3.1 为什么要学 ROS2
大家好,从今天开始,我们将开始学习《ROS2 机械臂 + 视觉实战》这门课程。
一、为什么学习 ROS2?
1.1 机器人开发的挑战
机器人系统是一个高度复杂的工程,需要精准协调多个子系统:
| 核心优势 | 配图说明 |
|---|---|
| 解决复杂协调难题机器人开发需要同时精准控制:电机(Actuators)、传感器(Sensors)、控制系统(Control System)、电池管理、实时通信等多个模块。ROS2 提供统一的框架,让这些模块通过 Topic 和 Message 机制无缝协同工作。 | 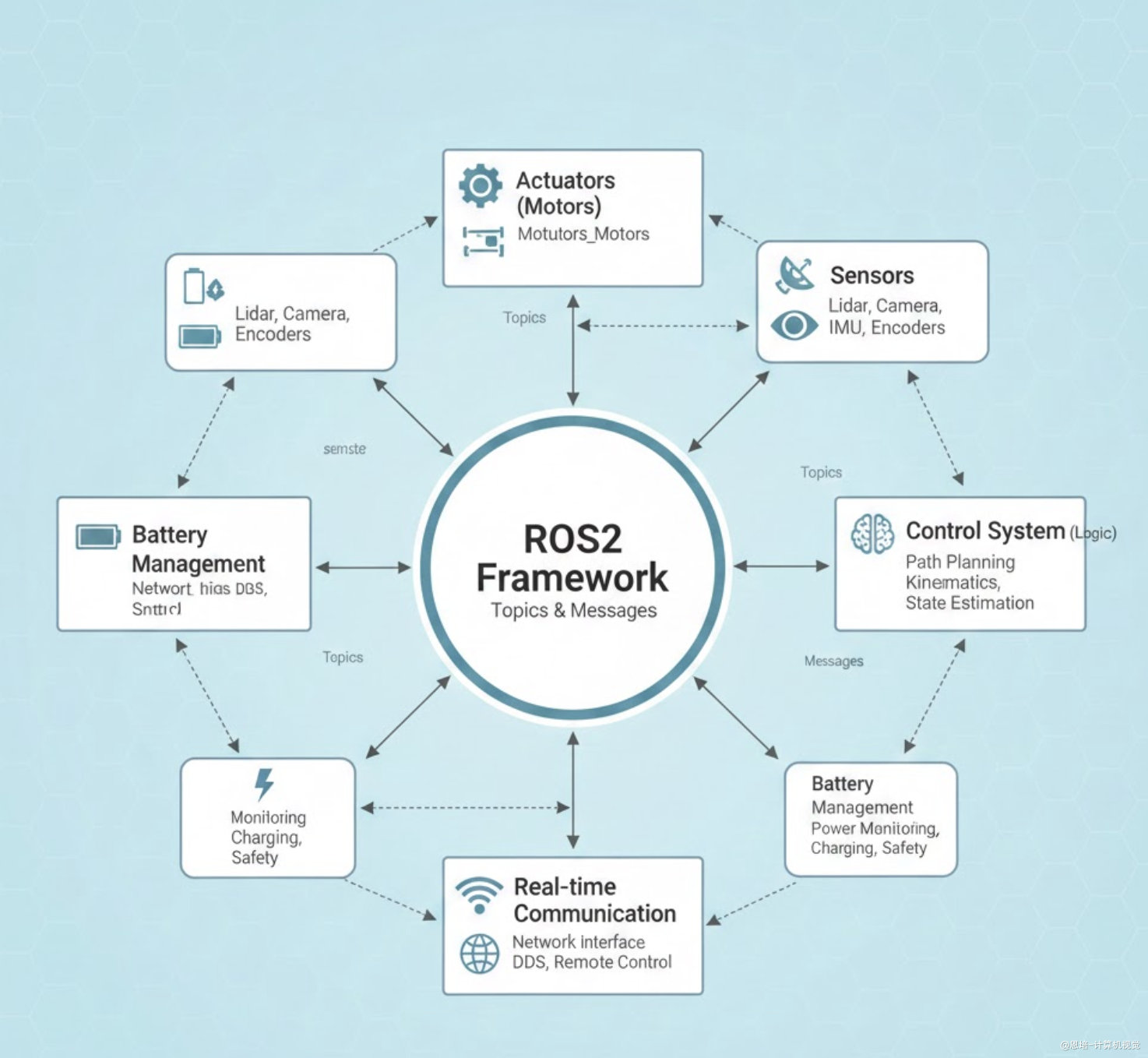 |
| 避免重复造轮子 ROS2 提供了丰富的现成组件、标准接口和工具链(如 MoveIt2 运动规划、Nav2 导航、TF2 坐标变换等),让你专注于业务逻辑,而非底层实现。 | 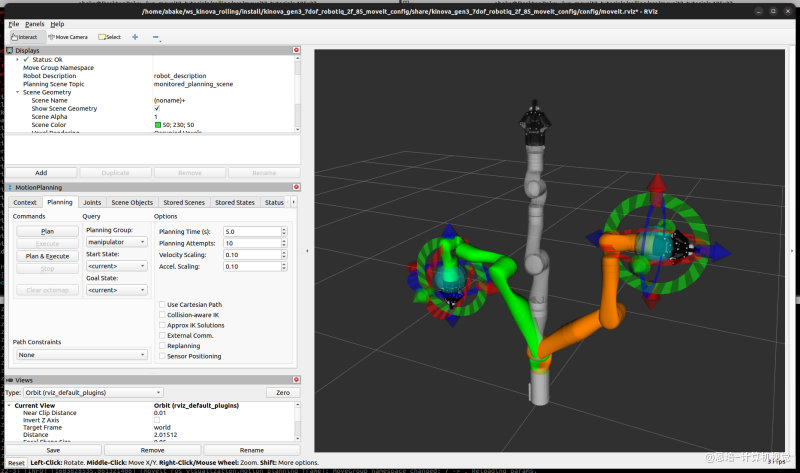 |
