2.2 遥操作主臂安装
1. 遥操臂安装
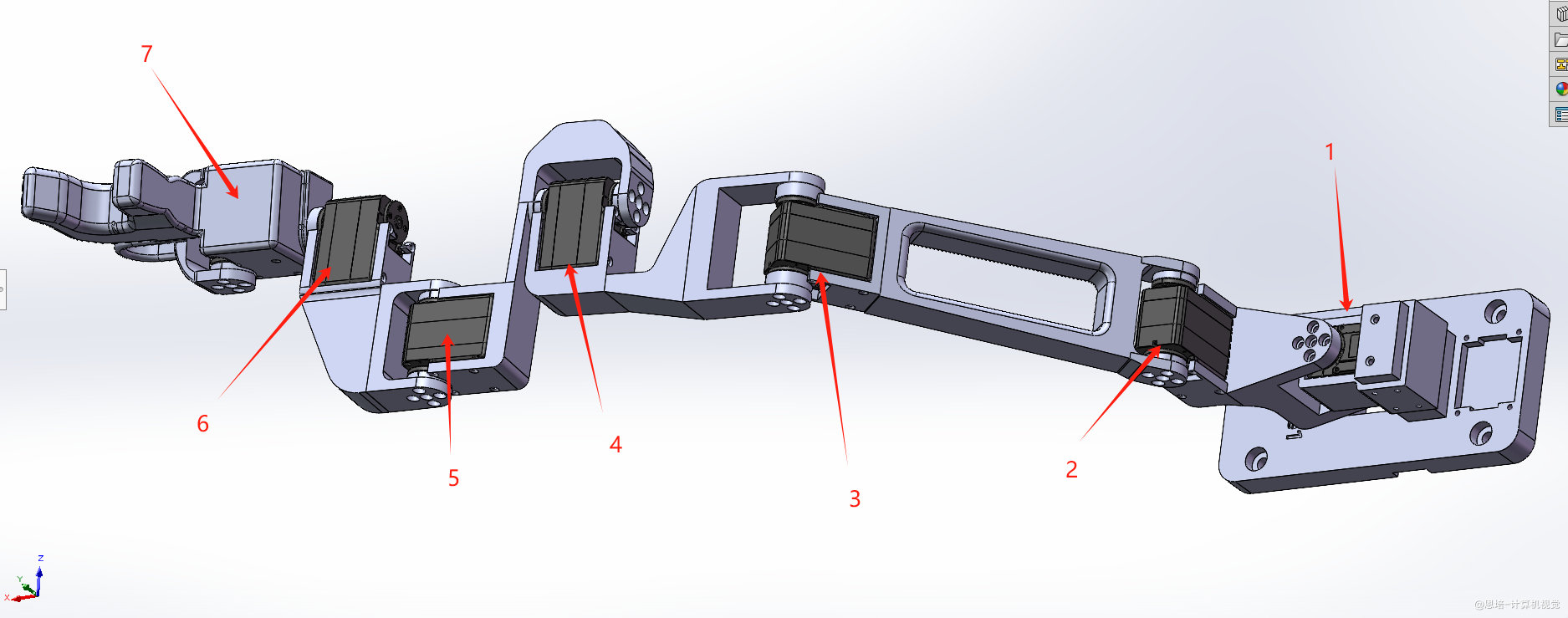
如上文所说,我们首先一个遥操作系统,它可以遥控我们的 Episode1 机械臂,并且支持 VLA 算法训练数据的采集。下图是单臂和双臂遥操系统的对比:
| 图片 | 自由度 | 相机 | |
|---|---|---|---|
| 单臂遥操系统 | 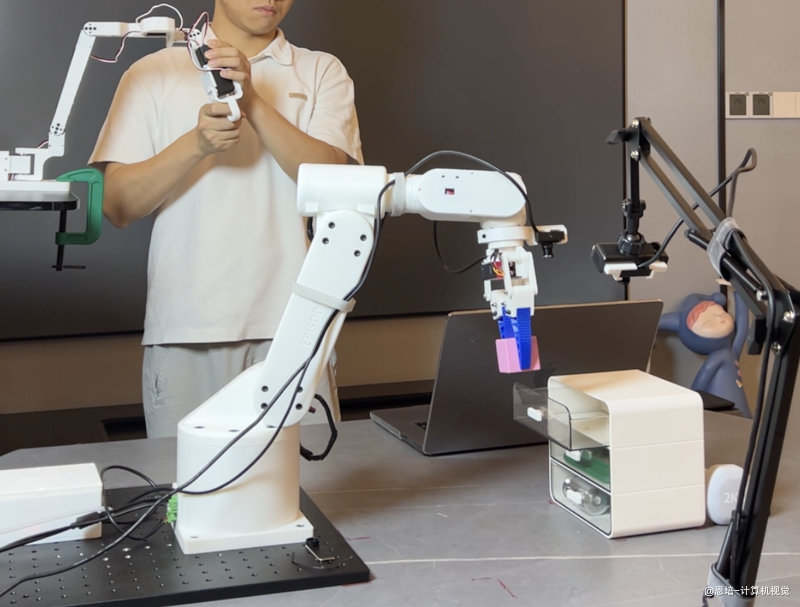 |
7 个(7 个总线舵机) | 1 个腕部 +1 个固定位 2 个 720P 广角相机 |
| 双臂遥操系统 | 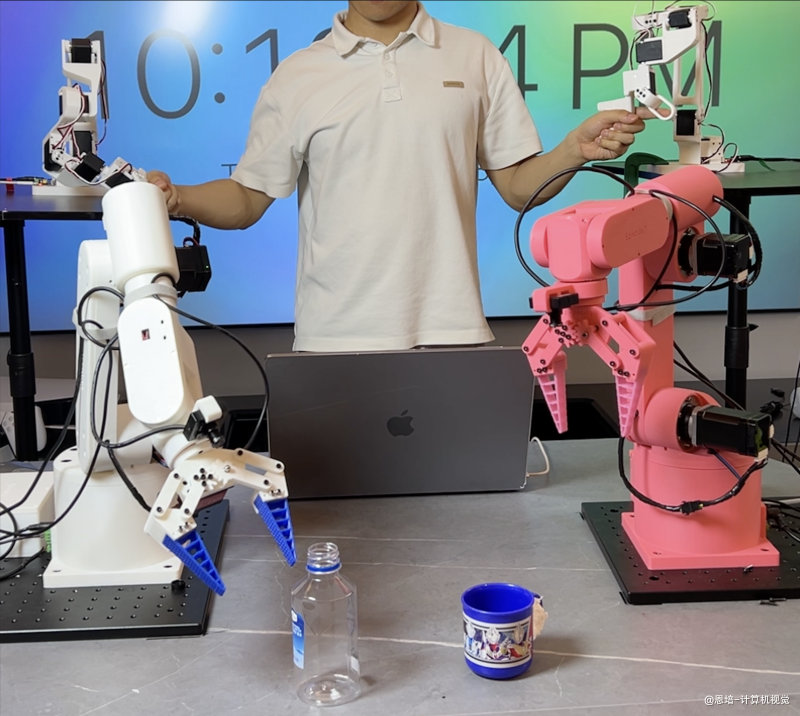 |
14 个(14 个总线舵机) | 2 个腕部 +1 个固定位 3 个 720P 广角相机 |
