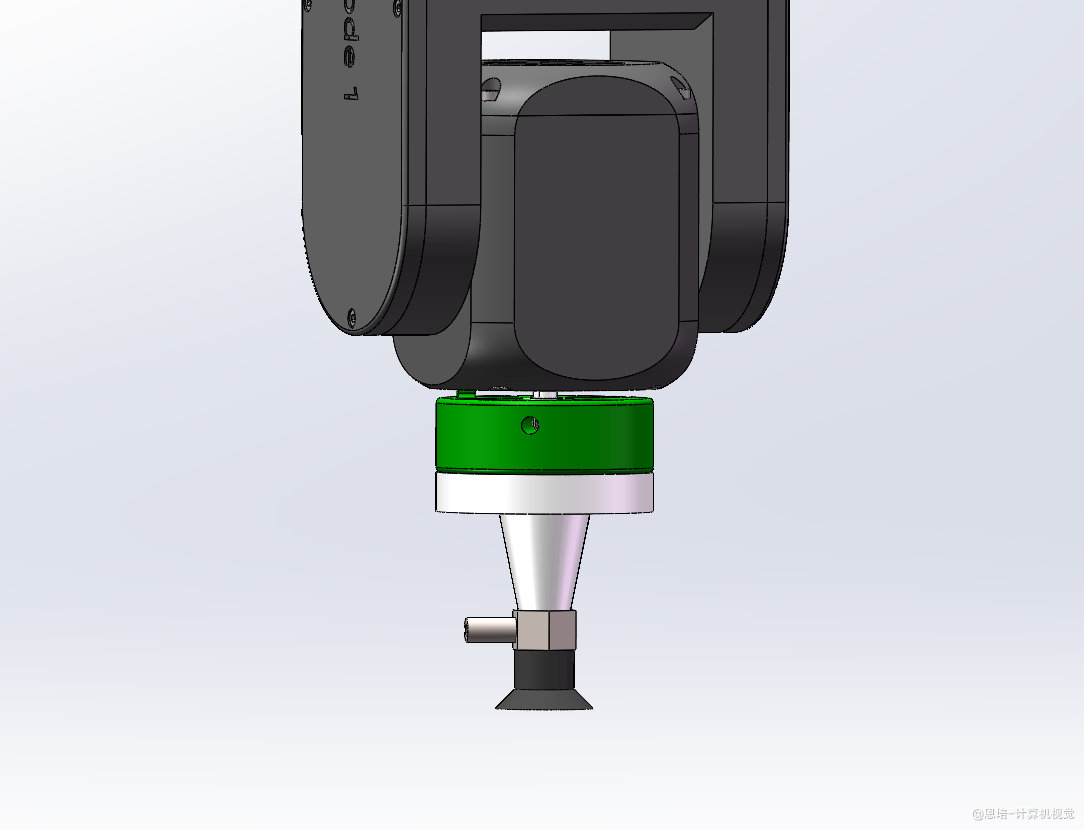
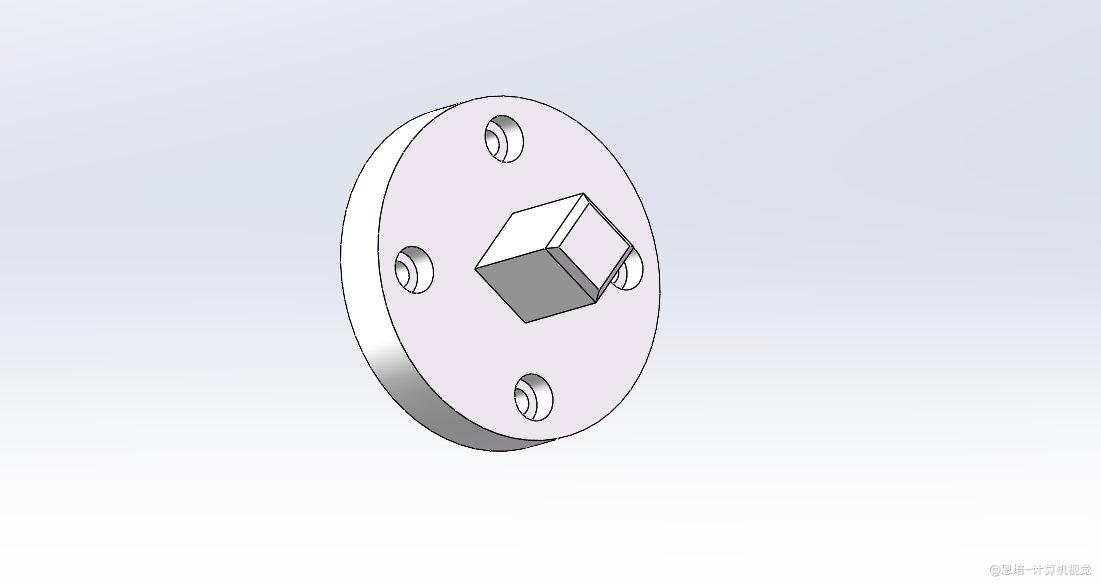
负压吸盘装配效果图:
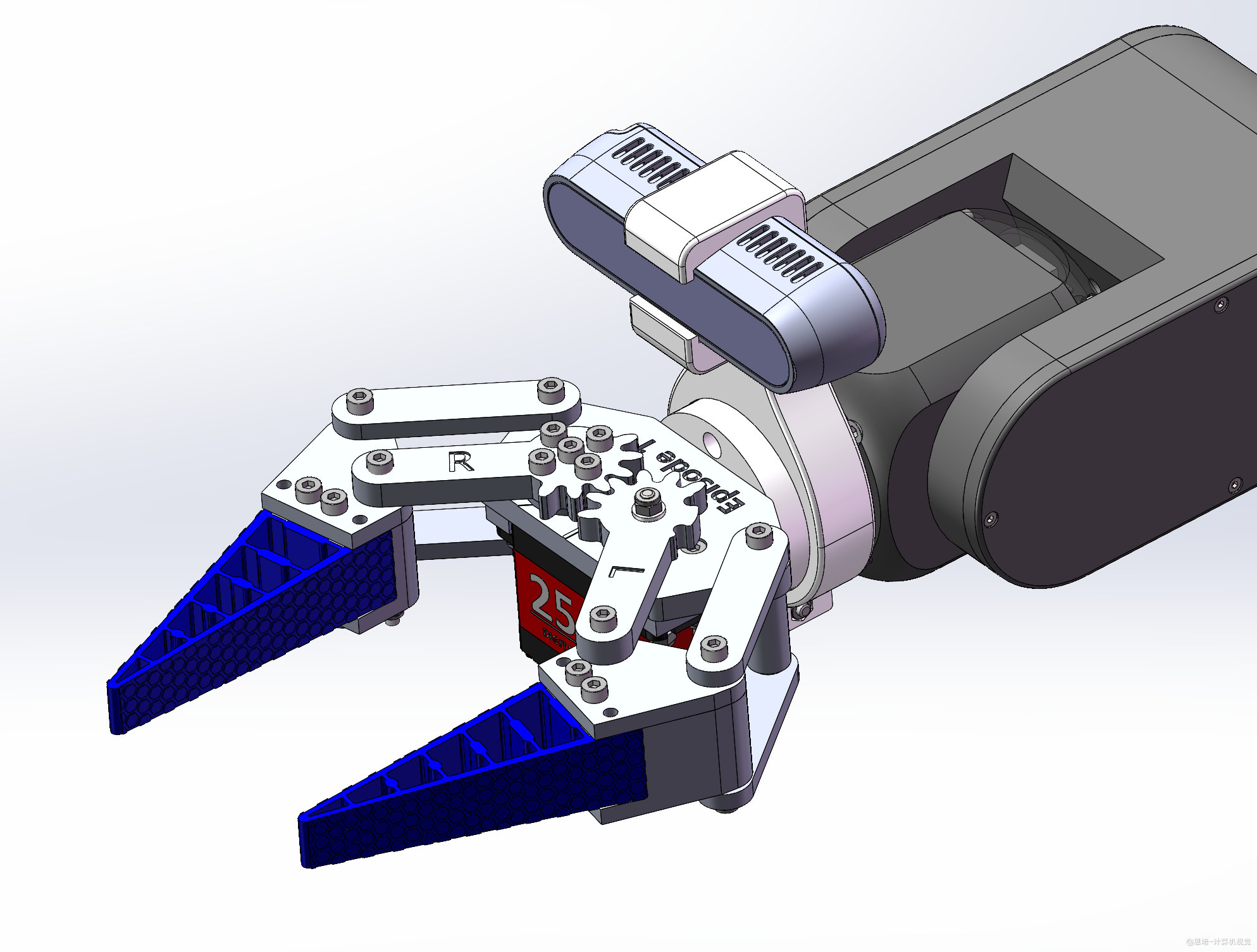
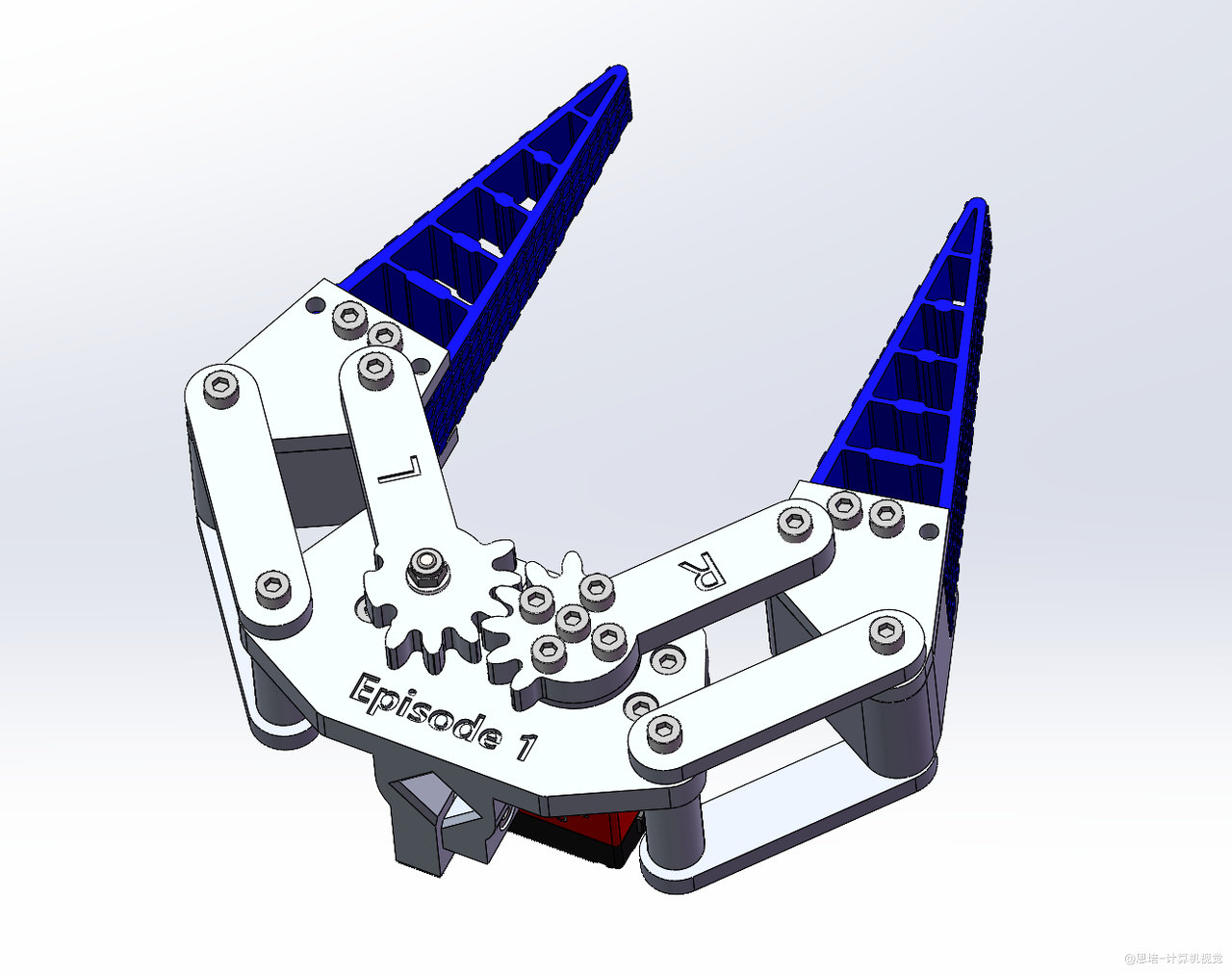
舵机二指柔性夹爪装配效果图:
注:配套相机支架仅适配 D435 深度相机。若后续课程使用其他型号,我们将提供对应支架设计方案。
操作步骤:
安装过程中手部保持清洁,干燥(尽量戴手套),否则可能引起器件短路、工作异常(如烧坏电路板)。
对于塑料零件,如果用电动螺丝刀请调低扭矩,手动扭的时候也不要太暴力,能紧固即可。