| 三大核心模块快速集成传感器(Sensors)→ 控制系统(Control System)→ 执行器(Actuators)的数据流通过 Topic 自动连接,消息类型统一标准化,大幅降低集成成本。 | 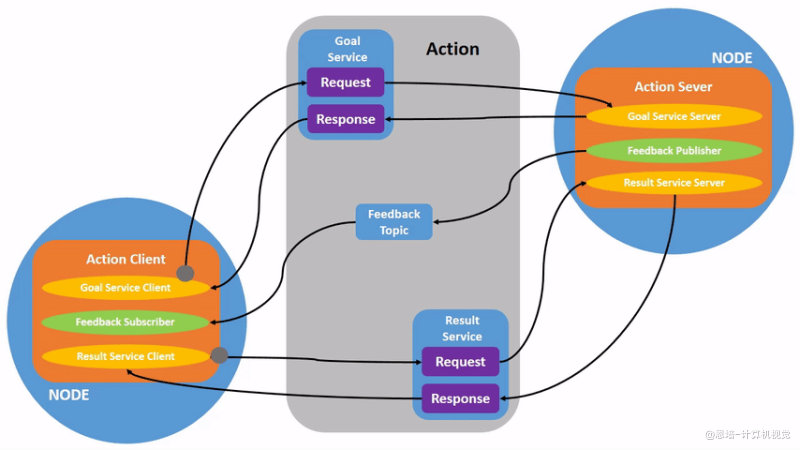 |
| 完善的测试与调试体系 ROS Bag 记录所有消息,可回放测试;日志系统完整追踪运行状态;支持硬件在环测试(HIL),确保系统质量。 | 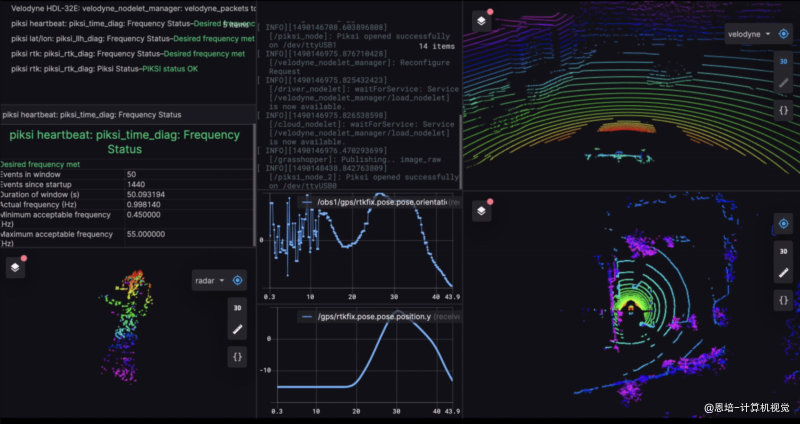 |
| 强大的可视化与仿真能力 RViz2 实时可视化机器人状态、传感器数据、坐标系;Gazebo 仿真环境验证算法;rqt 工具集监控系统健康状态。 | 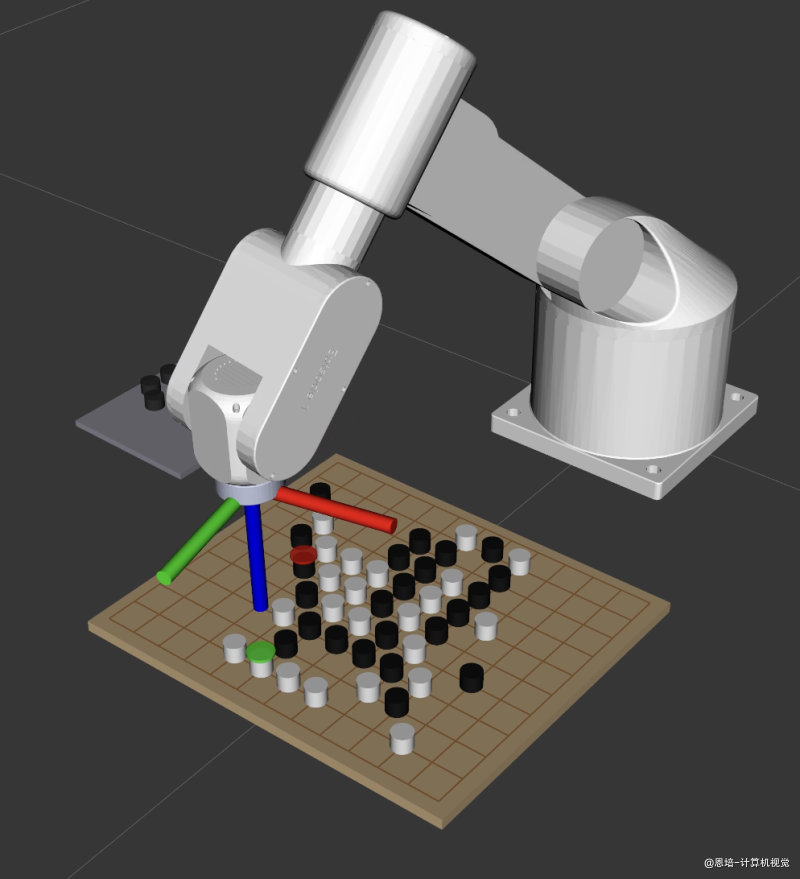 |