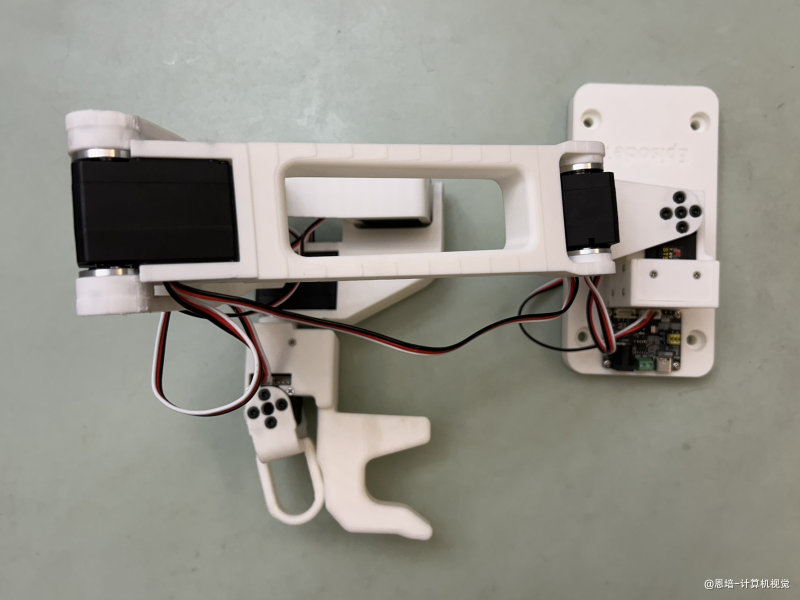
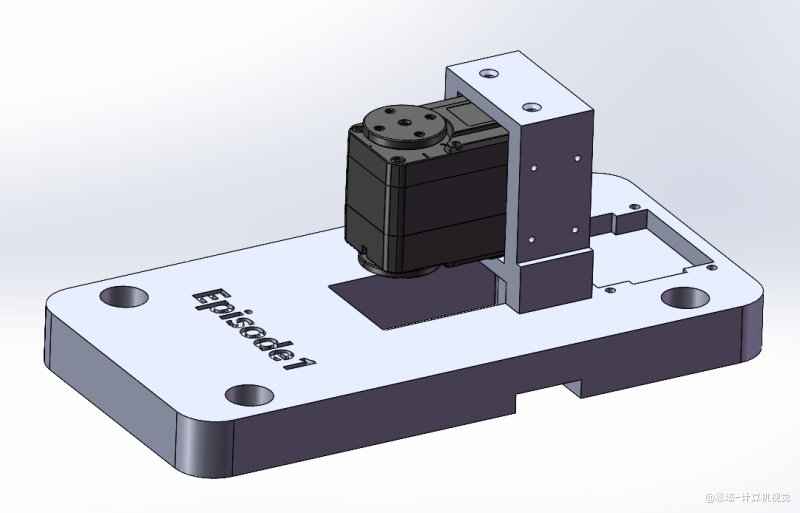
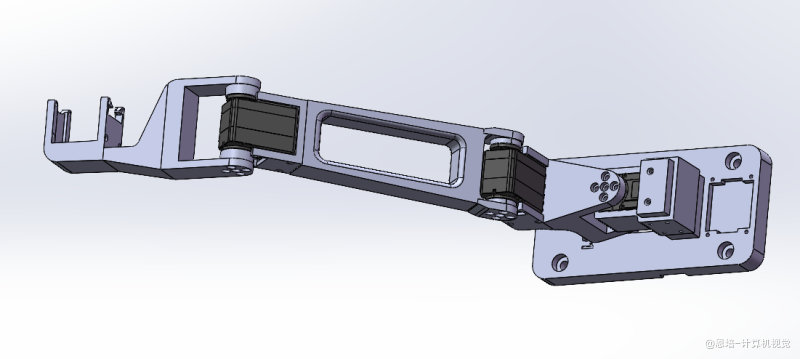
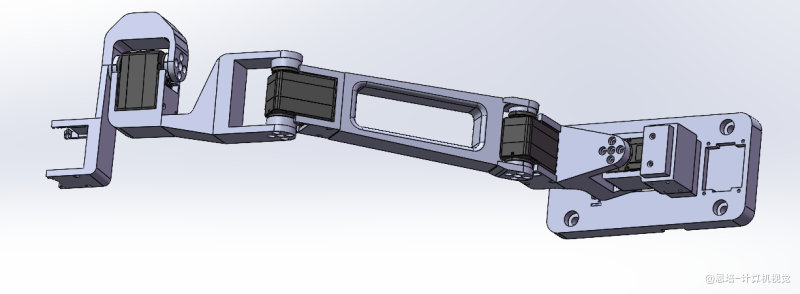
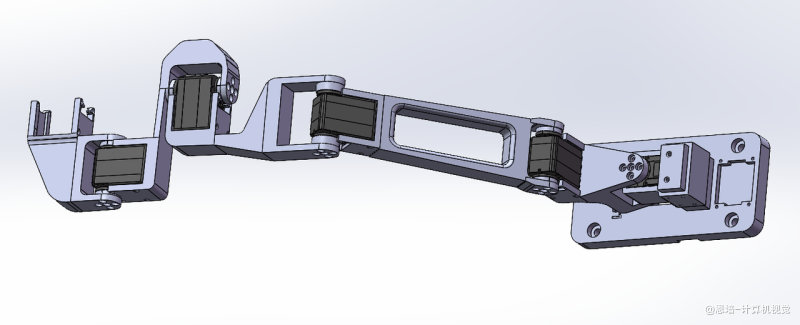
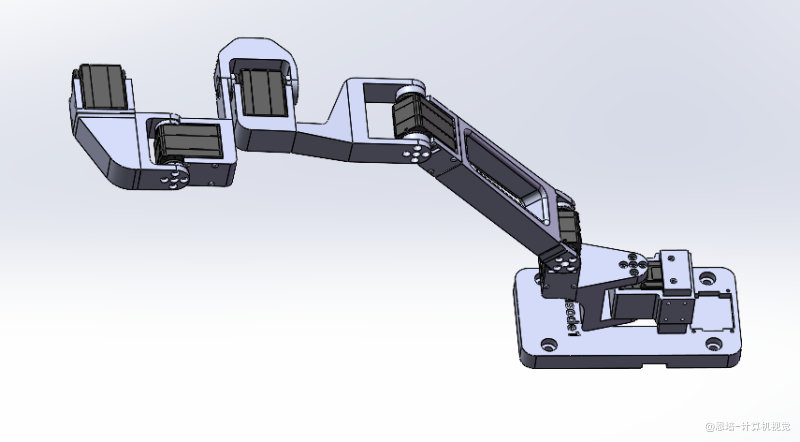
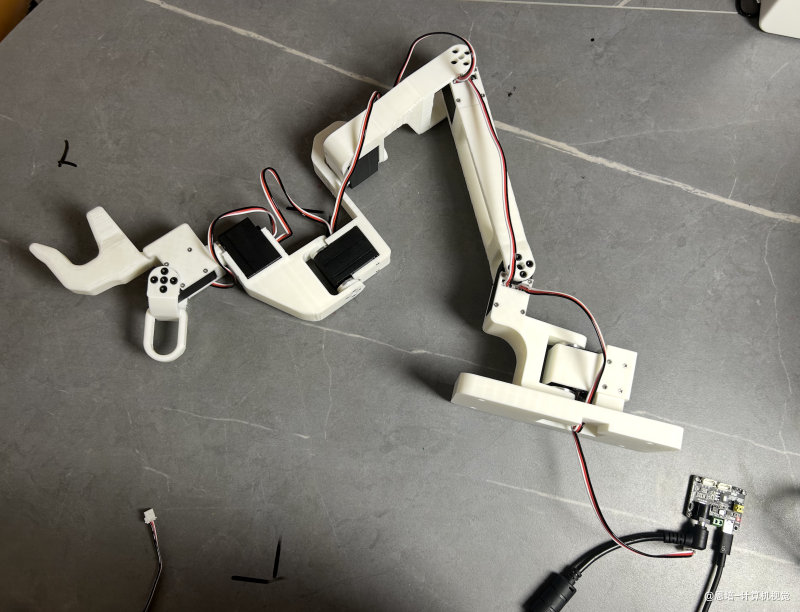
单臂、双臂安装流程是一样的,安装完,成品如下:
如果你的零件出现问题、缺陷,请联系小助理(微信:ffcv1024)更换。