舵机夹爪扭矩较大,操作时请注意夹手。
- 拆箱
- 准备必备工具:
名称 图示 推荐链接 作用 常规十字螺丝刀 
/ 拧自攻螺丝 2mm 一字螺丝刀 
推荐链接 拧 4P 插头微型螺丝,建议直径 2mm 内六角扳手套件 
推荐链接 安装各种内六角螺钉 尖嘴钳 
推荐链接 辅助安装螺母 剥线器 
推荐链接 电子线接线用 焊锡枪 
推荐链接 接线 锡焊膏 
推荐链接 焊接 打火机 / / 热缩管收缩用 剪刀 / / 剪断电子线
2. 装箱单(零件介绍)
3. 组装步骤
3.1 必备知识
- Episode1 底座已经预留 4P 扩展口,4 分别对应(12V+、GND、CAN_H、CAN_L),我们的夹爪需要用这个扩展口供电、通信。
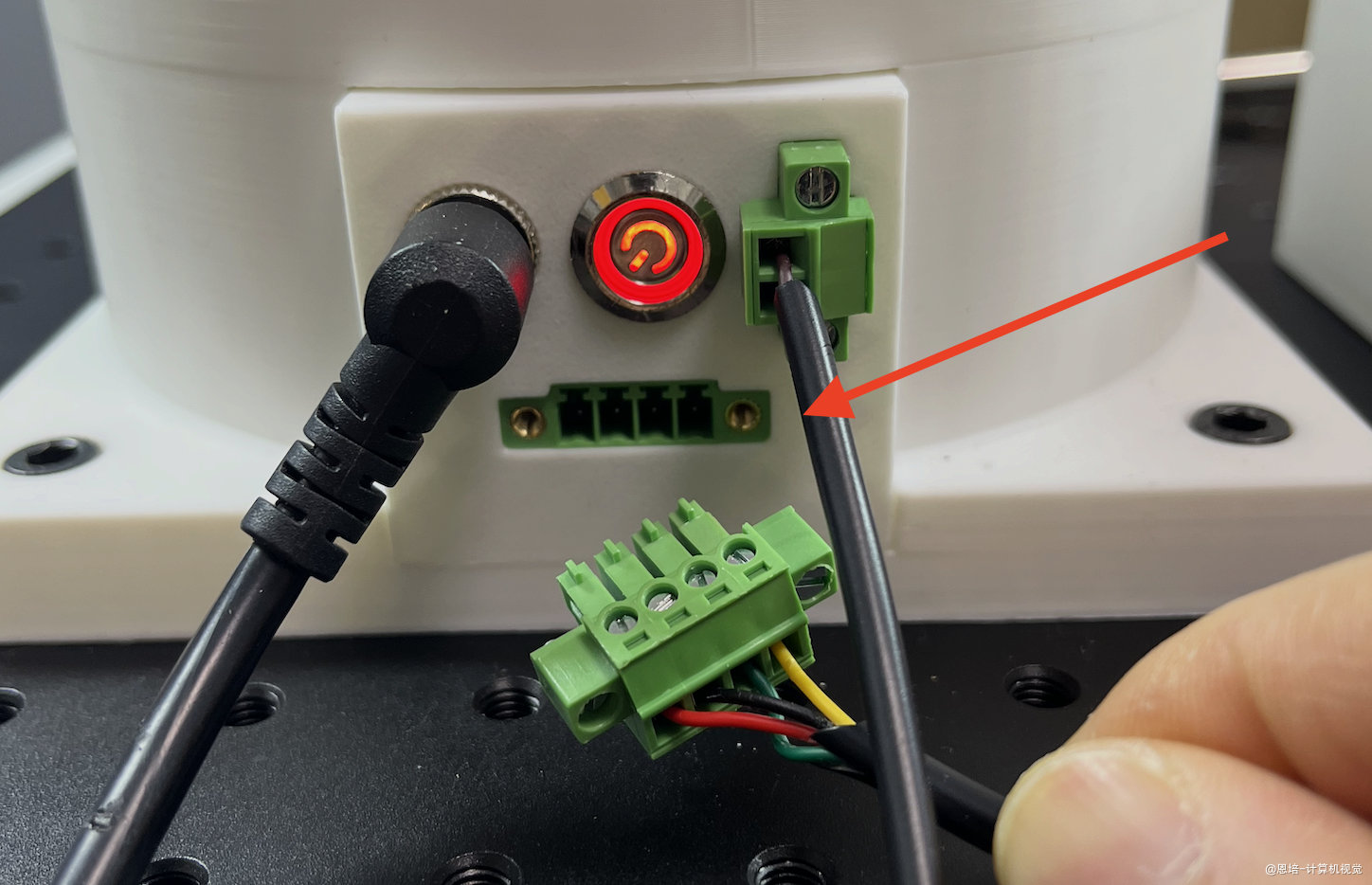