| 广泛的硬件生态支持原生支持主流相机(RealSense、ZED)、激光雷达(Velodyne、Ouster)、电机控制器(CAN、Modbus)、IMU、机械臂等,即插即用。 | 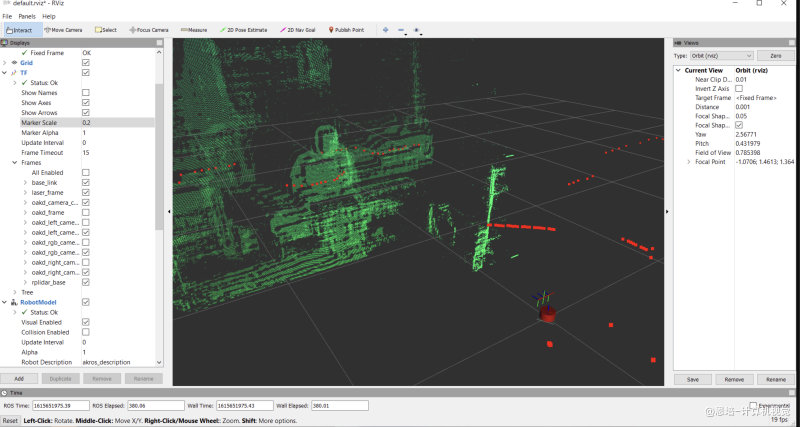 |
1.2 ROS2 的技术优势
在 ROS1 的基础上,ROS2 进一步提升了工业级能力:
| 特性 | 优势说明 |
|---|---|
| 工业级可靠性 | 支持实时系统(RTOS),满足机械臂控制的严格时序要求 |
| 分布式架构 | 基于 DDS 通信中间件,支持多机器人协同作业,无单点故障 |
| 跨平台支持 | 兼容 Linux、Windows、macOS,便于开发和部署 |
| 安全性保障 | 内置加密与认证机制,适用于商业和安全关键应用 |
| 活跃的社区 | 主流机器人厂商和研究机构都已全面转向 ROS2 |
通过本课程,你将掌握:
- ✓ ROS2 核心通信机制(Topic、Service、Action、TF2)
- ✓ MoveIt2 智能轨迹规划与避障
- ✓ 机械臂视觉控制完整项目实战
- ✓ 从概念到实际应用的完整开发流程
1.3 ROS1 vs ROS2 对比
| 特性 | ROS1 | ROS2 |
|---|---|---|
| 通信架构 | 基于 Master 节点(单点故障风险) | 去中心化 DDS 架构(无单点故障) |
| 实时性 | 不支持实时系统 | 支持实时系统(RTOS) |
| 通信可靠性 | TCP/UDP,可靠性有限 | DDS 提供 QoS 策略,可配置可靠性 |
| 跨平台 | 主要支持 Linux | Linux、Windows、macOS 全平台 |
| 安全性 | 无内置安全机制 | 支持 DDS 安全标准(加密、认证) |
| 生命周期管理 | 简单的节点管理 | 完整的节点生命周期管理 |
| Python 版本 | Python 2.7(已停止维护) | Python 3.x |
| 官方支持 | 2025 年 5 月停止支持 | 长期支持版本(LTS) |
| 多机器人 | 需要复杂配置 | 原生支持多域通信 |
| 适用场景 | 科研原型开发 | 工业应用、商业产品 |
为什么不学 ROS1?
- ROS1 官方支持已在 2025 年 5 月结束
- 主流机器人厂商已全面转向 ROS2
- 工业级应用需要 ROS2 的实时性和可靠性
- Python 2 已停止维护,ROS1 技术栈逐渐过时
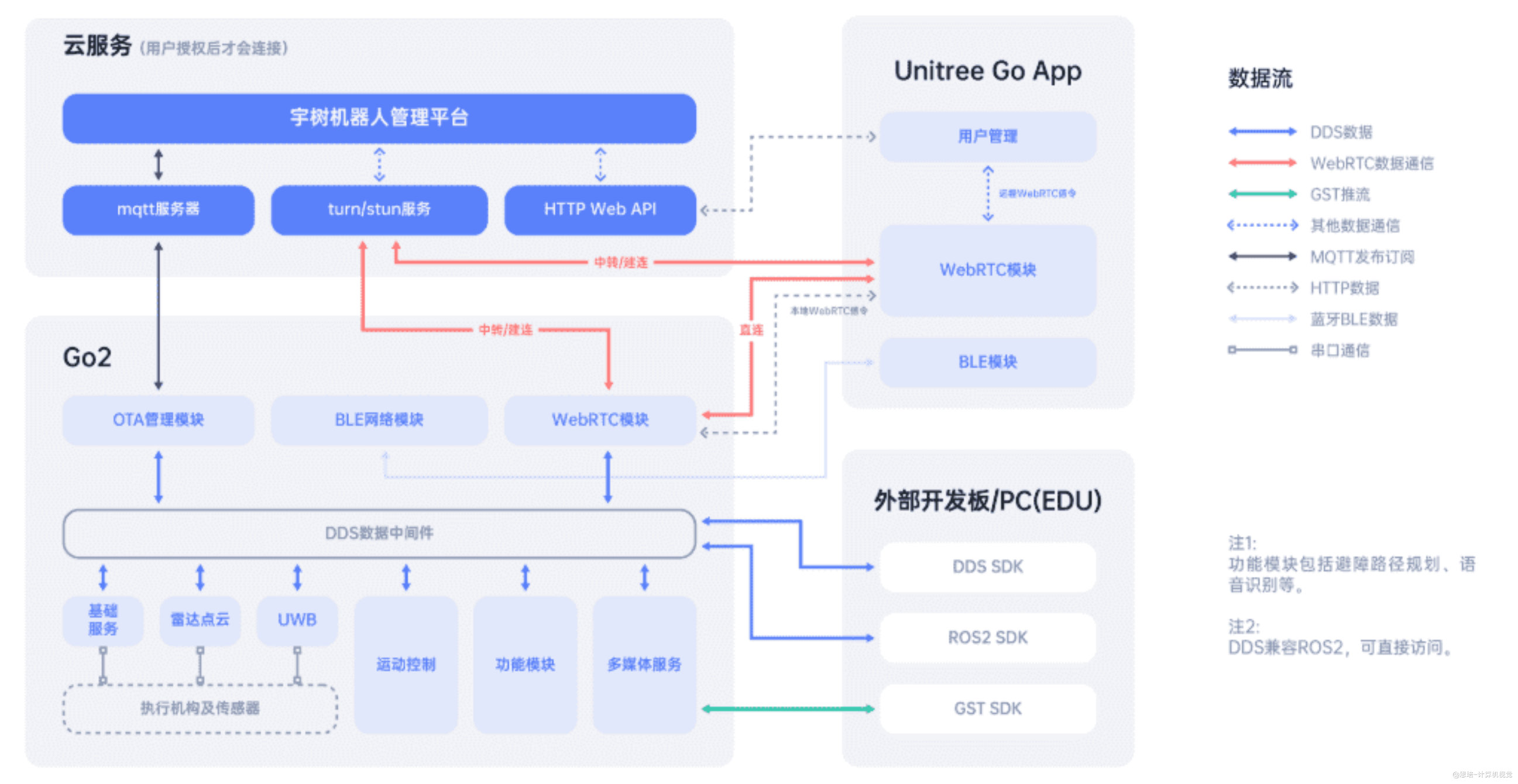
1.4 ROS2 在商业产品中的应用
主流机器人公司都已将 ROS2 作为核心开发框架,以下是两家知名机器狗公司的系统架构:
| 机器狗 | 系统架构 |
|---|---|
 |
 |
 |
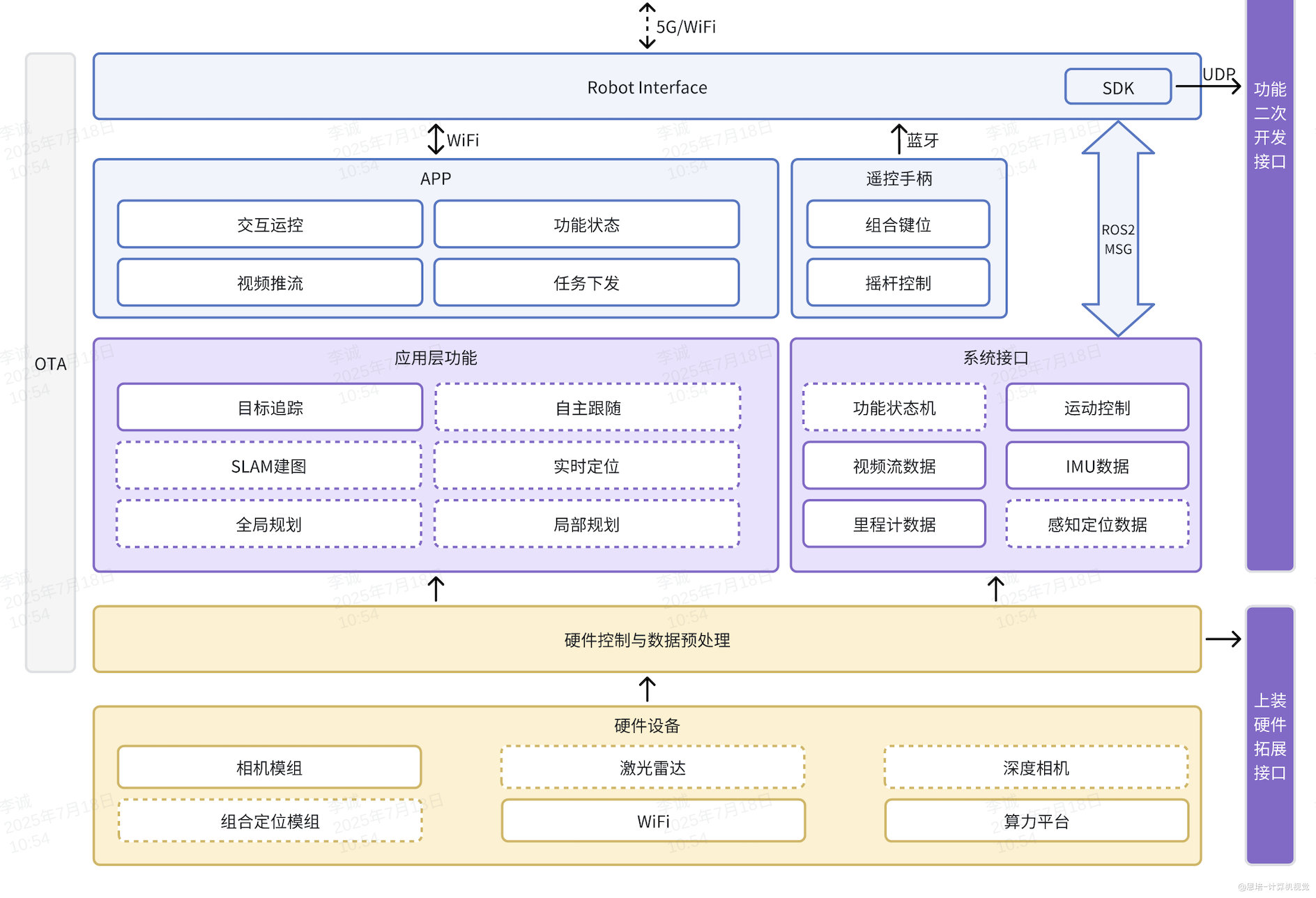 |
这些商业级产品的成功应用证明了 ROS2 在实际工业场景中的可靠性和实用性。
二、我们将如何学习?