!!!因为外壳是 3D 打印件,拧入螺丝的时候不要用太大力矩,防止压坏塑料。
工具准备:
| 名称、链接 | 图示 | 详情 | 作用 |
|---|---|---|---|
| 2mm 一字螺丝刀 |  |
购买链接 | 拧自攻螺丝 |
安装步骤:
| 配图 | 安装步骤 |
|---|---|
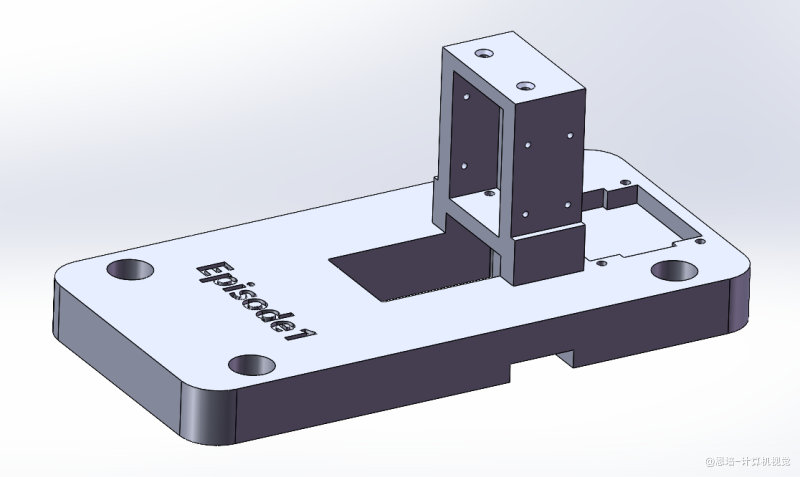 |
拿出这个零件 |
 |
拿出一个舵机,将舵盘装上,舵机配套的螺丝先不用安装 |
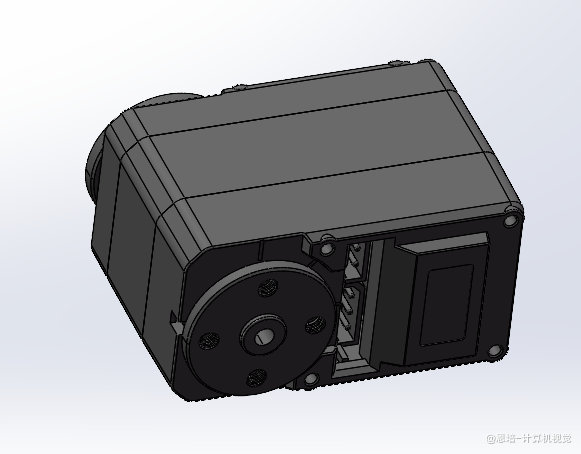 |
舵机装完舵盘的效果 |
 |
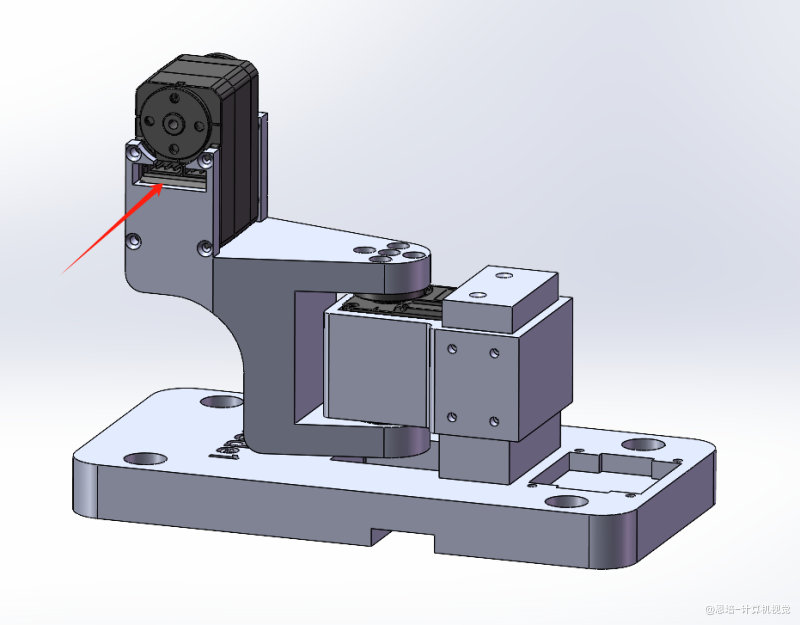
塞入舵机 |
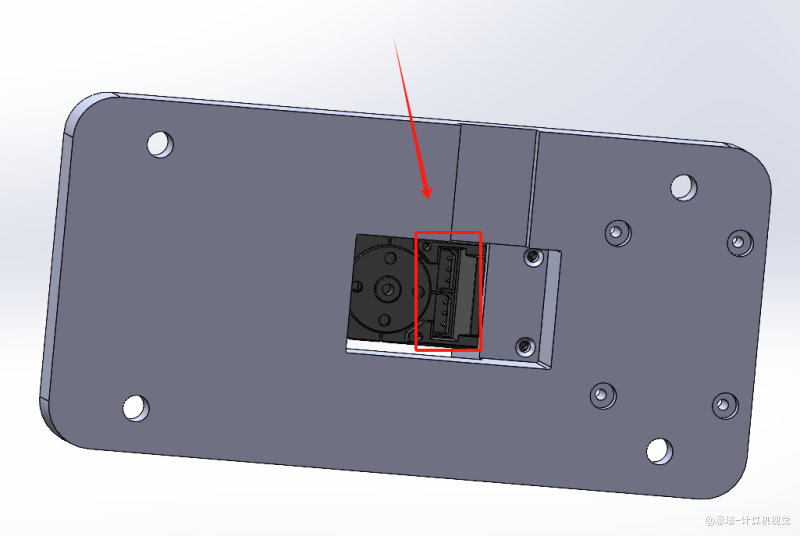 |