-
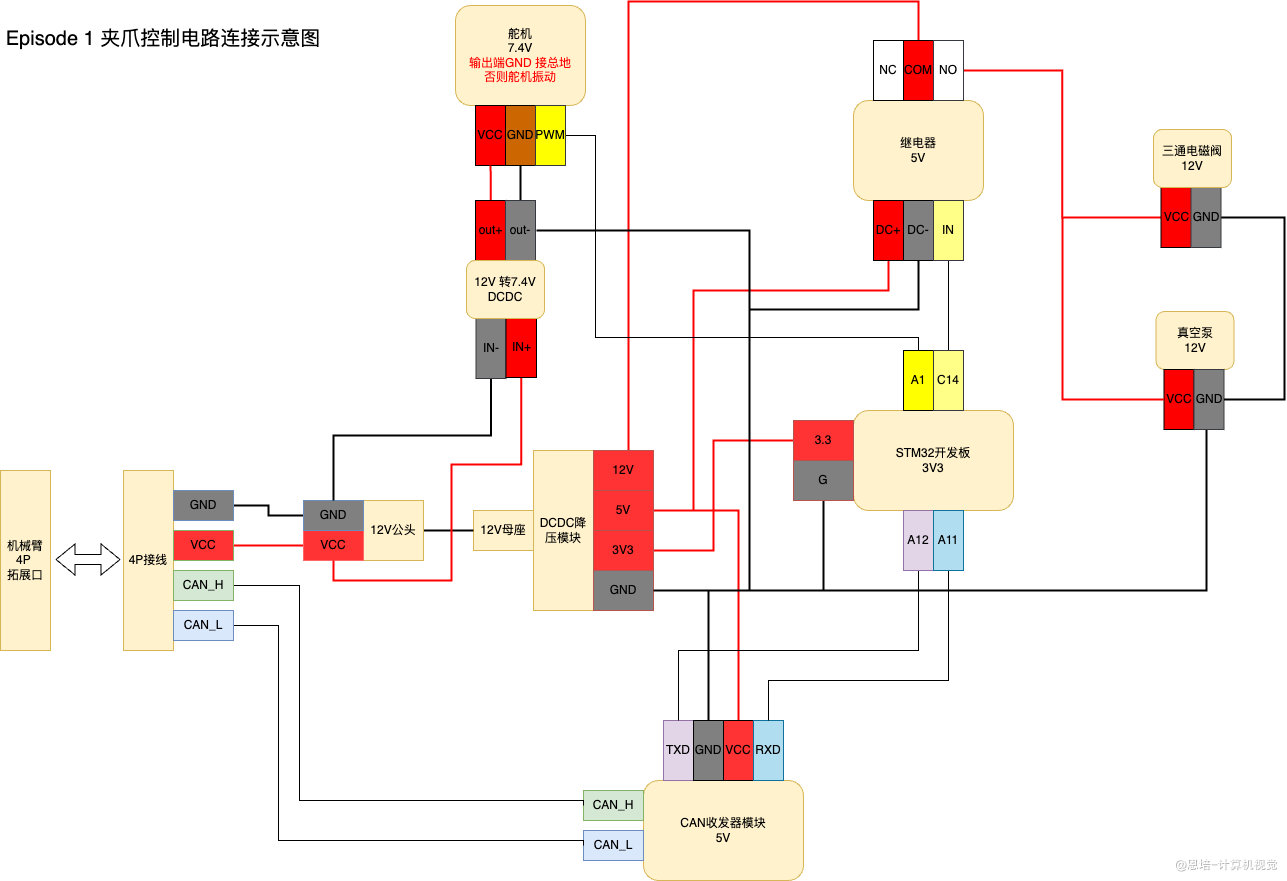
如下电路连接示意图:
- 输入电压是 12V,电路一共需要 4 种电压,分别由 2 个 DCDC 降压模块转换:
- 12V:真空泵、三通电磁阀
- 7.4V:舵机
- 5V:继电器、CAN 收发器模块
- 3V3:STM32 开发板
- 控制指令路由方向:计算机上位机 ---> 机械臂 4P 拓展口 ---> CAN 收发器模块 ---> STM32 开发板,再通过 2 个芯片管脚控制
- C14:高低电平信号,控制继电器通断,从而控制真空泵、三通电磁阀启停
- A1:PWM 脉冲,控制舵机运动角度
- 处理好接地,尤其不要忘了