2.1 关于本课程的定位
ROS2 是一个庞大的机器人开发生态系统,学习曲线较高,涉及的概念和工具链非常多。如果试图覆盖所有内容,那就变成了枯燥的文档翻译,反而失去了实战课程的意义。
本课程的设计理念是:我已经为你精心挑选了入门 ROS2 机械臂开发最核心、最必要的知识点,帮助你:
- ✓ 快速建立 ROS2 的核心认知框架
- ✓ 掌握实际项目中 90% 会用到的功能
- ✓ 通过真机实战加深理解,而非死记硬背概念
- ✓ 具备独立开发机械臂应用的能力
我们不追求大而全,而是精准高效——让你在最短时间内从零基础到能做出真实项目。更深入的内容,等你有了实战基础后,查阅官方文档会事半功倍。
本课程采用真机实战驱动的学习路径,分为三个递进模块:
模块一:ROS2 基础与机械臂通信
目标:掌握 ROS2 核心概念并实现机械臂通信
学习路径:
- 环境搭建:Ubuntu 24.04 + ROS2 Jazzy 配置
- 核心概念实战:
- 节点(Nodes):机械臂控制节点创建
- 话题(Topics):状态订阅与控制指令发布
- 服务(Services):同步控制请求-响应
- 动作(Actions):异步任务控制与进度反馈
- 坐标变换(TF2):机械臂坐标系管理
- 真机通信实战:
- 订阅关节状态实时监控
- 发布控制指令
- 实现位置/夹爪控制服务
- 带反馈的轨迹跟踪 Action
模块二:MoveIt2 智能规划
目标:使用 MoveIt2 实现高级轨迹规划
学习路径:
- 机械臂建模:URDF 文件解析与 RVIZ2 可视化
- MoveIt2 配置:Setup Assistant 配置与真机联动
- 规划 API 实战:
- Python API:预置点、角度、位姿模式
- C++ API:笛卡尔直线/圆弧路径
- 智能避障:静态障碍物添加与绕障规划
模块三:综合实战——人机对弈五子棋
目标:完整实现视觉-规划-控制闭环系统
实战项目:
- 视觉识别:相机标定、棋子检测、差异识别
- 坐标映射:像素 → 棋盘 → 机械臂坐标转换
- 智能规划:MoveIt2 路径规划与执行
- 系统集成:游戏逻辑与状态管理
硬件成本:普通棋盘格(¥80)+ USB 摄像头(¥150)+ 六轴机械臂(推荐 Episode1 ¥1999)
学习方式
- 代码优先:所有代码在真实机械臂上验证
- 渐进式学习:从基础通信到复杂项目,循序渐进
- 完整配套:视频教程、详细文档、URDF 模型、全部源代码
- 实战导向:每个知识点都有对应的真机实战案例
适合人群
- Python/C++ 开发者 — 想快速上手 ROS2 机器人应用开发
- 机械臂应用工程师 — 需要系统掌握智能控制与轨迹规划
- 具身智能爱好者 — 想通过完整项目入门机器人视觉与控制
让我们开始这段激动人心的 ROS2 机械臂学习之旅吧!