注意,舵机插线口朝下 |
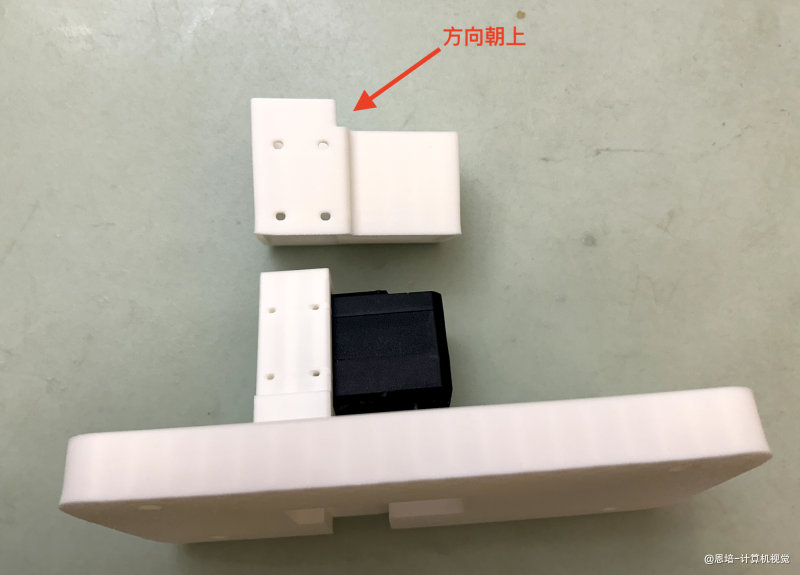 |
将舵机套塞入,用来固定舵机,注意朝向,要保证螺丝孔对齐 |
 |
使用 M2 * 10 自攻螺丝,拧入这些固定孔,一共 12 个孔 (图中的舵机套与实物不一致,实物为了塞入方便,加了一个突出) |
 |
注意不要漏掉底部的 2 个孔 |
 |
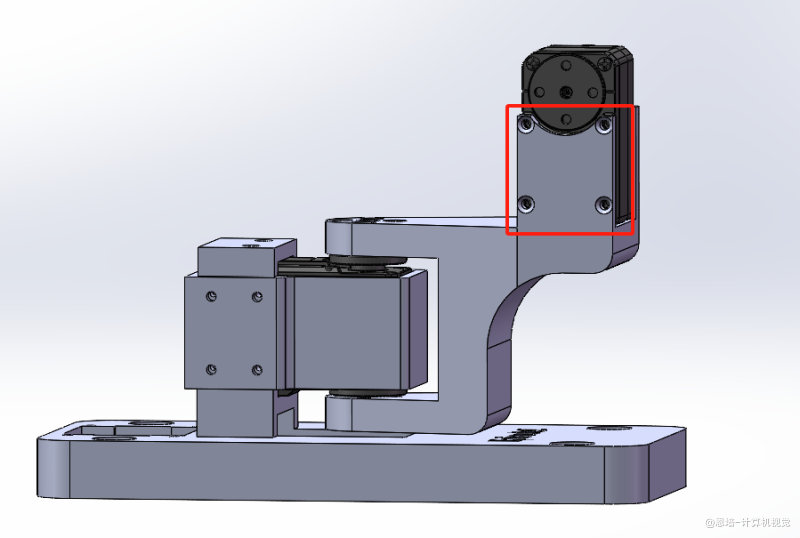
使用 5 根 M3x8 内六角螺钉,拧入这些孔 |
 |
还有下面 4 个孔 |
 |
塞入第二个舵机,注意出线孔方向 |
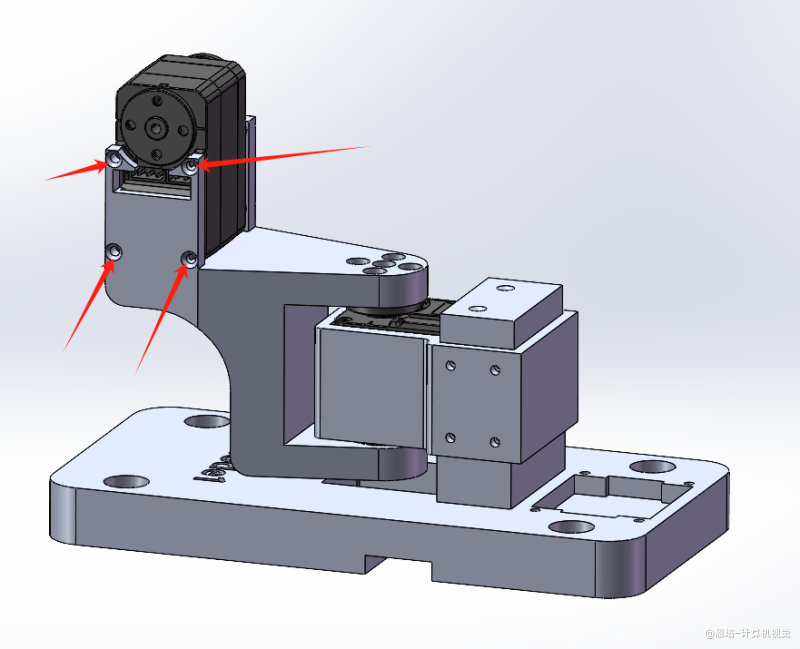 |
使用 M2 * 10 自攻螺丝,拧入这 4 个固定孔(主要不要太大力矩) |
