1.2 机械臂(6-DOF)调试校准教程
- 本文档需要配套对应视频观看,请联系助手获取视频(微信:ffcv1024)
- 调试校准使用场景:机械臂首次组装成功、机械臂成品出现工作异常
1. 装 CAN 通信模块、修改驱动板参数
找出以下零件备用:
| 零件编号 | 名称 | 数量要求 |
|---|---|---|
| 10084 | 包线管 | 0.6m |
| 10073 | 12V 电源 | 1 |
| 10006 | 自攻螺丝 M6×16 | 4 |
| 10050 | 螺钉 M6×16 | 4 |
| 10019 | J5 盖子皮带面 | 1 |
| 10020 | J5 盖子接线面 | 1 |
| 10024 | J4 盖子 | 1 |
| 10045 | J6 盖子 | 1 |
| 10005 | 自攻螺钉 M2×8 | 17 |
-
插上 12V 电源(10073),按下按钮开关,6 个电机驱动板应该亮灯。
-
修改驱动板参数:
按照视频,按 1~6 顺序调整每一个电机驱动的参数。
J1 表示第一个电机。
其他参数不要修改,如果不小心修改,可以恢复出厂设置(需要注意,恢复出厂设置后,电机需要重新校准,校准时电机会正反方向各旋转几周,可能需要拆掉对应机构让电机自由运动)。
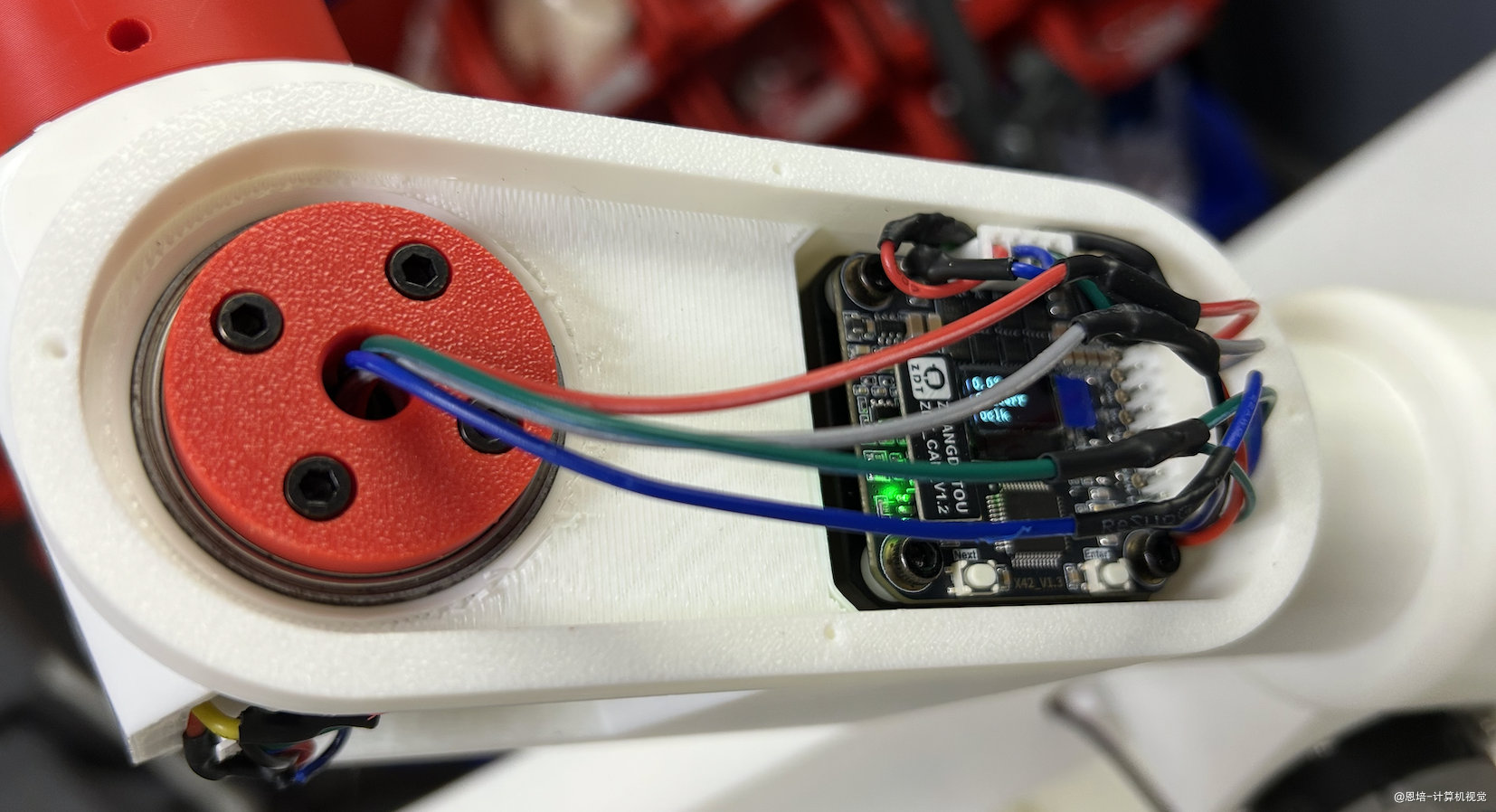
固定底座驱动板可以使用一根牙签或扳手穿入预留孔修改,不要挤坏电器元件。
菜单项目 J1 J2 J3 J4 J5 J6 ID_Addr 1 2 3 4 5 6 P_serial CAN1_MAP CAN1_MAP CAN1_MAP CAN1_MAP CAN1_MAP CAN1_MAP Clog_Ma 3000 3000 3000 3000 3000 3000 Clog_Ms 6000 6000 6000 6000 6000 6000 视频教程用的是老版本驱动板 Clog_Ms 是 12000,新版本驱动板统一设为 6000
经过这样的设置后,我们就可以发送 CAN 指令控制电机了。