- 为了确保 PWM 信号有一个稳定的参考,避免信号失真和舵机动作异常,舵机的地还需要与 STM32 的地接一起
- 输入电压是 12V,电路一共需要 4 种电压,分别由 2 个 DCDC 降压模块转换:
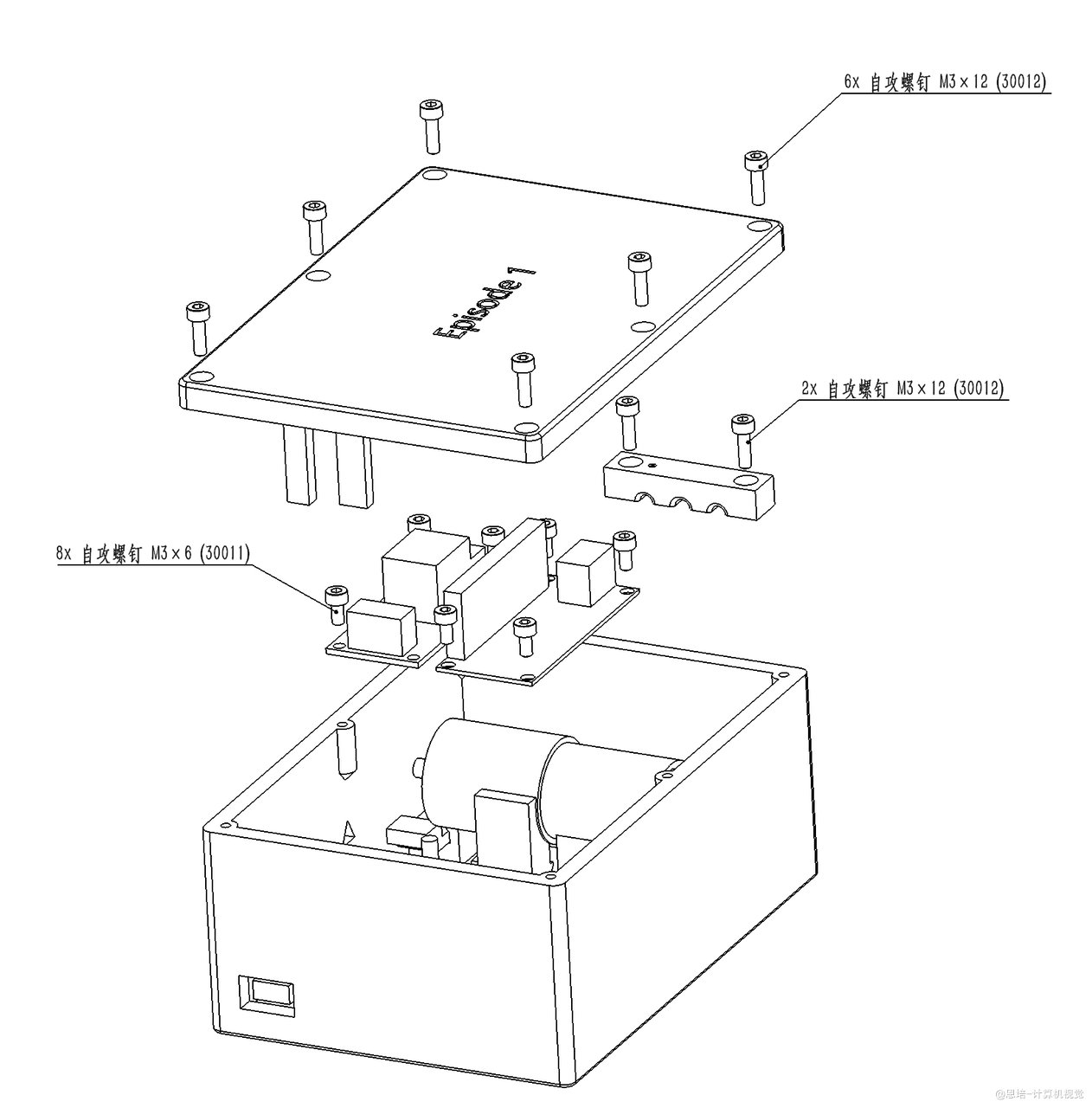
3.2 控制盒组装
控制盒主要是连线,请务必看懂上面的接线示意图,否则容易接错、短路。建议参考视频教程接线组装,装配示意图:
- 大部分引脚连线用杜邦线、热缩管即可
- 如果希望加强连接效果,建议用锡焊枪
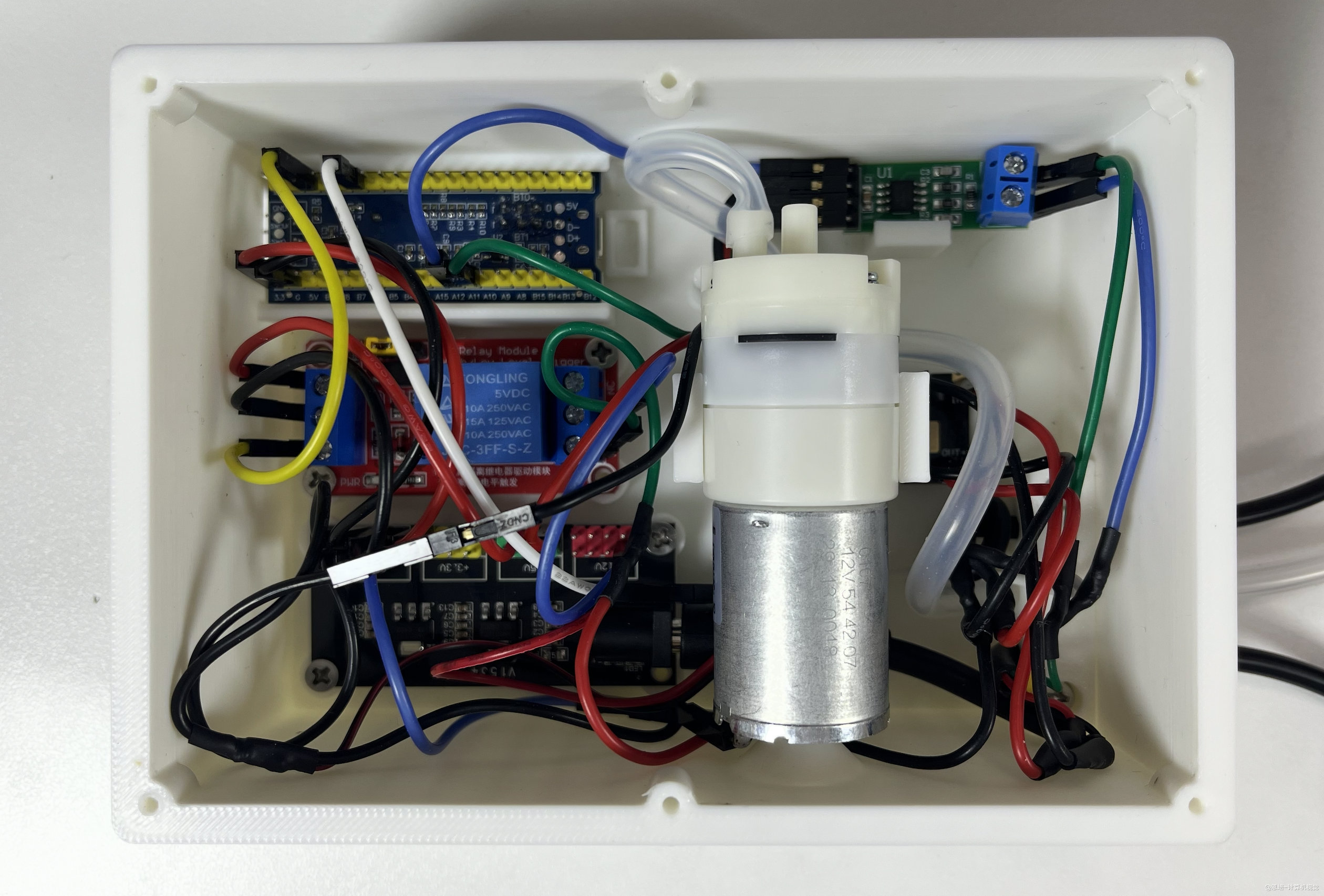
实际效果图:
3.3 负压吸嘴组装
效果图:
3.4 舵机二指夹爪组装
按照视频教程装配即可:
-