 |
还有背面 4 个孔 |
 |
安装下一个关节,同样的,使用 M3x8 内六角螺钉固定 |
 |
类似的,后面都是这样安装。安装第 3 个舵机 |
 |
安装第 4 个舵机 |
 |
安装第 5 个舵机 |
 |
安装第 6 个舵机 |
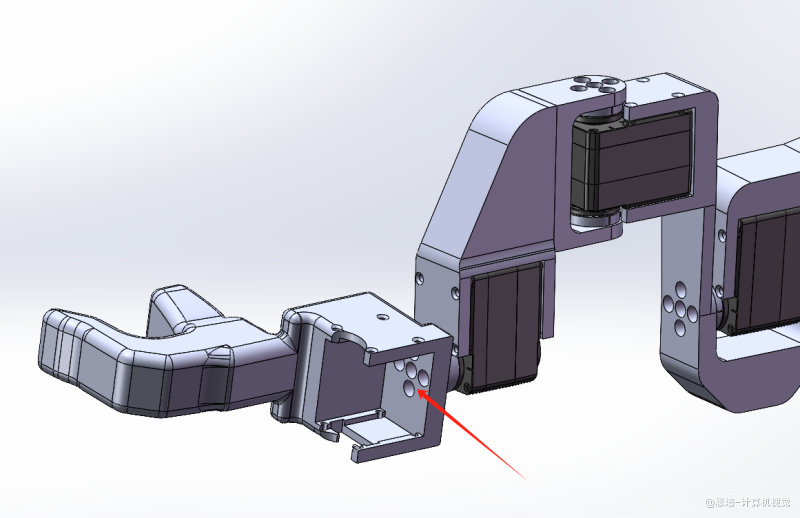 |
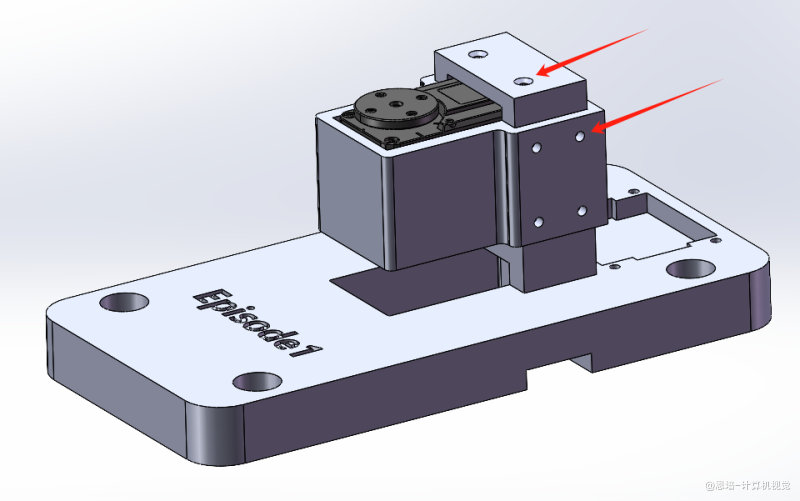
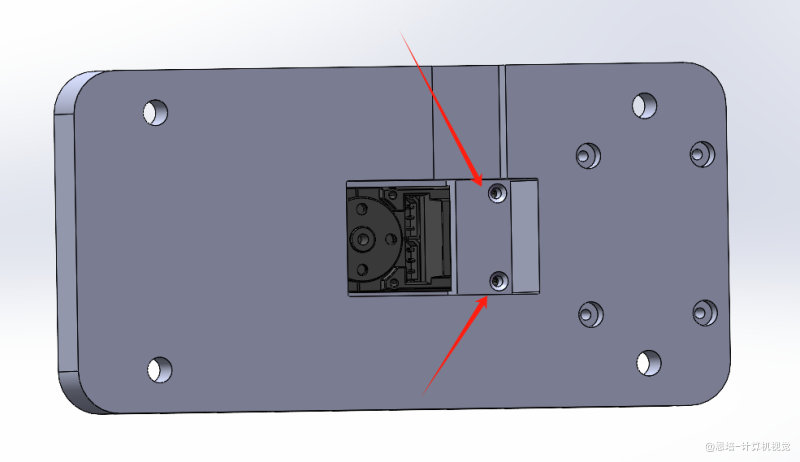
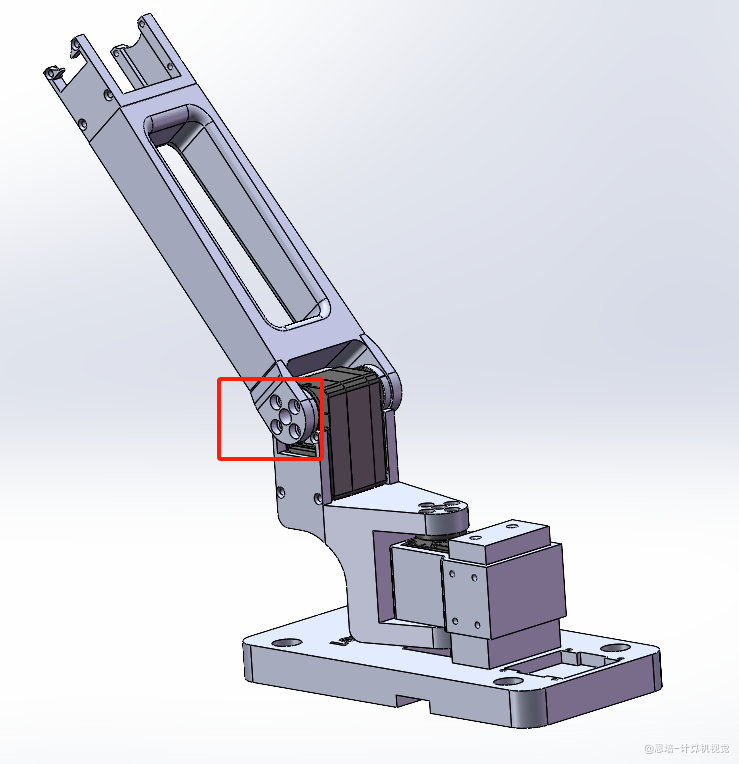
安装夹爪支座,沿着箭头的孔拧入 M3x8 固定螺丝 |
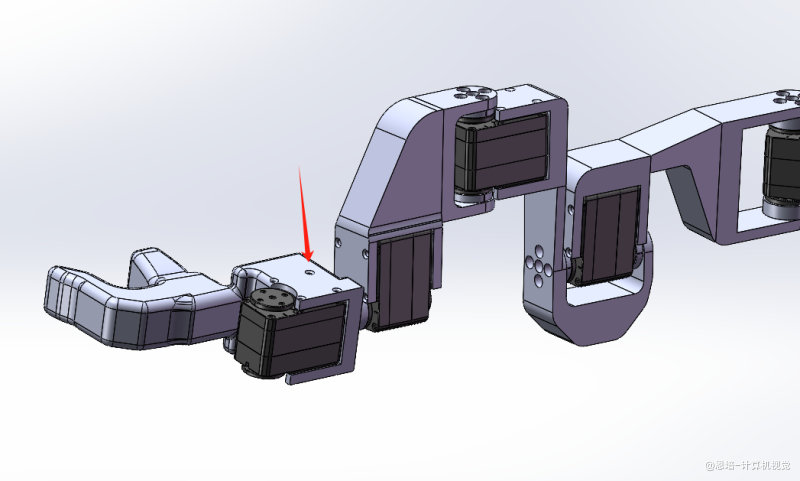 |