2. 测试连线
- 手动来回转动底座,检查线圈有无松动,没问题进行下一步。
- 拽动底座各个线圈和接头,检查有无松动,没问题进行下一步。
- 检查底部 4P 电机线是否接好
- 检查底部按钮开关的灯是否正常亮起
3. 测试校准
请严格按照下列步骤操作。
机械臂通电会锁住关节(电机使能)、断电会松开关节,操作需要注意。
-
手动轻轻来回转动各个关节,感受关节到达限位后的感觉(尤其是第 4 个关节)。
其中第 4 个关节比较脆弱,操作需要小心。因为希望尽可能增大关节旋转范围,增加运动范围,所以阻挡位置设计的较小。
如果第 4 个关节阻挡位置被破坏,你需要联系助手购买更换。
-
启动 Windows 电脑(win10 或以上),将 USB2CAN 转换器插入 USB 孔
-
在 Episode1 资料下载中心 下载 USB2CAN 驱动
-
在 Episode1 资料下载中心下载启动 校准软件
-
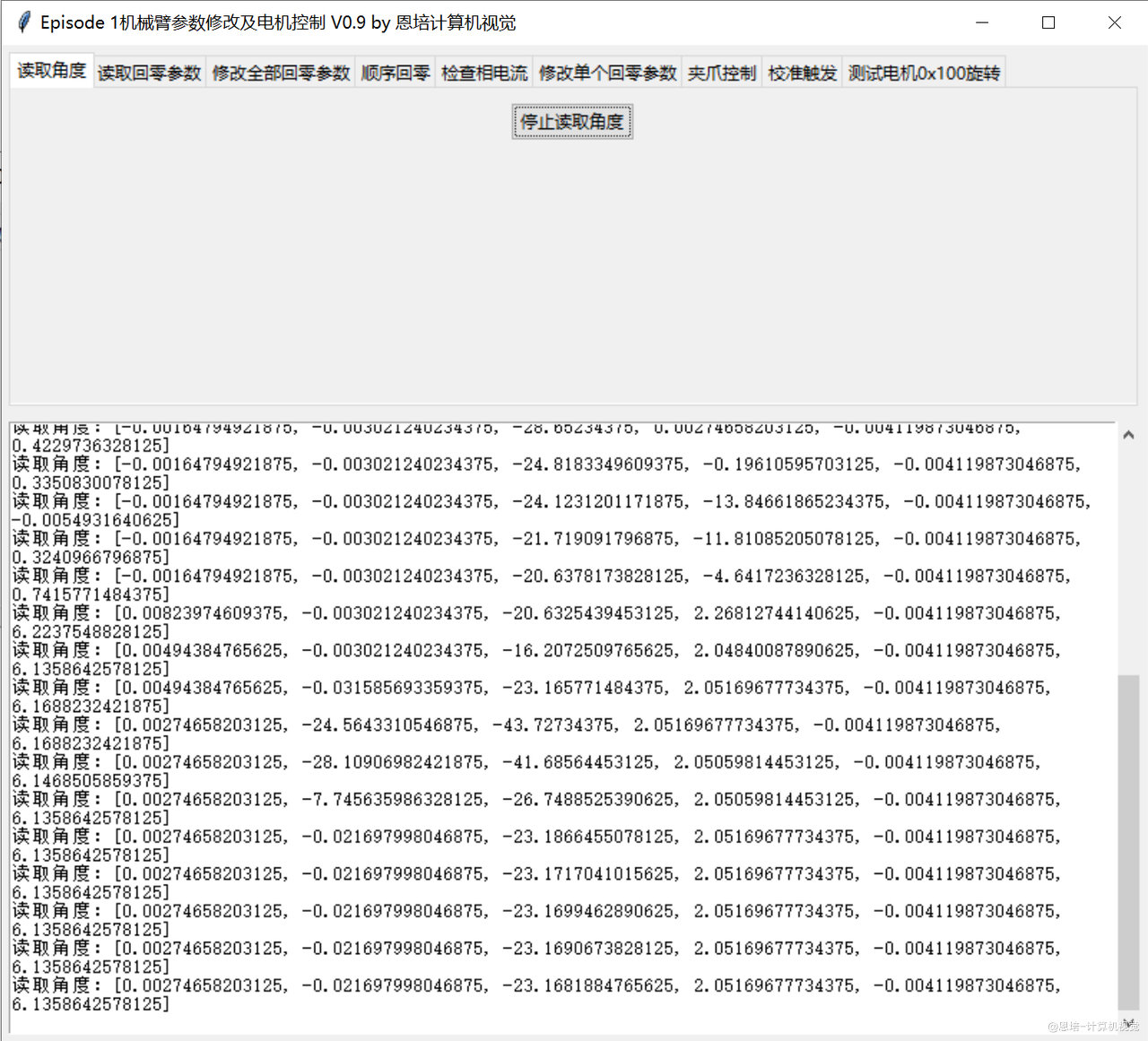