先安装舵机四根 M3x20 螺丝(30041)
-
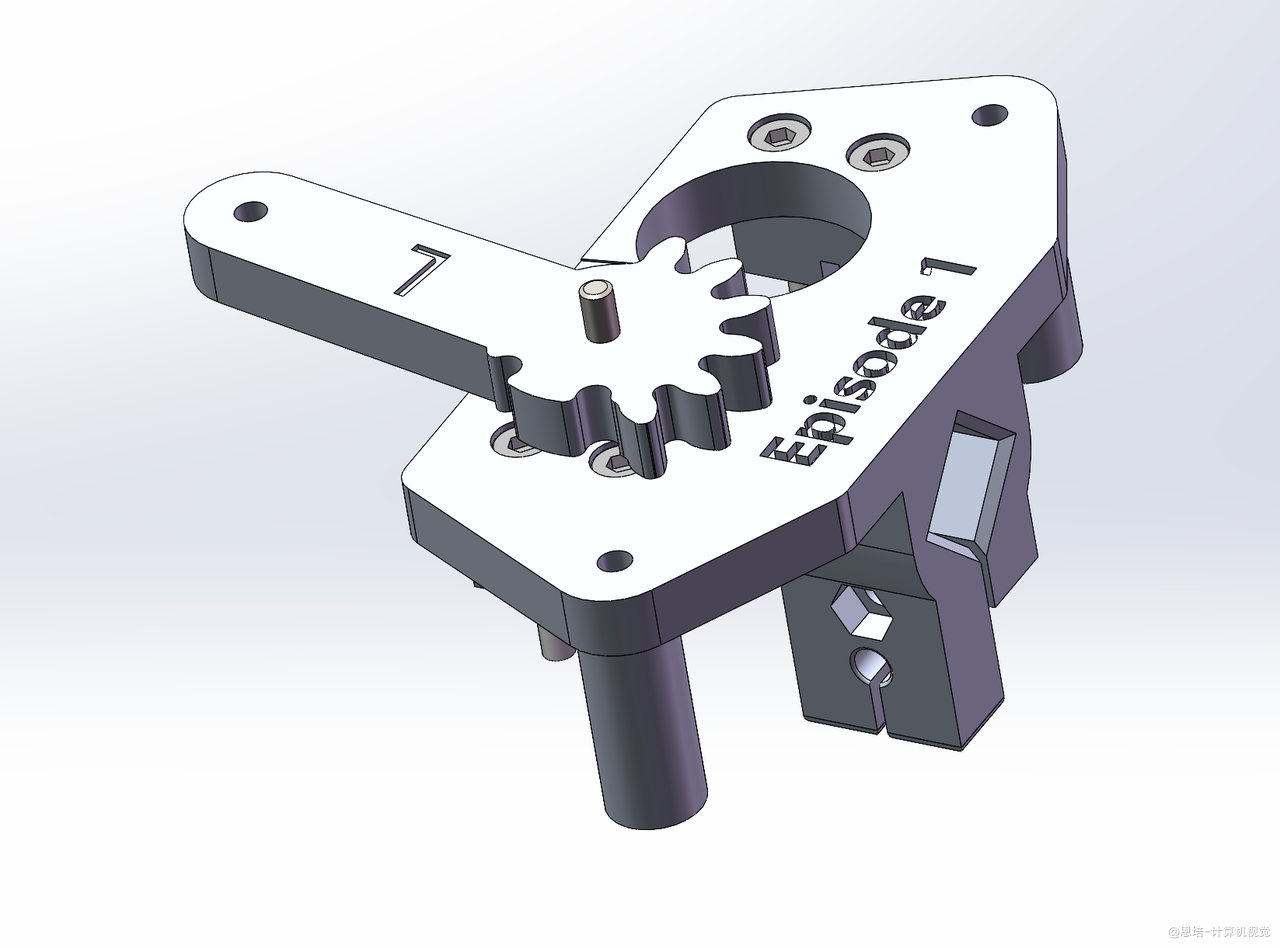
安装齿轮左连杆
- 这里使用十字沉头螺丝 M3x18(30042)
- “L”字朝上
- 连杆和支架支架有 M3x7x1 垫片(30040),降低摩擦力,拧螺丝时候需要压紧齿轮左连杆,否则连杆会被螺钉顶起
-
用 M3 螺母(30037)预先紧固舵机,但不拧死,使舵机可以左右平移
-
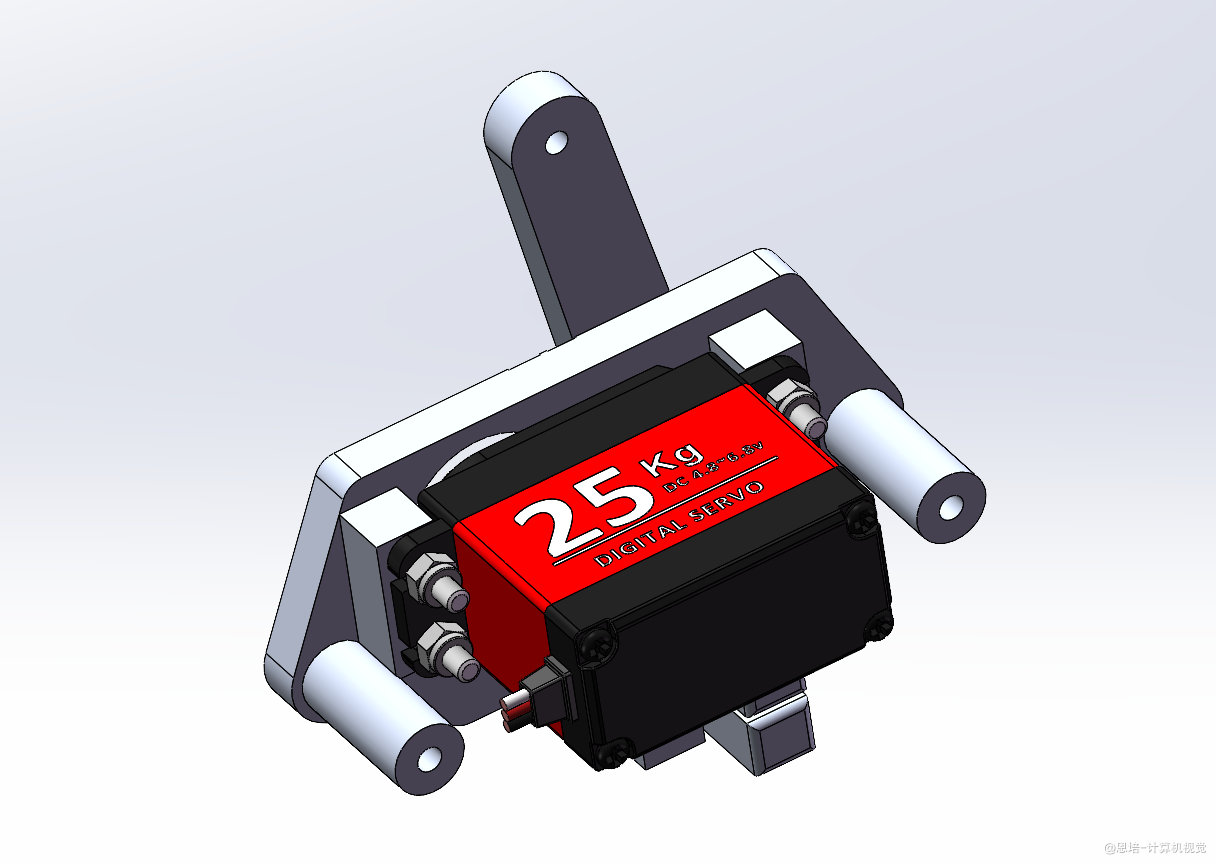
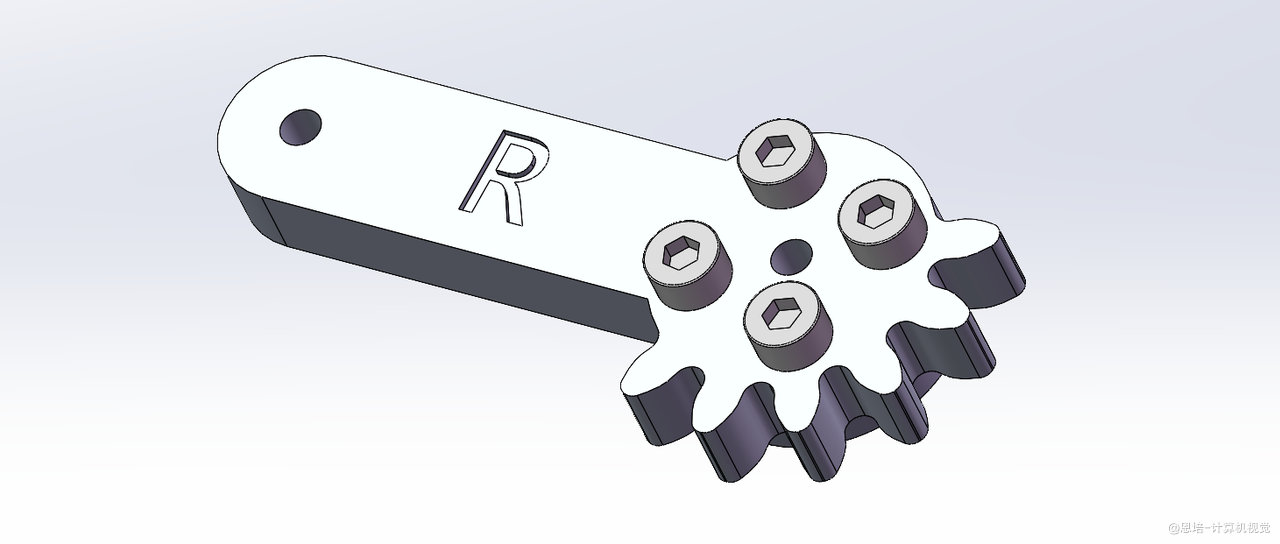
安装齿轮右连杆与舵盘
- 四根螺丝:M3x8(30044)
- “R”字朝上
-