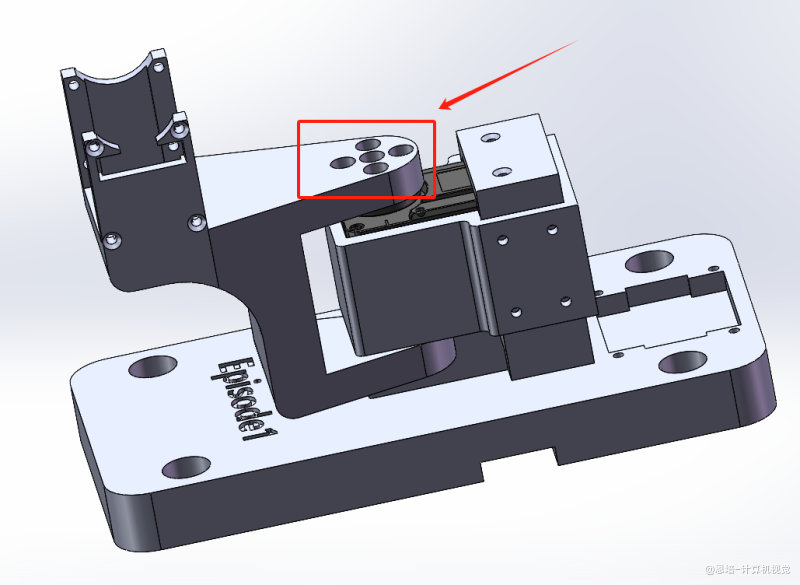
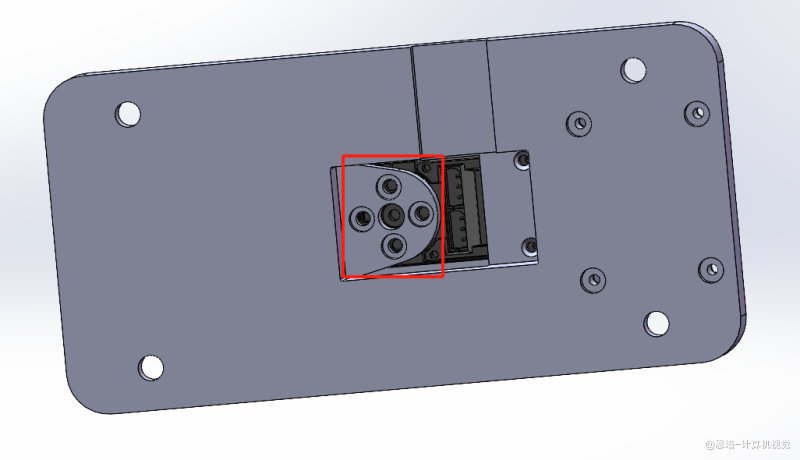
放入第 7 个舵机,并使用 M2x10 自攻螺丝固定 |
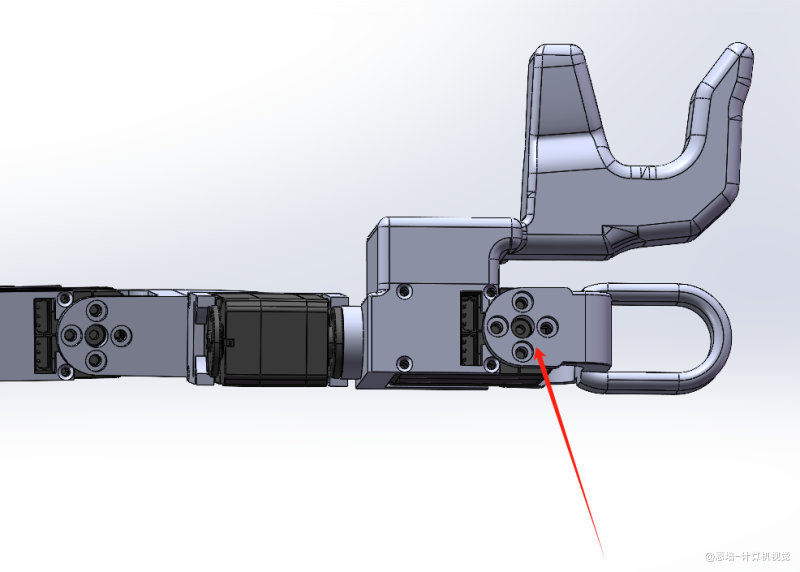 |
安装并固定夹爪手指环 |
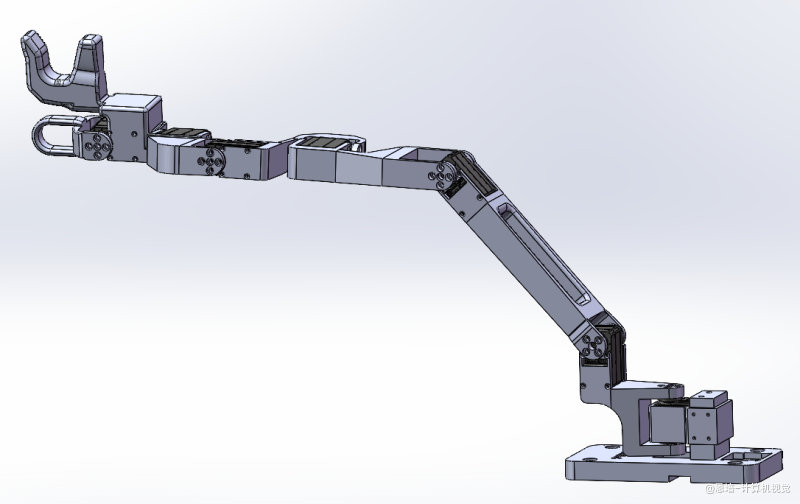 |
结构安装完成! |
2. 电机编号
| 配图 | 安装步骤 |
|---|---|
 |
拿出舵机驱动板 |
 |
拿出电源 |
 |
拿出数据线 |
 |
拿出舵机数据线 |
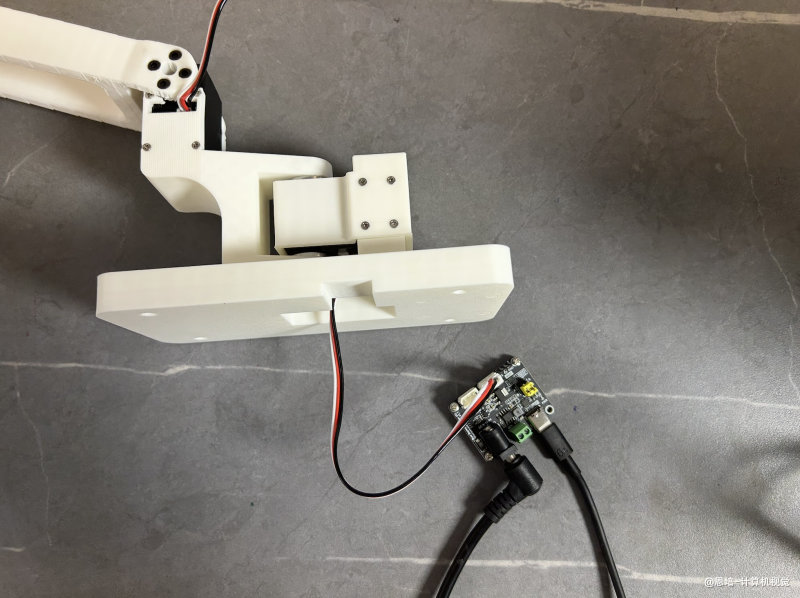 |