点击“读取角度”
- 动作预期:会解锁关节,可以手动旋转,软件会有 6 个关节的角度值,旋转各个关节,角度会变化。
- 异常:如果存在 None 值,则对应关节连线或安装有问题,需要中断检查。
- 点击"停止读取角度",会重新锁住关节。
- 没问题,继续下一步。
-
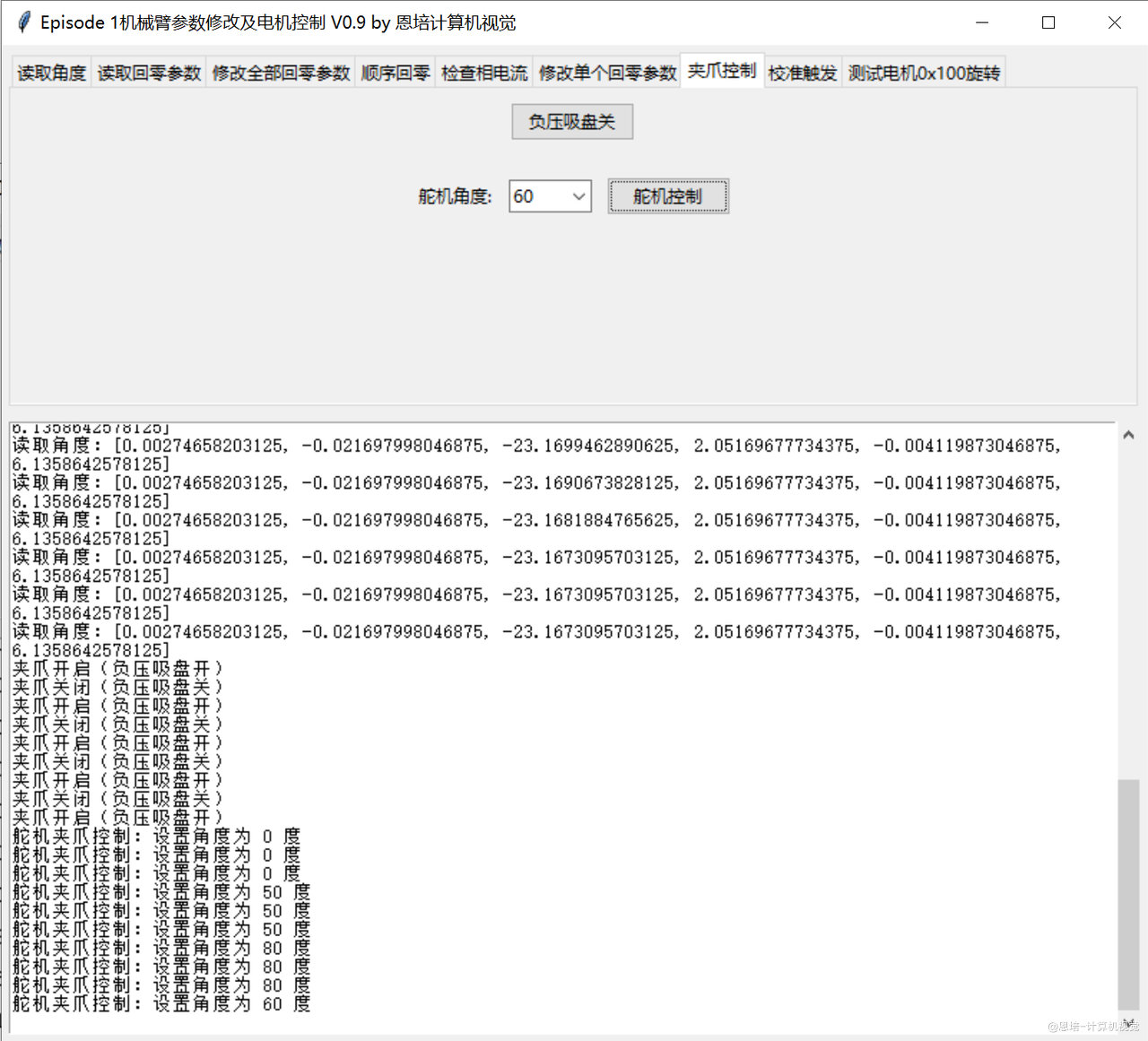
点击“夹爪控制”(无夹爪套餐的,可以忽略这一步)
- 动作预期:
- 点击负压吸盘开关,负压吸盘会开启或关闭
- 选择舵机角度,点击舵机控制,舵机夹爪会张开对应角度
- 没问题,继续下一步。
- 动作预期:
-
以上步骤没问题,说明连线没有问题,现在可以再次确认:
- 腰关节侧 1 根紧定螺钉(固定法兰)
- 腰关节上 2 根 M5x50、2 根 M5x25
- 大臂与腰部、小臂固定对接位置是否缝隙太大
- 大臂 2 根紧定螺钉
- 腕部端侧安装面 2 根紧定螺钉
-