舵机三根导线接线,上电三秒后,舵机会自动运动到 90 度(你也可以用校准上位机去设置角度),不要断电,保持舵机位置,方便定位安装连杆
-
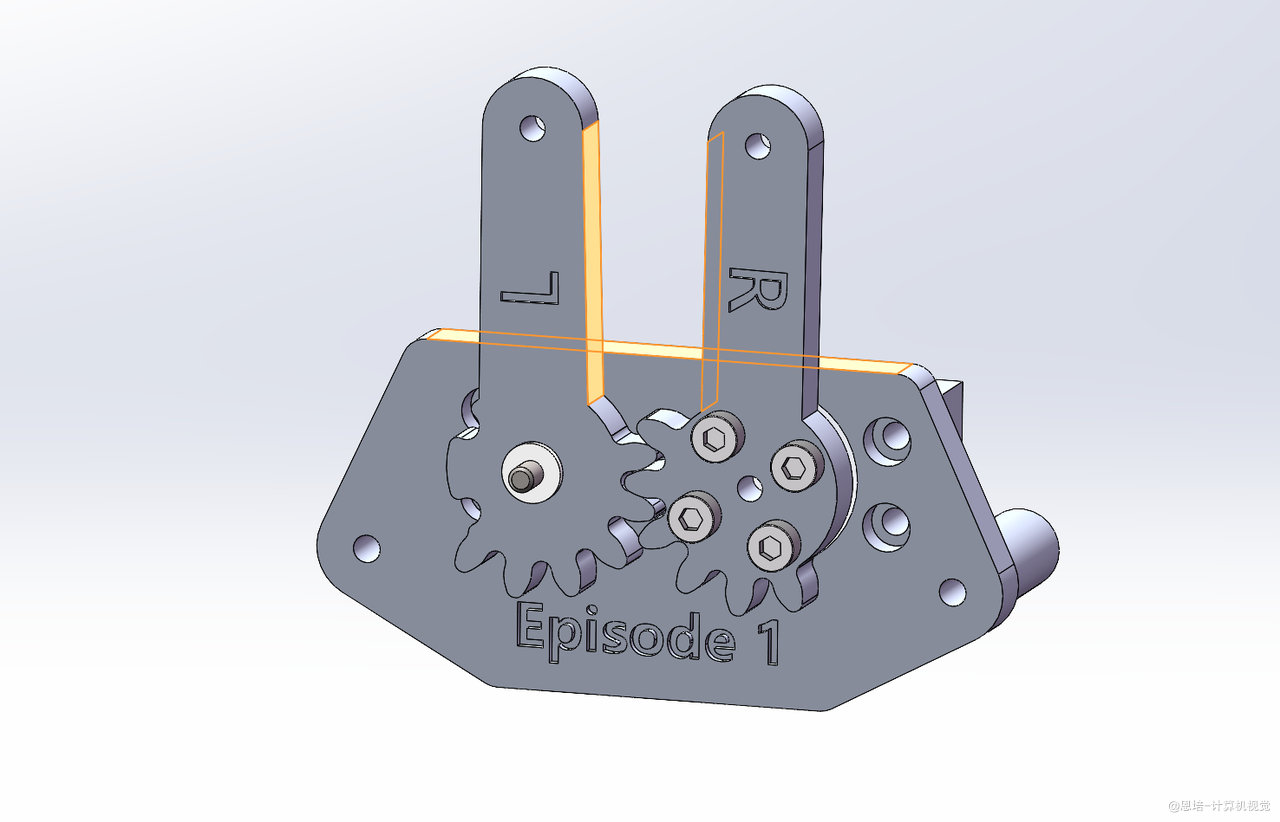
将齿轮右连杆舵盘嵌入舵机
- 不要断电
- 把舵机往右拨一些,不然齿轮间隙太小不好装
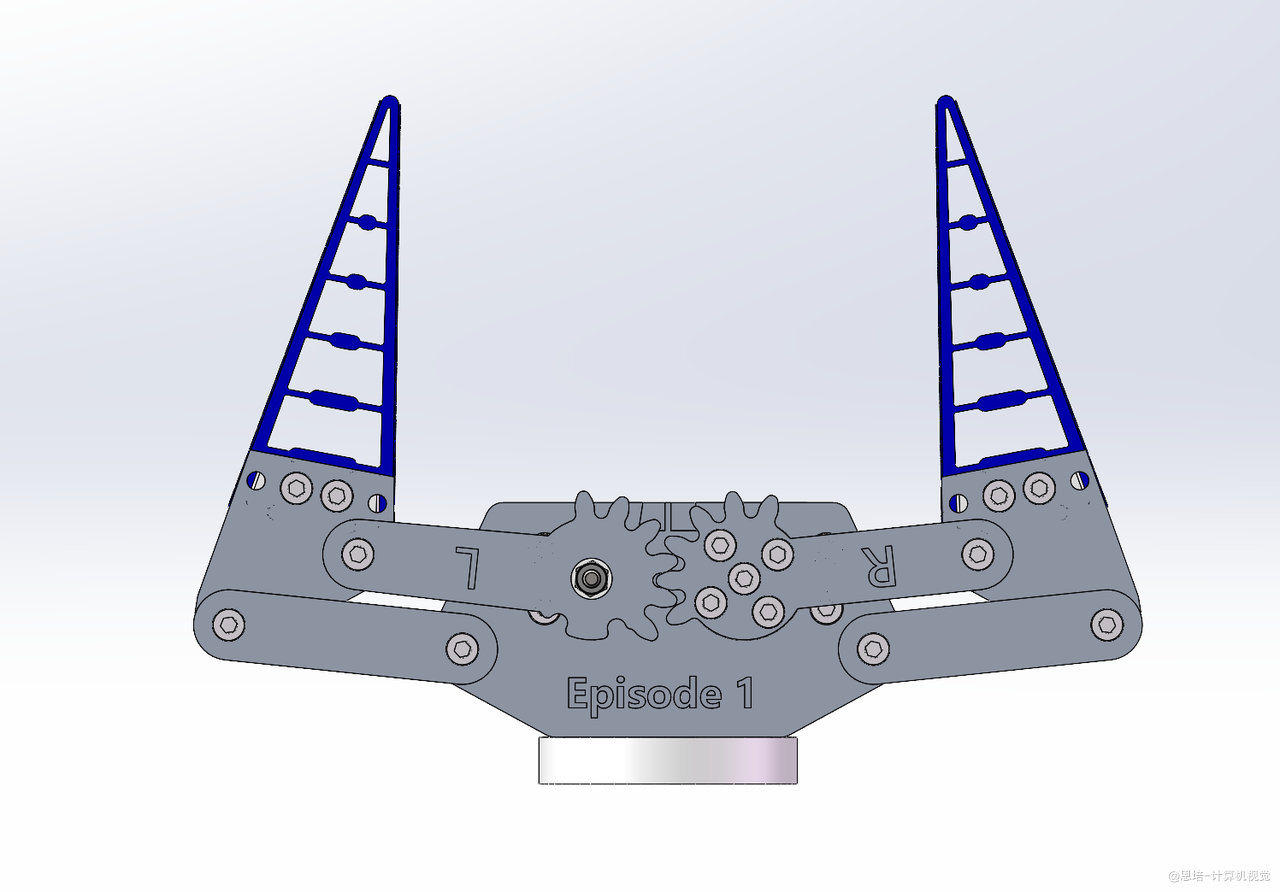
- 将左连杆和右连杆内侧(标黄区域)边缘与后面主支架面(标黄区域)大致垂直
-
上紧舵盘螺丝 M3x14(30043)
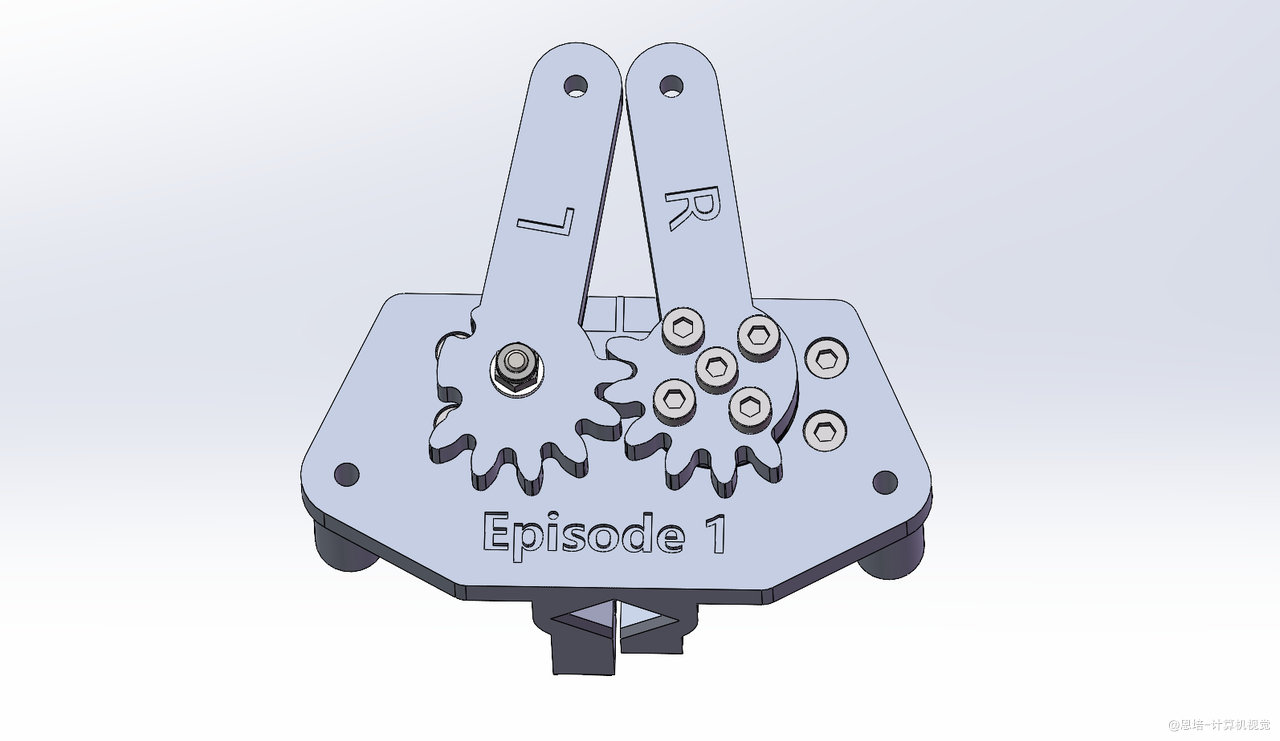
-
再将舵机往左拨,使齿轮尽量啮合,同时紧固固定舵机的四个 M3 螺母
-