1. 驱动板插上电源 2. 驱动板插上数据线 3. 驱动板插上舵机数据线 4. 舵机数据线插上第一个舵机(先不要链接其他舵机,一个个操作) 5. 电源通电 6. 数据线另一头插入 Windows 电脑 USB 口 |
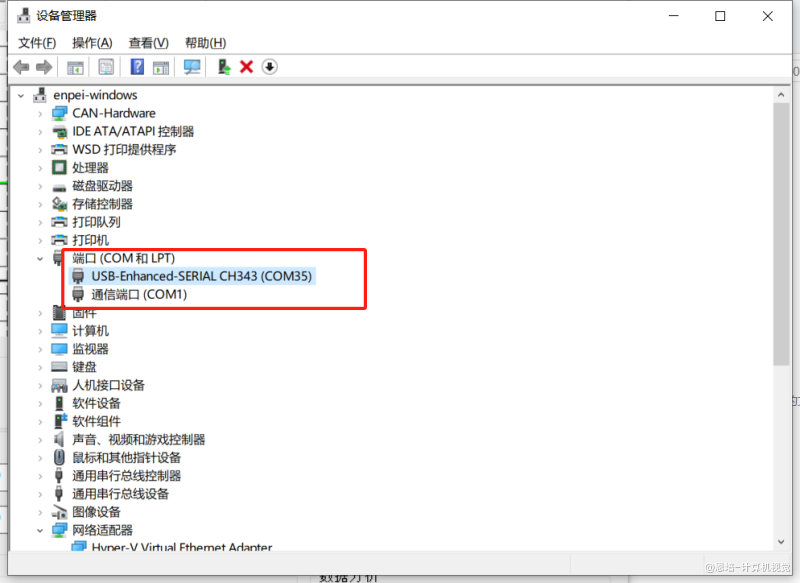 |
1. 检查设备管理器,应该可以看到新开的一个端口 2. 记住端口号,比如我的是 COM35 |
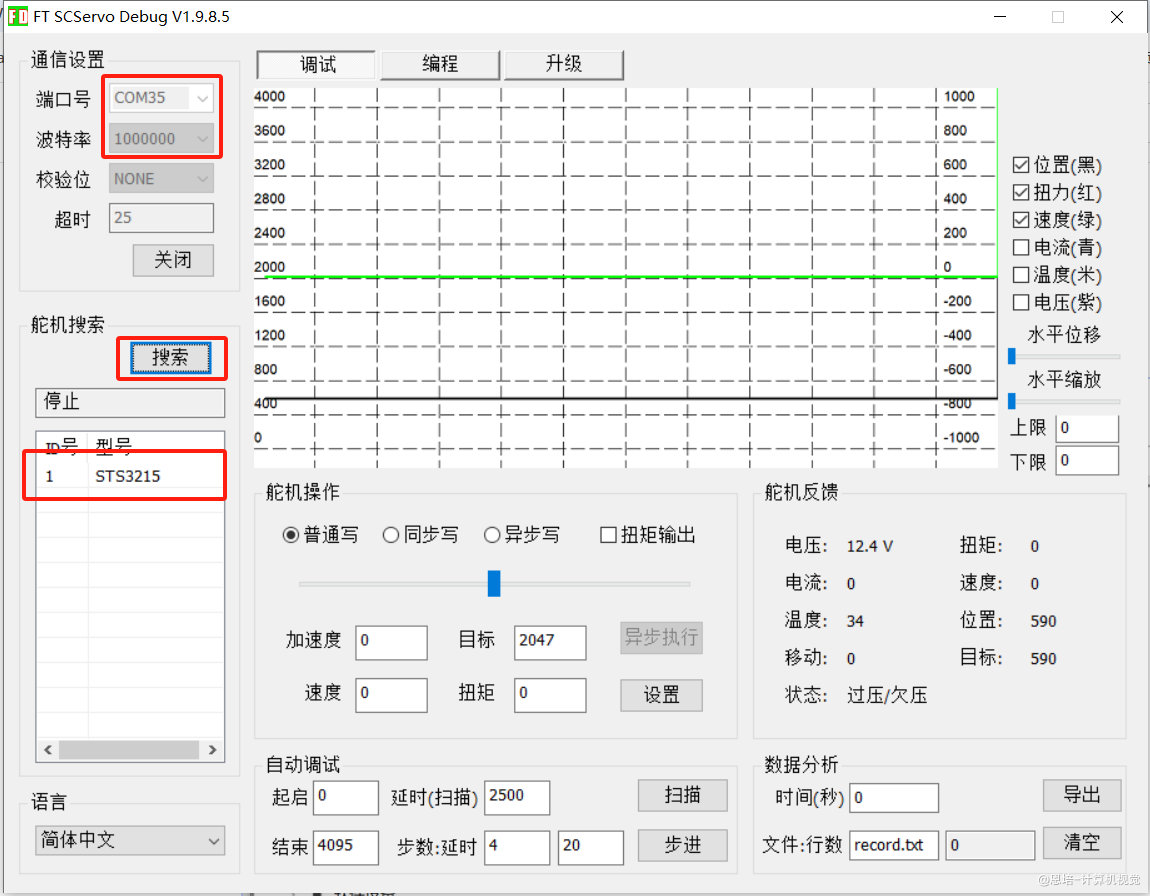 |
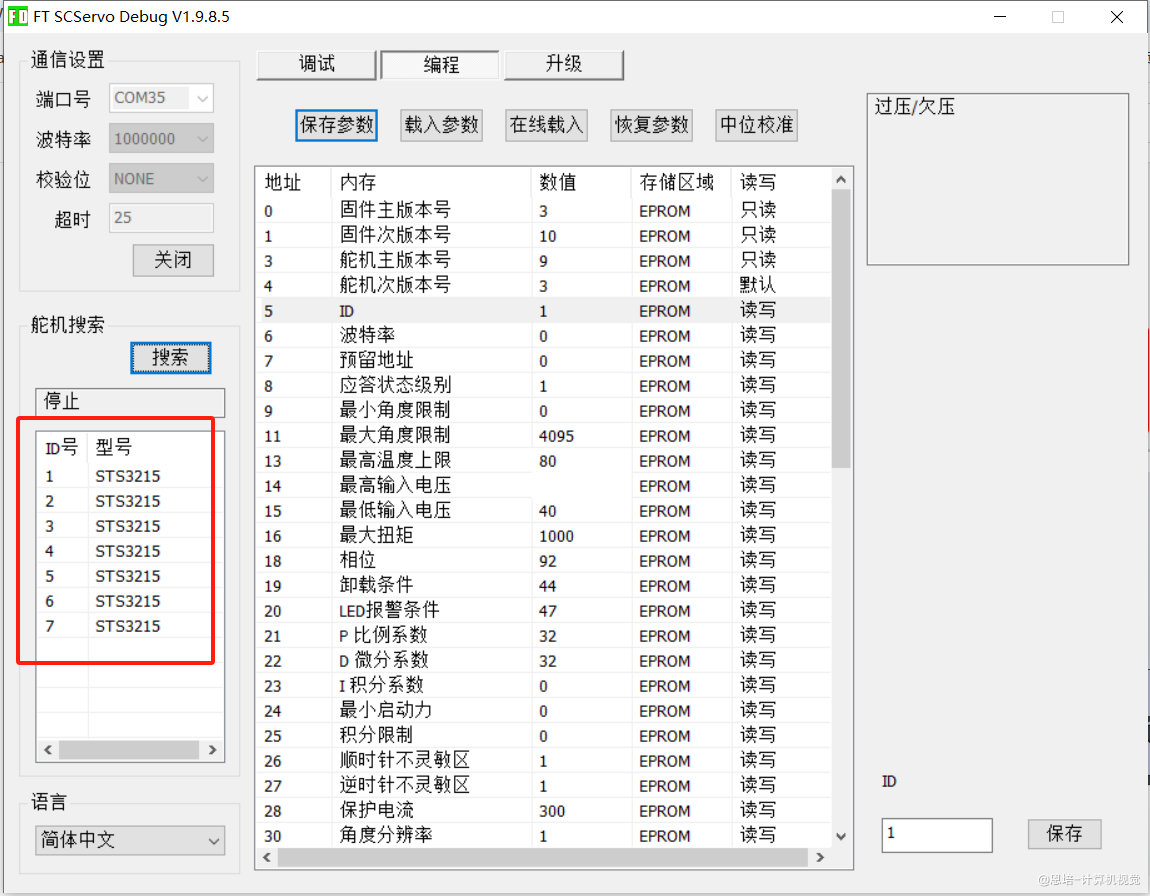
1. Windows 下载舵机上位机 2. 打开上位机 3. 选择刚才设备管理器的端口 4. 波特率选择 100,0000 5. 打开端口 6. 搜索舵机 7. 搜索到一个舵机就停止搜索(因为我们就连接了一个舵机) |
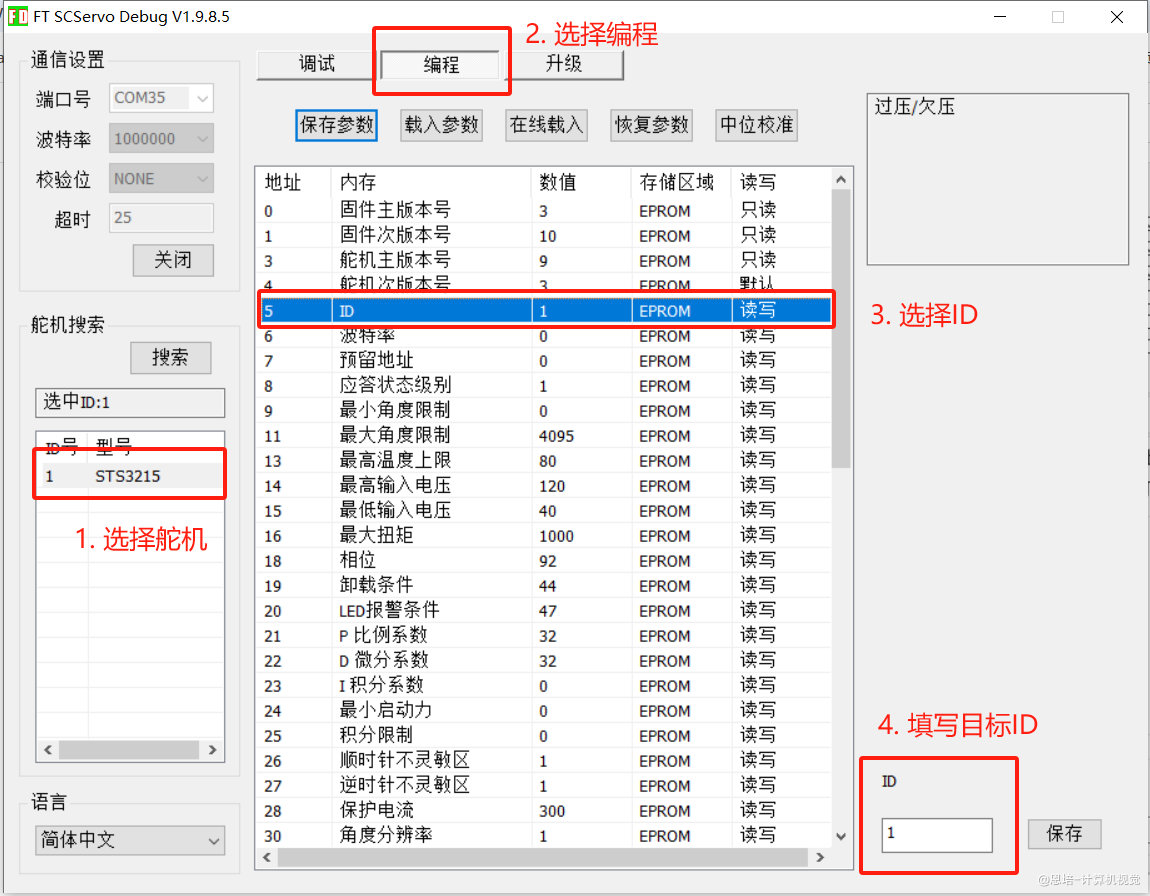 |
1. 选择对应舵机 2. 选择编程按钮 3. 选择 ID 一栏 4. 填写目标 ID 5. 第一个舵机就编号为 1 6. 保存 7. 拔掉舵机线,连接下一个舵机 |
 |
1. 将剩余舵机一个个编号,分别是 1~7 2. 每次只连接一个舵机,否则容易混淆 |
 |
使用剩余舵机线,把所有舵机串起来(每个舵机有两个连接口) |
 |
1.将第一个舵机多余的一个孔连接到驱动板 2. 再次搜索,理应看到 1~7 所有舵机编号 3. 如果有异常,重新编号对应舵机 |
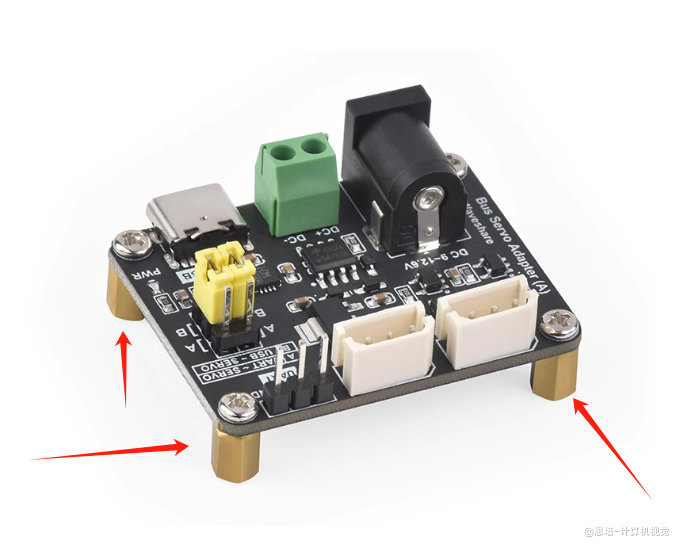 |
去除驱动板底部加高支柱 |
 |
1. 将驱动板固定在主臂底座 2. 连接舵机线 3. 遥操主臂安装完毕 |