卸掉小臂旋转 60 齿同步轮、J5 轴承盖子螺钉,稍用力掰开小臂旋转,使腕部可以旋转活动,再重新拧上螺丝
这时候螺丝就装上即可,不用拧紧,否则又夹紧腕部了。
-
每个关节上润滑油,来回转动关节浸润
-
设置回零参数:
-
了解回零原理:我们使用碰撞回零,也就是机械臂开机时各关节会依次往碰撞限定位置转动,碰到这个限定位置就到达零点。所有关节到达零点的状态如下(底座闸门在正右方):
-
回零条件:电机转速 < 碰撞回零检测转速 && 电机相电流 > 碰撞回零检测电流 && 持续时间 > 碰撞回零检测时间。
- 电机相电流:回零运动中,电机实际的相电流,变化值。
- 碰撞回零检测电流:设置的固定值
我们使用碰撞回零,其中会出现判断问题的主要是这个条件:电机相电流 > 碰撞回零检测电流 这个条件。
- 电机还没到达回零位置,就满足 电机相电流 > 碰撞回零检测电流,所以提前结束回零。
- 原因:电机相电流过大(阻力大)、 碰撞回零检测电流设置过小(可以调大一些)
- 电机到达回零位置,还不满足 电机相电流 > 碰撞回零检测电流,始终无法结束回零。
- 原因: 碰撞回零检测电流设置过大(可以调小一些)。
-
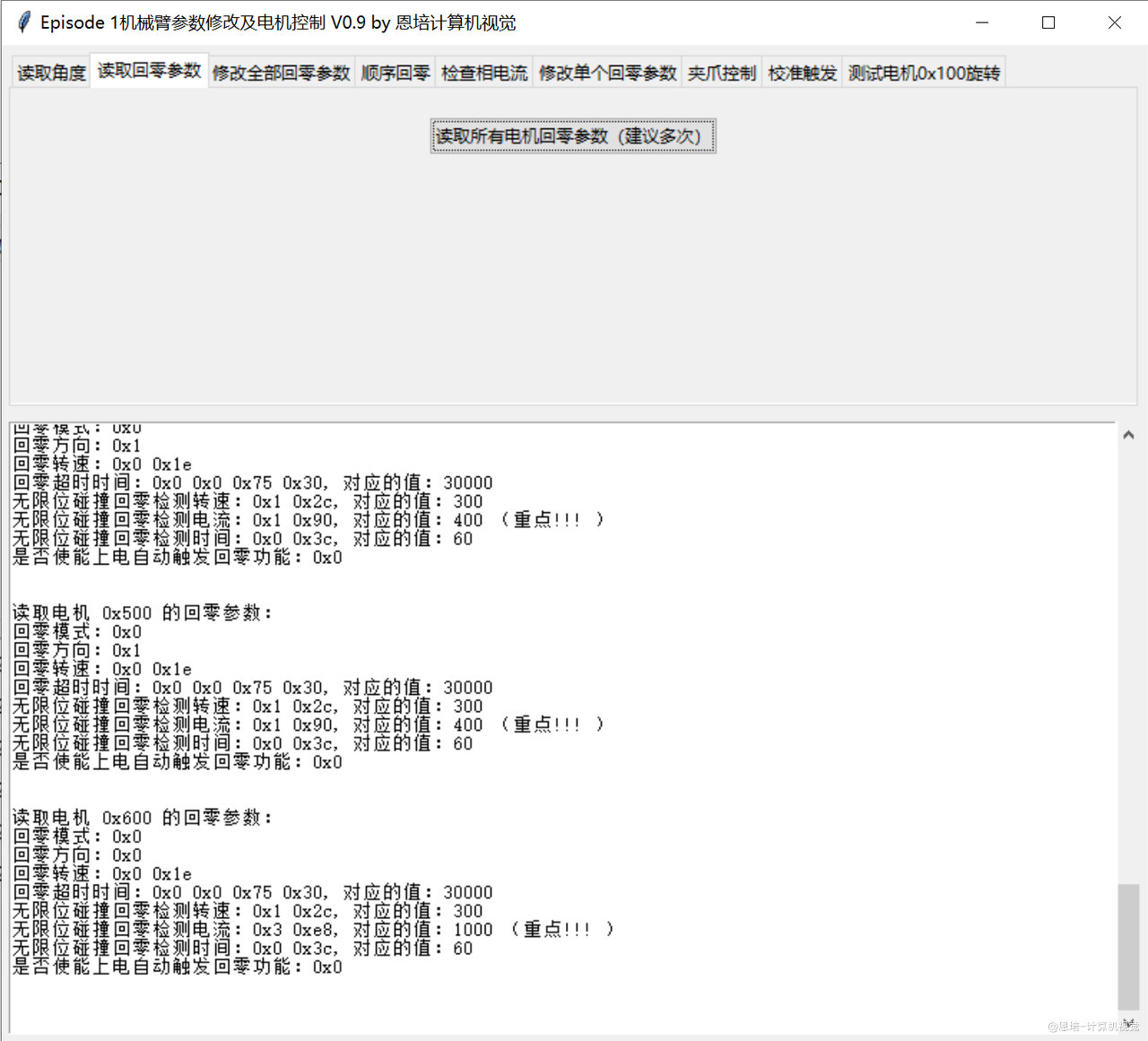
先点击“读取回零参数”,查看并记住各个电机的碰撞回零检测电流(有“重点!!!”结尾的那一行)
一般出厂的碰撞回零检测电流是是 800Ma
如下方的 0x600(第 6 个电机)的碰撞回零检测电流是 1000Ma
可以多点击几次,查看最后一次记录,一般比较准确
-
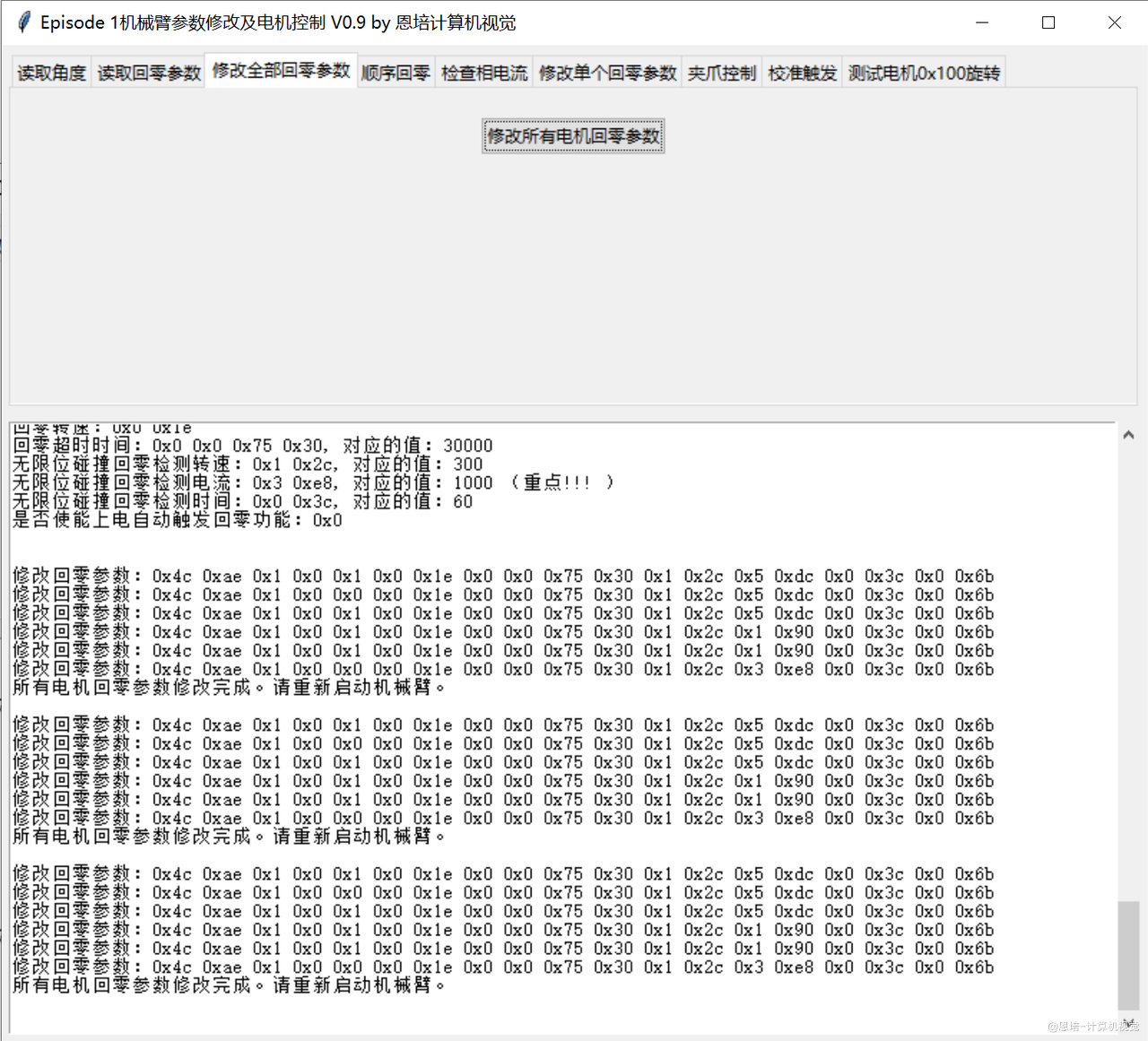
再点击“修改全部回零参数”
如担心未生效,可多点击 2~3 次。
-
重启机械臂,使变更生效
-
再点击“读取回零参数”,看看碰撞回零检测电流有没有变更成功:
1~6 电机变更后的碰撞回零检测电流分别是:1500、1500、1500、400、400、1000。
这个是我测试的理想值。
-
没问题,进行下一步。
-
-