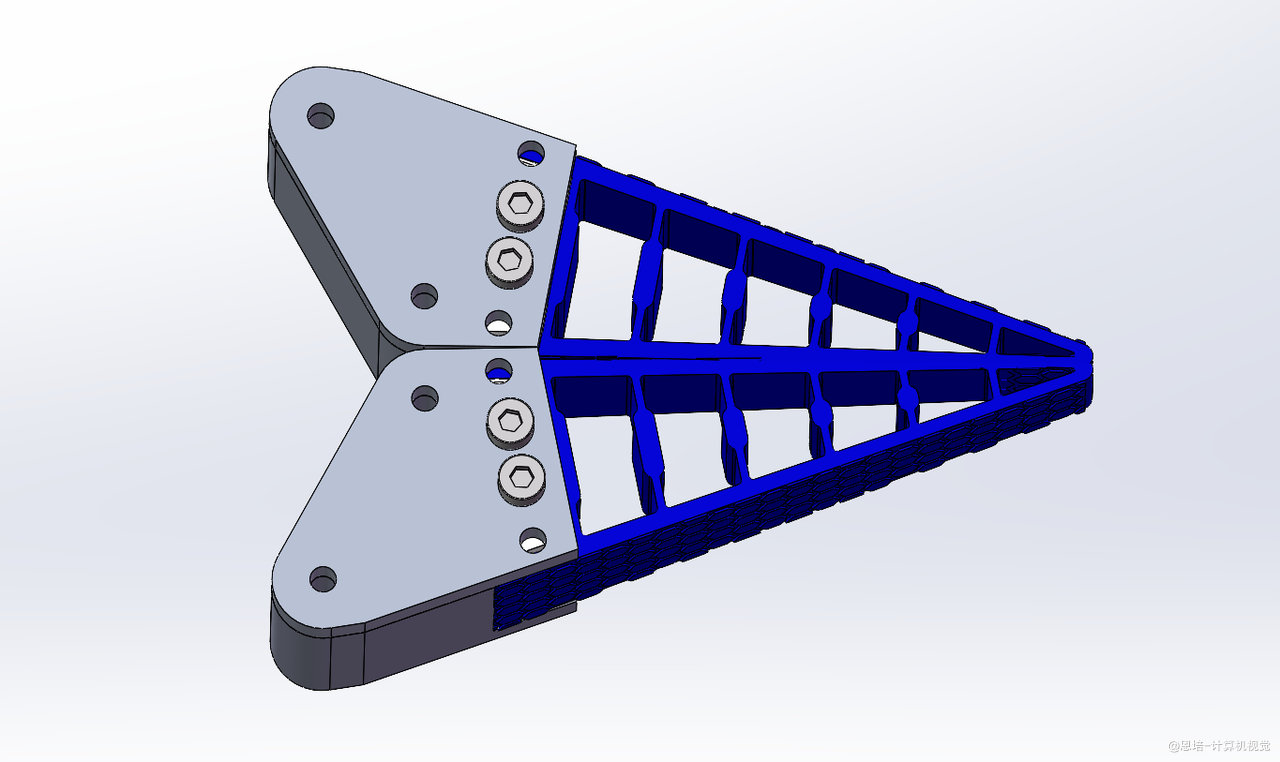
装好柔性夹爪
四根螺钉:M3 x 30(30038)
-
装好剩下部分
-
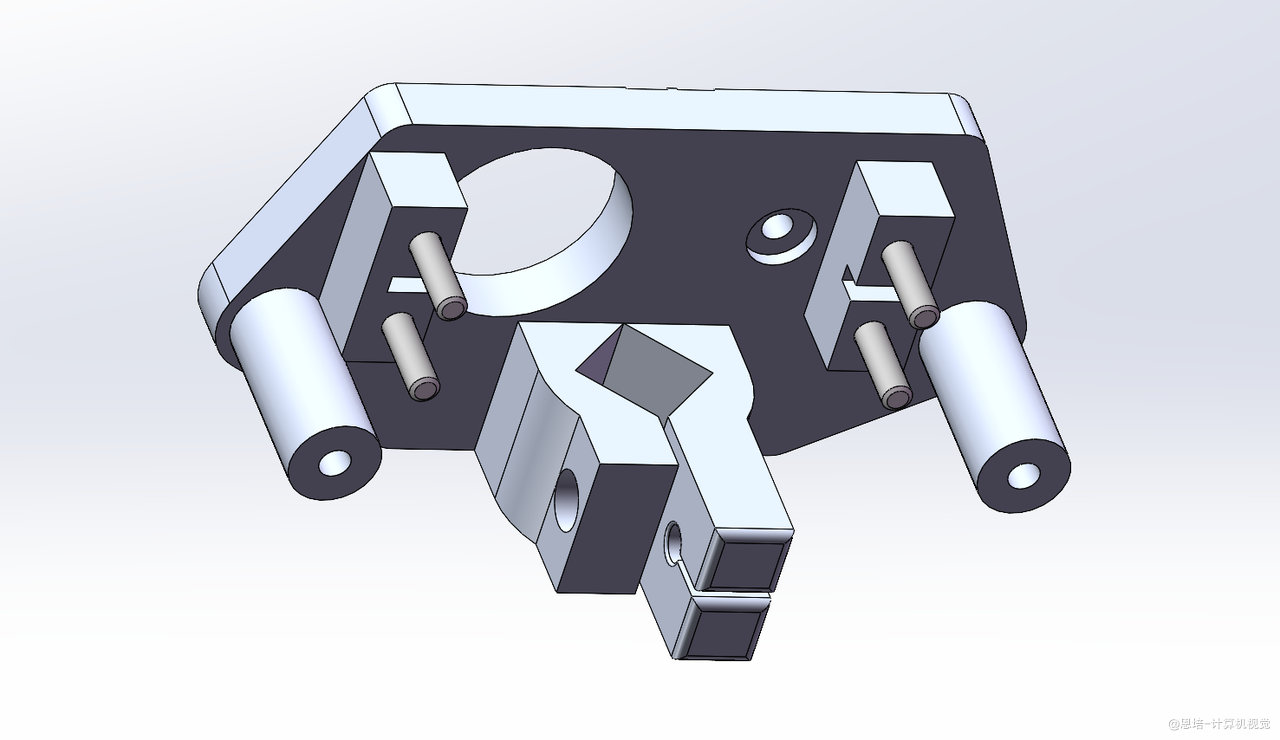
将下图夹爪端侧安装在机械臂末端法兰
四根螺丝:M3x8(30044)
-
将 M3x14 和螺母嵌入相机支架螺丝孔:

-
最终效果图:
注:配套相机支架仅适配 D435 深度相机。若后续课程使用其他型号,我们将提供对应支架设计方案。
4. 测试
请先将校准测试上位机更新到 V0.9.2 以上
4.1 负压吸盘测试
使用测试校准上位机(去资料中心下载) - 夹爪控制,测试负压吸盘是否正常,比如可以用它抓取表面平整的物体(如手机)、再释放看看是否正常。
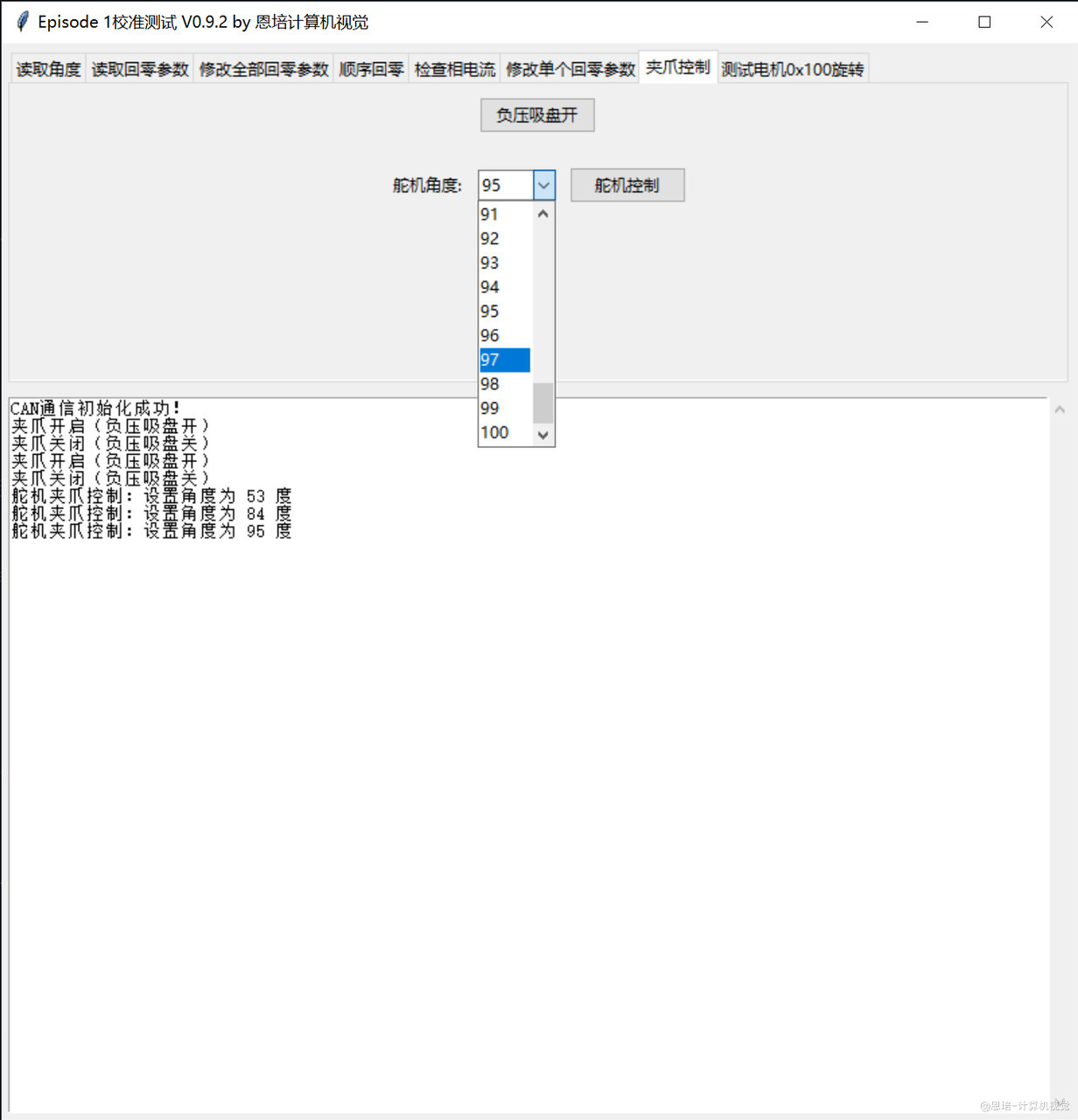
4.2 舵机夹爪测试
舵机由 0 度增大后,夹爪会抓紧:
| 舵机 0 度位置 | 舵机夹紧位置(约 90 度) |
|---|---|
 |
 |
- 我们需要:
- 找到一个临界角度,可以使夹爪抓紧
- 同时防止舵机堵转电流过大,发热严重,损坏舵机,所以这个临界角度不能过大
- 为了找到这个边界角度,我们可以使用测试校准上位机:
- 如果你按照前序标准步骤安装,舵机运转到 90 度已经接近临界角度
- 你可以每次加 1~2 度的方式找到这个临界角度,以后使用中,尽量不要长时间超过这个角度(比如我的是 95 度左右)
- 其他补充信息:
- 使用 API 调用舵机夹爪,范围是:0~110,超过会自动截断