关闭机械臂,将机械臂关节手动调节到各个中间角度位置(为了测试回零功能,给足回零空间)
-
开启机械臂
-
点击“开始顺序回零”,观察各个关节是否按顺序到达回零位置

-
如果没问题,跳到组装剩余零件环节。
-
如果有关节回零状态不正常:
-
先校准对应电机
- 在驱动板上选择校准菜单(
cal)对电机进行校准- 注意:需要给电机留足运动空间,1~4 电机有减速器,运动空间较小,5 电机需要移除同步带再校准,6 电机需要移除端面再校准
- 校准成功后重启机械臂
- 重新回零看看是否正常,如果不正常进行下一步。
- 在驱动板上选择校准菜单(
-
电机还没到达回零位置,提前结束回零
-
原因:电机相电流过大、 碰撞回零检测电流设置过小。
-
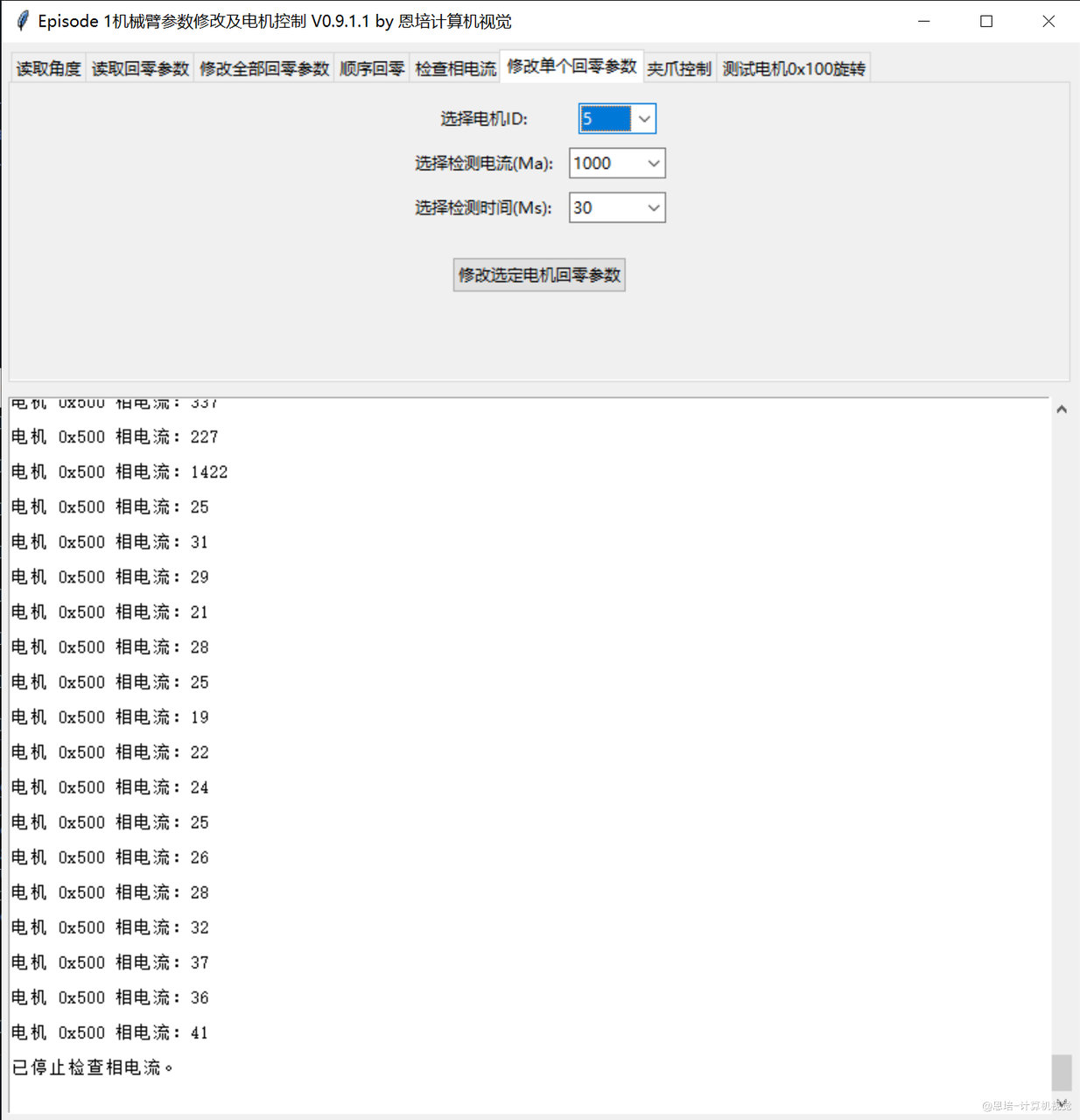
方案:使用“修改单个回零参数”调大 碰撞回零检测电流设置,重启生效配置,再测试回零,还不行进行下一步
为了保护电机,软件限制了碰撞回零检测电流最大值:第 1、2、3 电机最多 2000Ma,第 4 电机最多 400Ma、第 5、6 电机最多 1000Ma。
-
对应关节加润滑油,看情况需要松螺丝。
-
-
电机到达回零位置,始终无法结束回零
-
原因:碰撞回零检测电流设置过大。
-
方案:
-
使用 “检查相电流” 检查对应关节到达回零位置突变电流
比如我这个第一个关节,突变电流是 1088
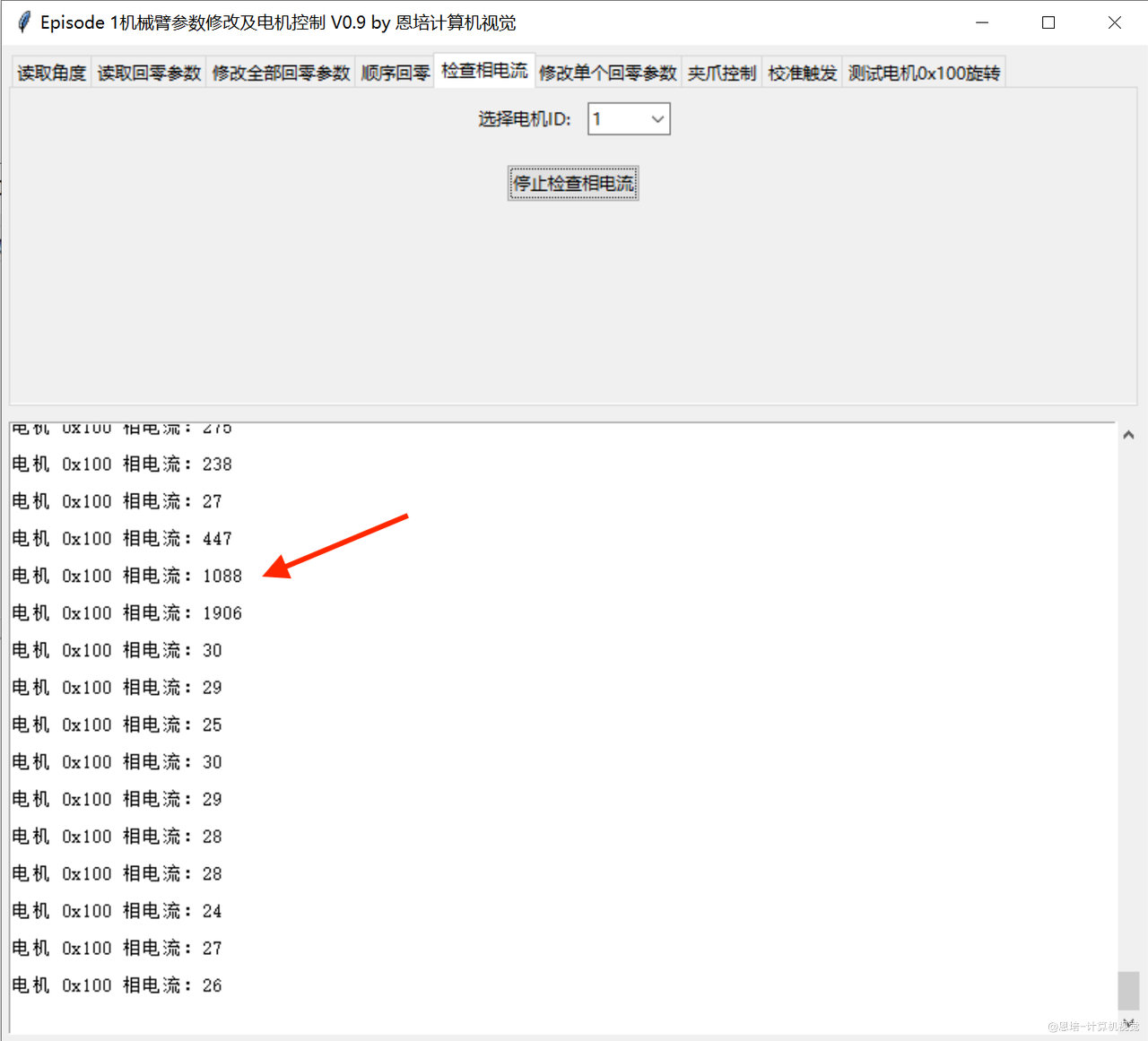
- 使用“修改单个回零参数”调小 碰撞回零检测电流设置,重启生效配置,再测试回零
-
-
-
-
4. 组装剩余零件
- 将 J1 底座闸门用 2 根 M3x10 螺钉(10062)紧固在固定底座
- 如果前序测试工作都验证没有问题,我们可以使用自攻螺钉 M2×8(10005)将各种盖子固定住好
- 然后使用包线管(10084)将漏出线缆包裹住
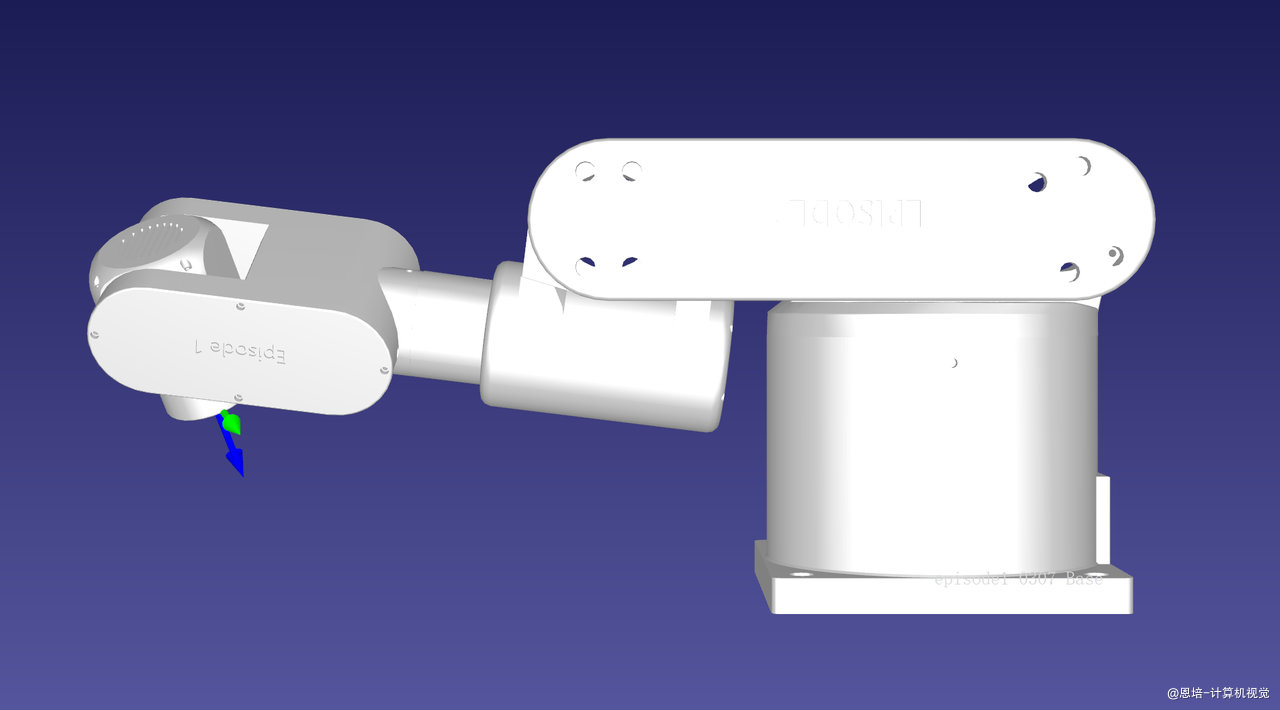
- 组装完你应该可以得到如下效果图:
