1.8 运动控制:DH 参数与正逆运动学
本文档需要配套对应视频观看,请联系助手获取视频(微信:ffcv1024)
为保证复现效果,请在资料中心下载最新版本的 Episode1 上位机( 0.9.3 以上)、RoboDK 驱动脚本(1.1 以上)、API Demo(1.2 以上)。
1. DH 参数
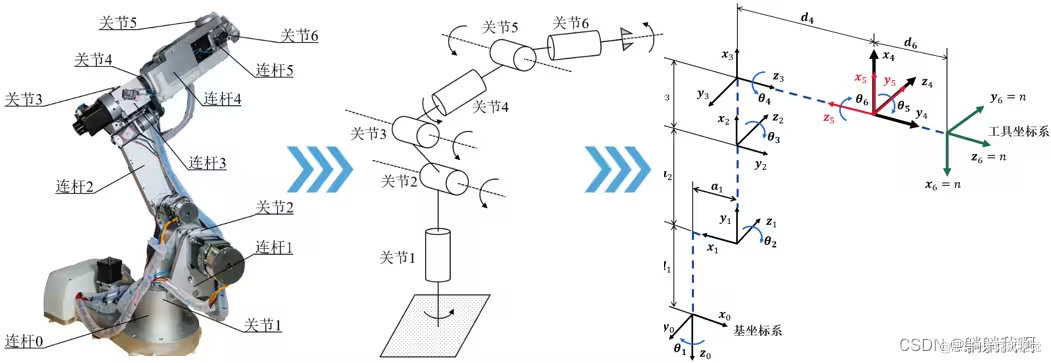
图片来自于网络,侵删。
现在我们已经熟悉姿态的概念,但上述姿态主要是描述两个坐标系之间关系,那机械臂又如何运动呢?我们还需要了解 DH 参数、正逆运动学。
| 问题 | 答案 |
|---|---|
| 在描述多个关节连杆的空间关系时,为什么单纯使用齐次变换矩阵难以直接管理各关节的相对运动? | 因为每个关节都有自己的坐标系,若仅依赖齐次变换矩阵,不同关节间的旋转轴与位置偏移很难形成统一规范。引入 Denavit-Hartenberg (DH) 参数就能以标准化方式定义相邻连杆的“旋转 + 平移”,简化整体推导。 |
| 为什么要学习正运动学?它的核心目标是什么? | 正运动学关心给定关节角度,如何计算末端执行器在基坐标系下的位置与姿态。这是最基础的功能:示教器或控制程序需要知道末端当前在哪个点、朝向如何,才能进一步做路径规划或避障。 |
| 已经知道末端在哪里,为何还需要逆运动学? | 逆运动学关心给定末端在空间中的目标位姿(坐标 + 姿态),如何求解对应的关节角度。若没有逆运动学,我们就无法指定“让末端移动到某个空间点”并求出关节动作。 |
| DH 参数和正逆运动学是什么关系? | DH 参数定义了各关节连杆之间的相对变换(齐次矩阵)。正运动学则基于这些连杆变换逐级相乘得到末端的位姿。逆运动学则逆向利用(或求解)同样的 DH 模型和矩阵来求解每个关节的角度。 |
1.1 机械臂的基本结构概念
1.1.1 关节(Joint)
在机器人或机械臂的多关节结构中,关节(Joint)是用来连接相邻连杆的机械机构,其作用是允许两段连杆之间产生相对运动。根据运动类型的不同,常见的关节可分为 旋转关节(Revolute Joint) 和 移动关节(Prismatic Joint),如下动画:
| 旋转关节 | 移动关节 |
|---|---|
 |
 |
1.1.1.1 旋转关节(Revolute Joint)
-
定义
旋转关节允许相邻连杆绕某一固定轴做角度变化,就像一根“铰链”或“轴承”一样,故又称“铰链关节”或“R 关节”(英文里常用 R 表示 Revolute)。 -
运动特性
- 关节的唯一运动自由度是“角度”,通常记作
。 - 在二维示意图中,可以直观看到一个杆臂绕关节转动;在三维空间中,该关节的旋转轴可能是水平、垂直或某个倾斜方向。
- 一般会有限位(机械或软件),保证关节旋转范围(如 -180° ~ +180°)。
- 关节的唯一运动自由度是“角度”,通常记作
-
举例
-
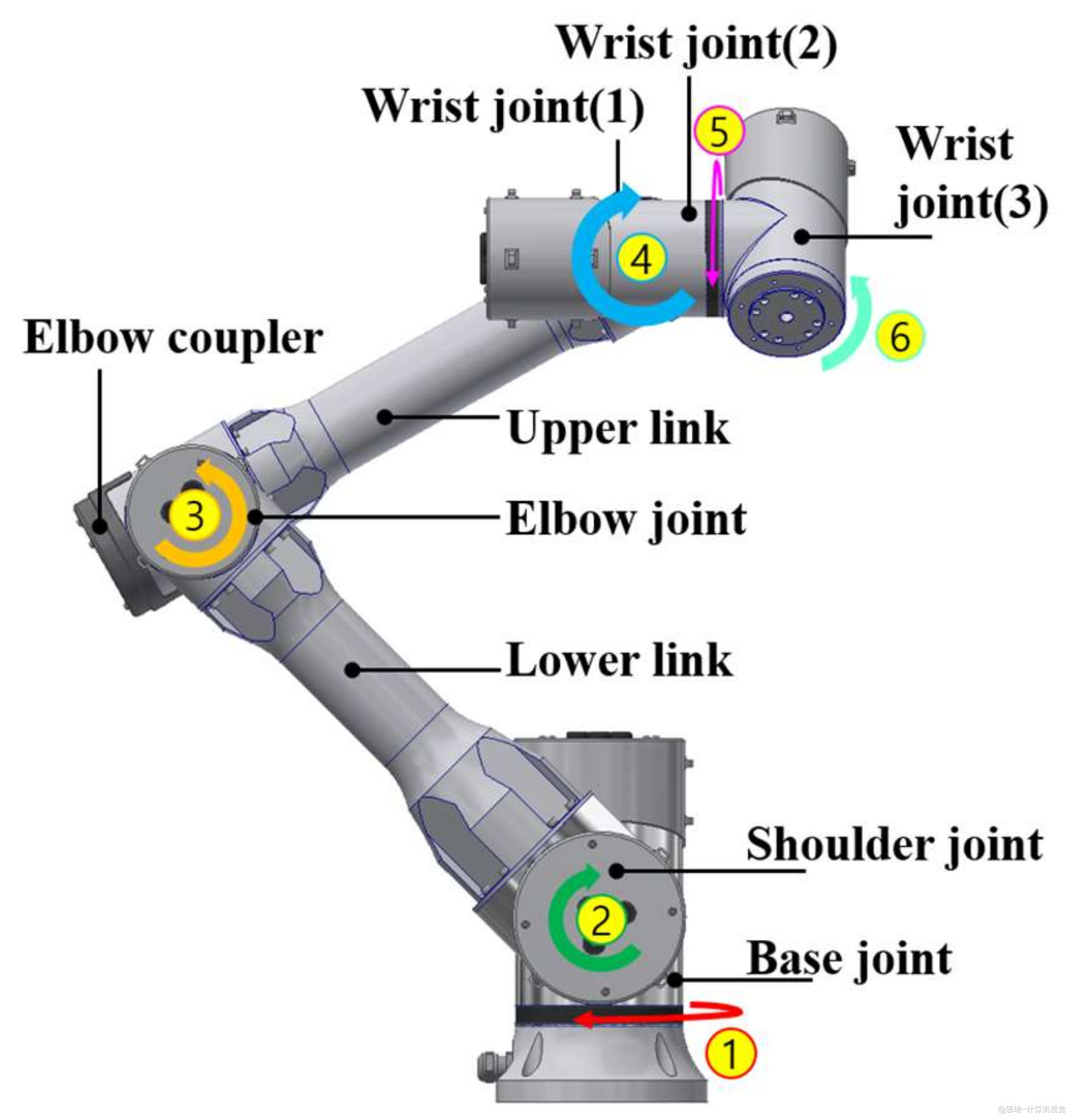
六轴机械臂中,每个关节大多是旋转关节:像人类手臂的肩、肘、腕关节一样,可以绕各自的转轴旋转。
-
机器人手指在爪子上的开合关节。
-
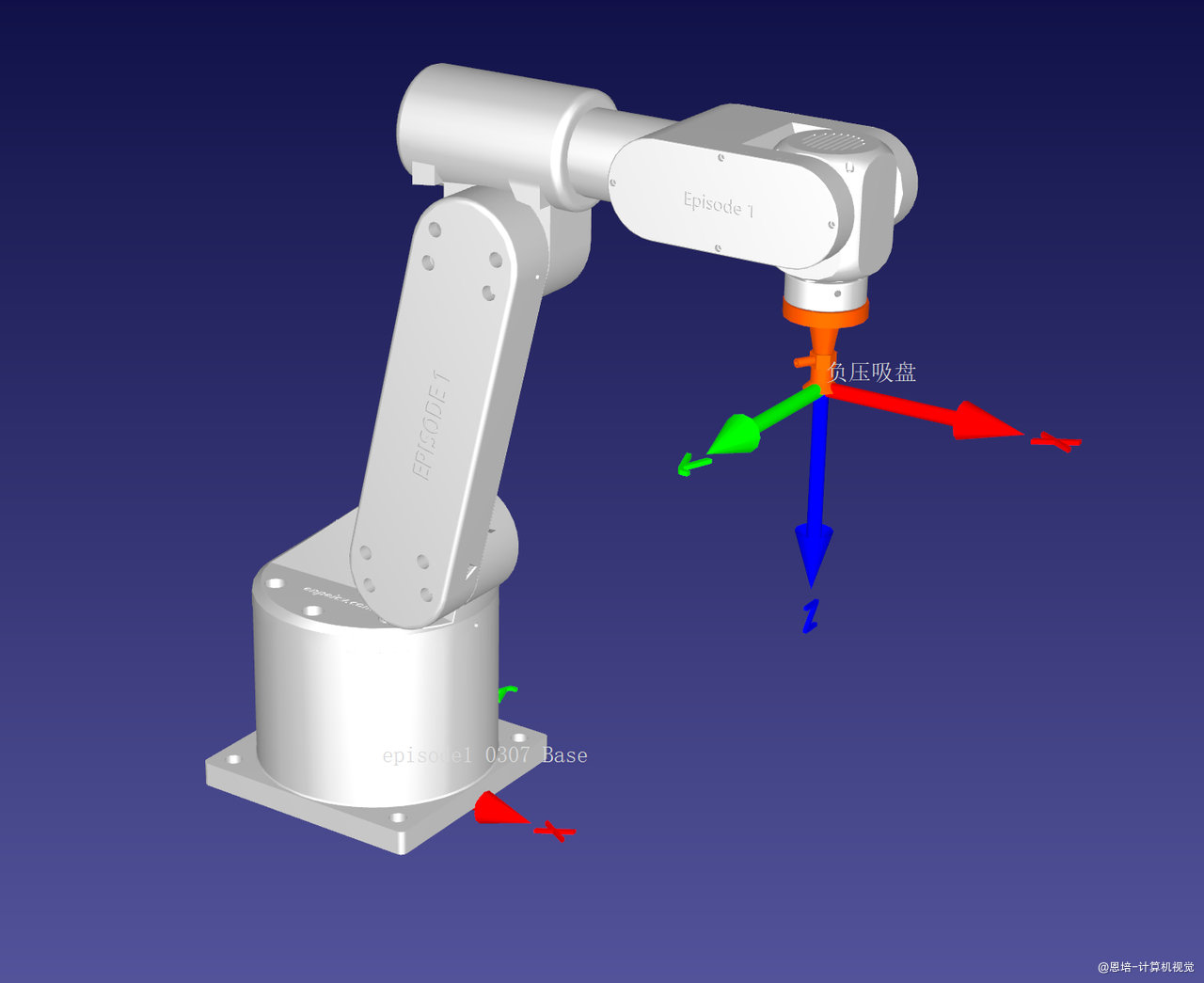
一般六轴机械臂,如 Episode1,六个关节都是旋转关节:
-
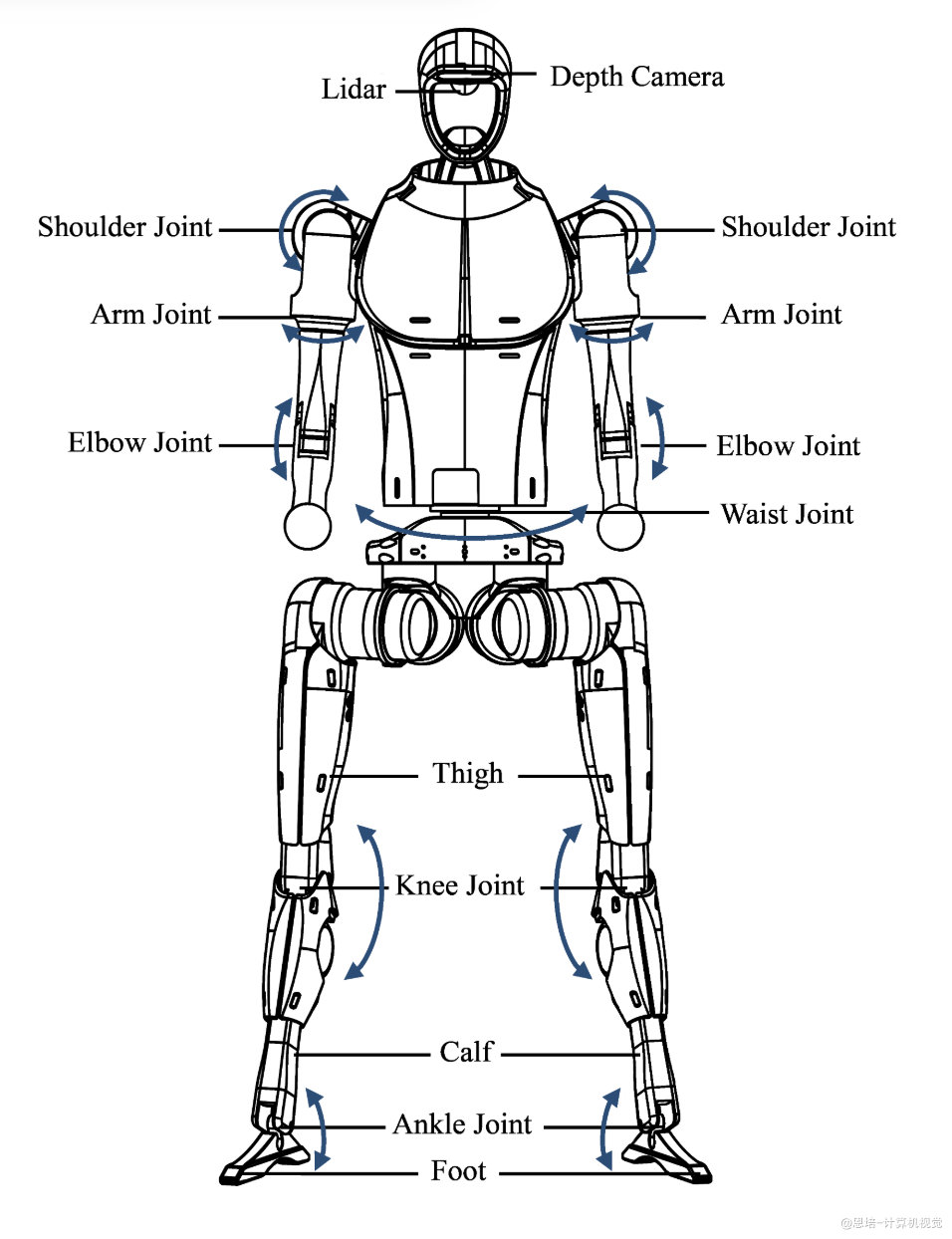
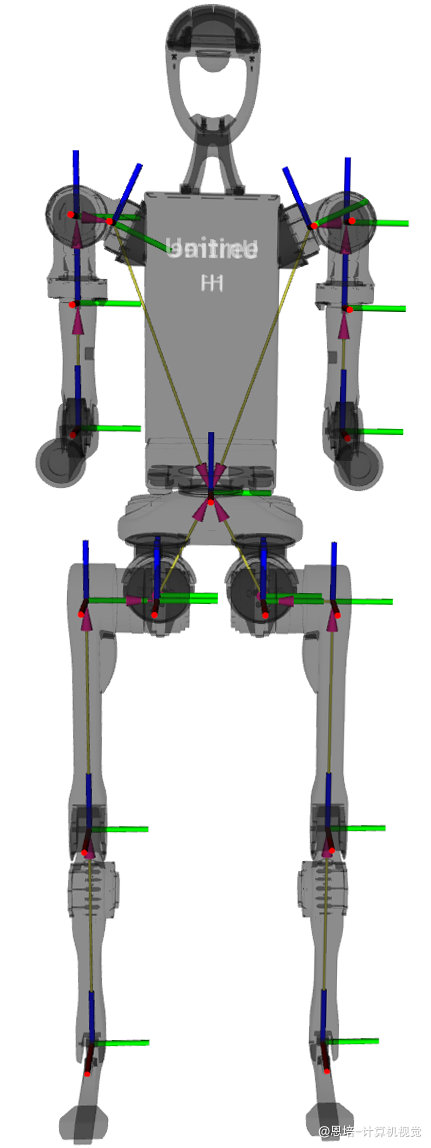
甚至对于人型机器人,也基本都是旋转关节(Unitree H1)
-
-
优点 & 应用
- 适合绝大多数需要灵活“摆动”或“定位”的任务场景,如焊接机器人、喷涂机器人等。
- 结构相对成熟,伺服电机或减速机可直接驱动关节转动。
1.1.1.2 移动关节(Prismatic Joint)
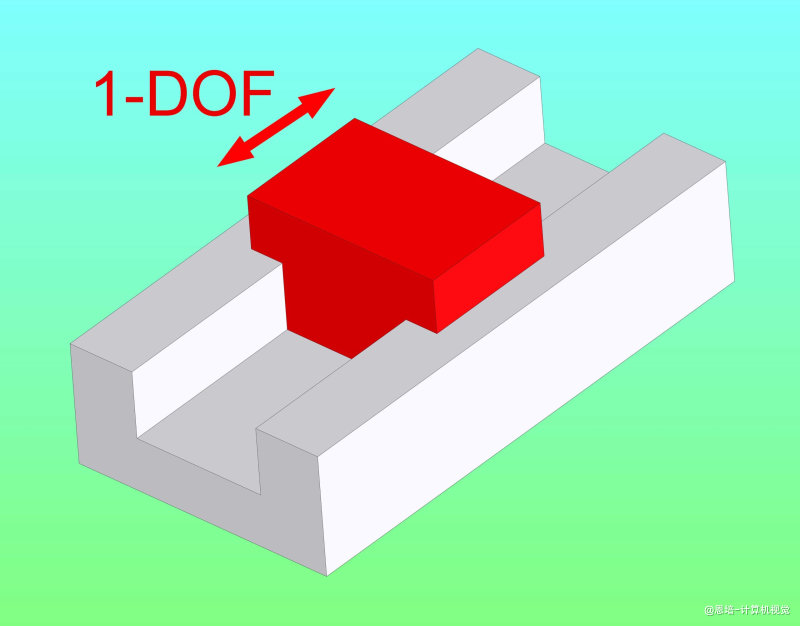
- 定义
移动关节允许相邻连杆沿某个方向做直线滑动或伸缩,因此也叫“滑动关节”或“P 关节”(英文用 P 表示 Prismatic)。 - 运动特性
- 关节的唯一运动自由度是“长度”或“直线位移
”。 - 常见结构:一个气缸、液压缸、丝杠,或线性滑轨等,使连杆能在该轴向上移动。
- 一般也会有限位,如 0~100 mm、0~200 mm 等。
- 关节的唯一运动自由度是“长度”或“直线位移
- 举例
- 直线模组:在一条直线导轨上移动的单元,被广泛用于自动化搬运、3D 打印机等。
- 具有伸缩臂的机械臂,一段能沿中心轴抽拉、改变整体长度。
- 优点 & 应用
- 对需要“平移或伸缩”动作的场合特别直观(例如需要在水平面上快移、或抓取时做线性插入、拔出)。
- 某些工业场景结合旋转关节与移动关节,可实现更大工作空间,或者简化特定方向的运动控制。
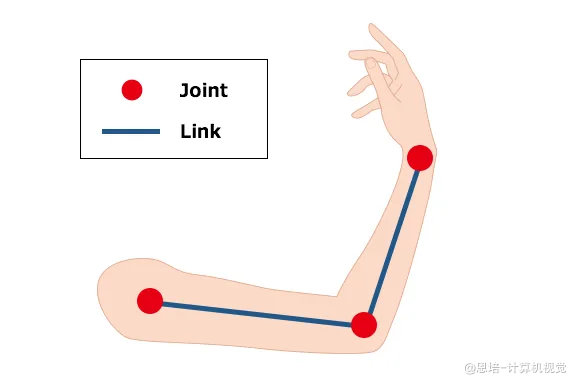
1.1.2 连杆(Link)
| 人手 | 协作机械臂 | 人型机器人 |
|---|---|---|
 |
 |
 |
连杆(Link)在机器人多关节结构中指的是 连接关节与关节之间的刚性构件,它将一个关节传递的运动或力延伸到下一个关节或末端执行器。
-
机械臂的骨架
- 在多关节机器人中,关节和连杆相互交替:关节 → 连杆 → 关节 → 连杆……形成机械臂的基本骨架。连杆不可主动运动,但通过关节的活动获得整体运动能力。
-
尺寸与形状
- 连杆具有固定的长度和几何形状,通常由金属或复合材料制成,确保在高负载、快速运动时具备足够的刚度和强度。
- 对于机器人运动学建模,常关注连杆的参考长度(在 DH 参数 中用
等符号描述)。
-
坐标系设置
-
为了分析运动学,每个连杆会在其起始关节或末端关节处定义一个坐标系,并根据不同坐标系间的相对位置与姿态,用齐次变换矩阵或 DH 参数进行描述。
-
-
动力学与负载(扩展概念)
-
虽然连杆本身只是传递力和运动的构件,但在动力学分析中,需要知道连杆的质量、转动惯量等,以计算运动过程中的力矩、加速度或能耗。
-
在一般的入门学习中,我们多关注连杆长度、位置关系等几何属性。
-
1.2 DH 参数的由来与目的
有朋友会问:“我只想知道末端在哪里、要怎么到那里。能不能别让我量一大堆麻烦的数据?为什么非要学 DH?”
目标:把整条机械臂拆成“关节‑关节”小段:
- 核心任务:描述每个关节相对前一个关节的 位姿。
- 把这些“小段”对应的齐次矩阵连乘 ⇒ 得到整机 正运动学,为轨迹规划、逆运动学打基础。
我们已有武器:齐次变换矩阵
它一次性打包 旋转
思路转变:量“几何量”替代“量矩阵”
- 对相邻关节,总能找到四个易测、可重复的几何量
:两 轴公共垂线长度(沿 ) :两 轴绕 的夹角 :当前关节沿自身 的平移量 :当前关节绕自身 的旋转角
- 这四个量 ⇢ 可直接生成齐次矩阵,形成 Denavit–Hartenberg (DH) 参数法。
DH 的核心操作
- 放坐标系(遵循 DH 规则)
对准关节轴 - 公共垂线方向设为
- 读取四个参数
- 其它杆件形状、厚度、孔位一律忽略——对位姿链无影响。
为何偏选 DH
- 简洁:4 个量 → 1 个
矩阵 - 复用:换机器人只需重测这 4 个量
- 通用:教材、工业软件、科研论文广泛采用;“改进 DH 法”依旧同一套路
结论:学 DH 的目的,是用最少、最可靠的几何量,快速搭建整条“位姿骨架”。正 / 逆运动学、动力学分析都建立在这条骨架之上。
1.3 定义 DH 参数(经典/标准法)
关于 DH 参数的说明:
网络上关于 DH 参数的教程众多,定义方式也不尽相同,常见差异主要在于:
- 所采用的 坐标系放置规则不同(即经典 DH 与改进 DH 混用)
- 关节编号与坐标系编号不统一,导致理解混乱
由于目前并没有一个被所有人完全统一接受的“权威标准”,本课程采用林沛群老师的 DH 定义方式。
若你在其他资料中看到不同版本的 DH 表达,请不必困惑或争论。只要我们合理放置坐标系,按照统一规则使用四个参数
正确构建出齐次变换矩阵,都是可以的。
请把重点放在 建立清晰一致的坐标系、理解四个几何量的意义与作用,细节取舍不必过于纠结。
下面介绍的主要是旋转关节的 DH 参数。
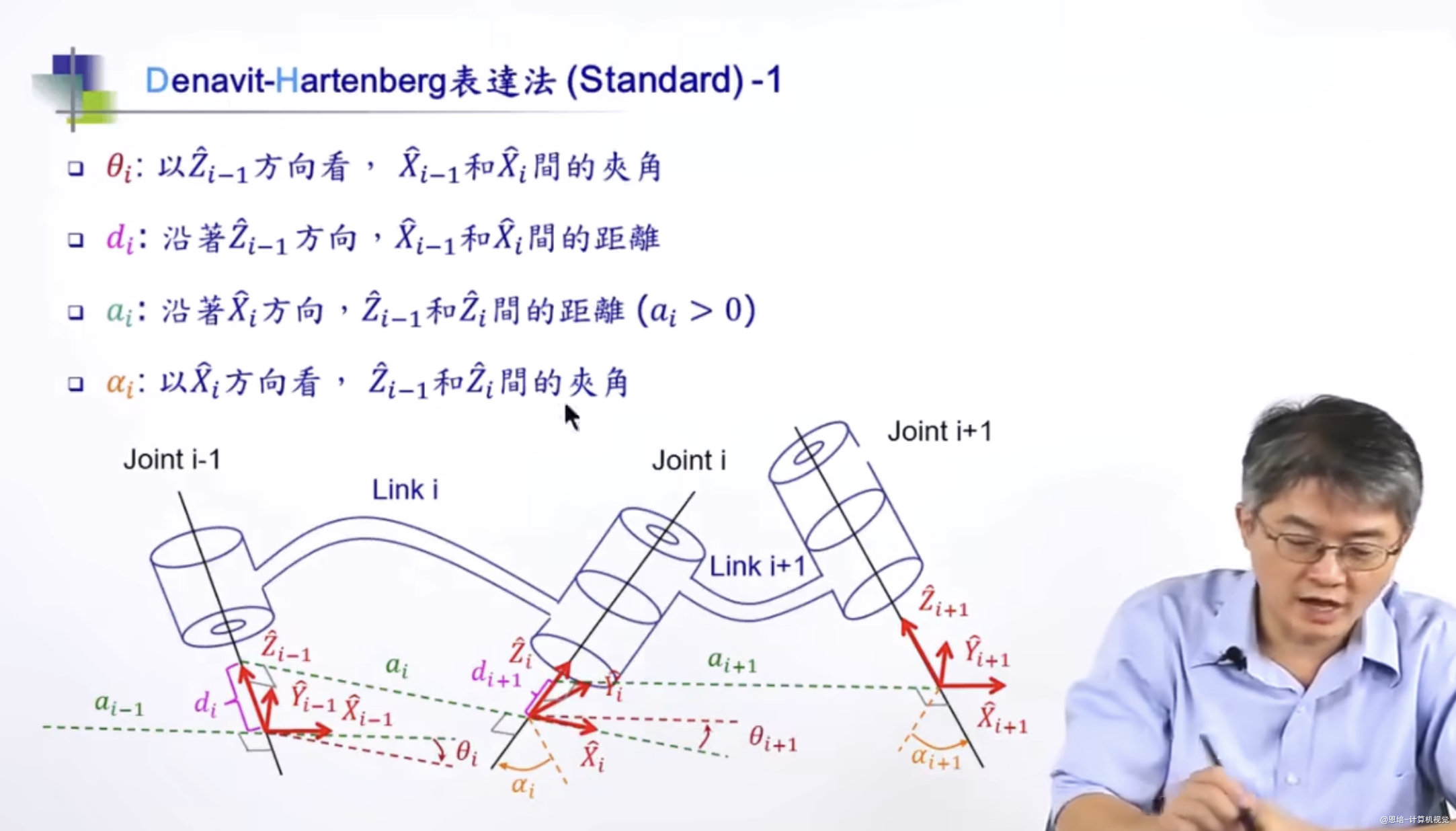
1.3.1 放置连杆坐标系()
图片来自林老师课程。
| 步骤 | 操作 | 目的与要点 |
|---|---|---|
| ① 设 |
与第 |
保证关节变量仅影响 |
| ② 找公共垂线 | 在 |
若两 |
| ③ 得 |
右手系: |
保证 |
下面用一些动画加深理解:
图片来源于网络
| 动画 | 解释 |
|---|---|
 |
|
 |
对于 Base 坐标系, 对于后续的关节, |
 |
|
 |
加入另一个关节, |
1.3.2 四个 DH 参数
| 参数 | 测量方向 | 几何含义 |
|---|---|---|
| 连杆长度 |
沿 |
沿 |
| 扭转角 |
绕 |
绕 |
| 关节偏移 |
沿 |
沿 |
| 关节角 |
绕 |
绕 |
- 对旋转关节:
为变量, 为常量 - 对移动关节:
为变量, 为常量(可置 )
| 动画 | 解释 |
|---|---|
 |
DH 的四个参数从两个关节 |
 |
注意:如图,第二个关节坐标系原点是可以在关节外部的(DH 建模考虑的是连杆 Link,而不是真实的物理分布) |
 |
关节偏移 |
 |
关节角 |
 |
连杆长度 |
 |
扭转角 |
助记点:
-
轴好确定,根据旋转或移动方向即可,那再只要确定 轴即可方便得到 DH 参数, 轴如何确定? -
在为相邻关节放置坐标系时,有两种做法:
- 让 上一节坐标系的
轴沿公共垂线(common normal); - 让 下一节坐标系的
轴沿公共垂线。
方案 谁占公共垂线? 对分叉链影响 A (上一节) 祖先坐标系的 只能指向一个后继,若一关节分出多支链,就不能同时对齐多条公共垂线。 B (下一节) 每个子链的 都沿自己与祖先轴的公共垂线,祖先坐标系无需改变,即可挂多个分支。 我们一般选择第 2 种,这样对“分叉链”更高效,因为同一个祖先关节可以向多个子链各自指出一条公共垂线;而若采用第 1 种方案,祖先的
轴只能指向其中 1 个子链。 - 让 上一节坐标系的
-
末端法兰连杆 Frame{n}
- 为了简化,通常取
取 同方向 - 旋转关节:即关节偏移
,关节角 为任意值(通常选择 0) - 偏移关节:即关节角度
,关节偏移 为任意值(通常选择 0)
- 旋转关节:即关节偏移
- 为了简化,通常取
1.3.3 例子
这里举一些常见机械臂例子
表中图示坐标系颜色说明(红蓝标反了):
- 红色:Z
- 蓝色:X
- 绿:Y
R:Revolute(旋转关节)
P:Prismatic(滑动关节)
上述自由度组合是常见结构,部分类型在特定实现中可能会有所不同。
| 名称 | 自由度组合 | 应用方向 | 图示 | DH 表 |
|---|---|---|---|---|
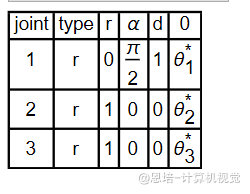
| Planar Elbow(平面肘型) | R–R 或 R–R–R | 教学、二维轨迹仿真 | 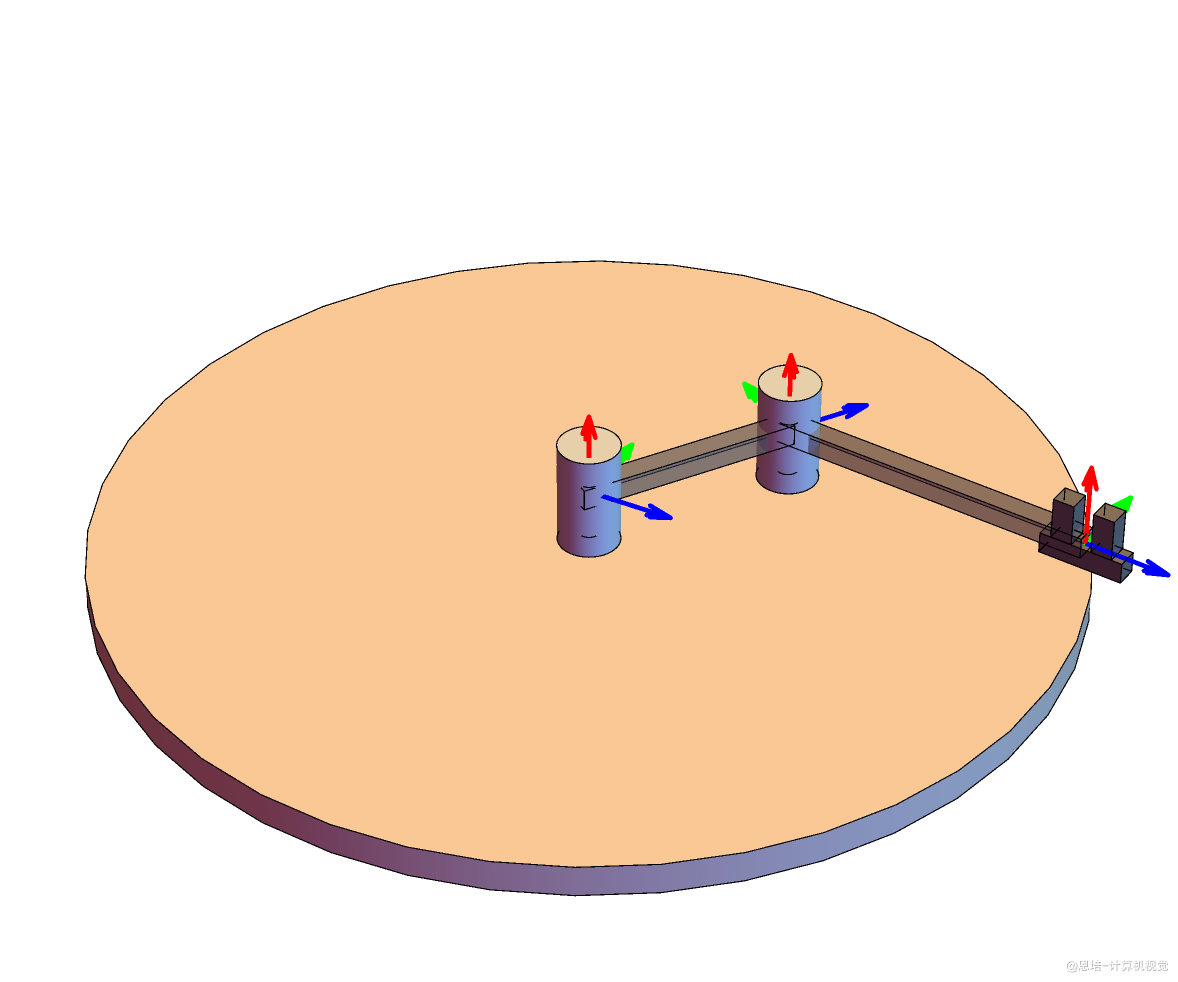 |
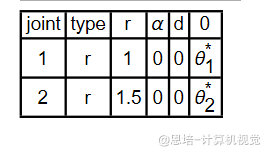 |
| Elbow Robot(肘型机械臂) | R–R–R(3D) | 工业搬运、焊接 | 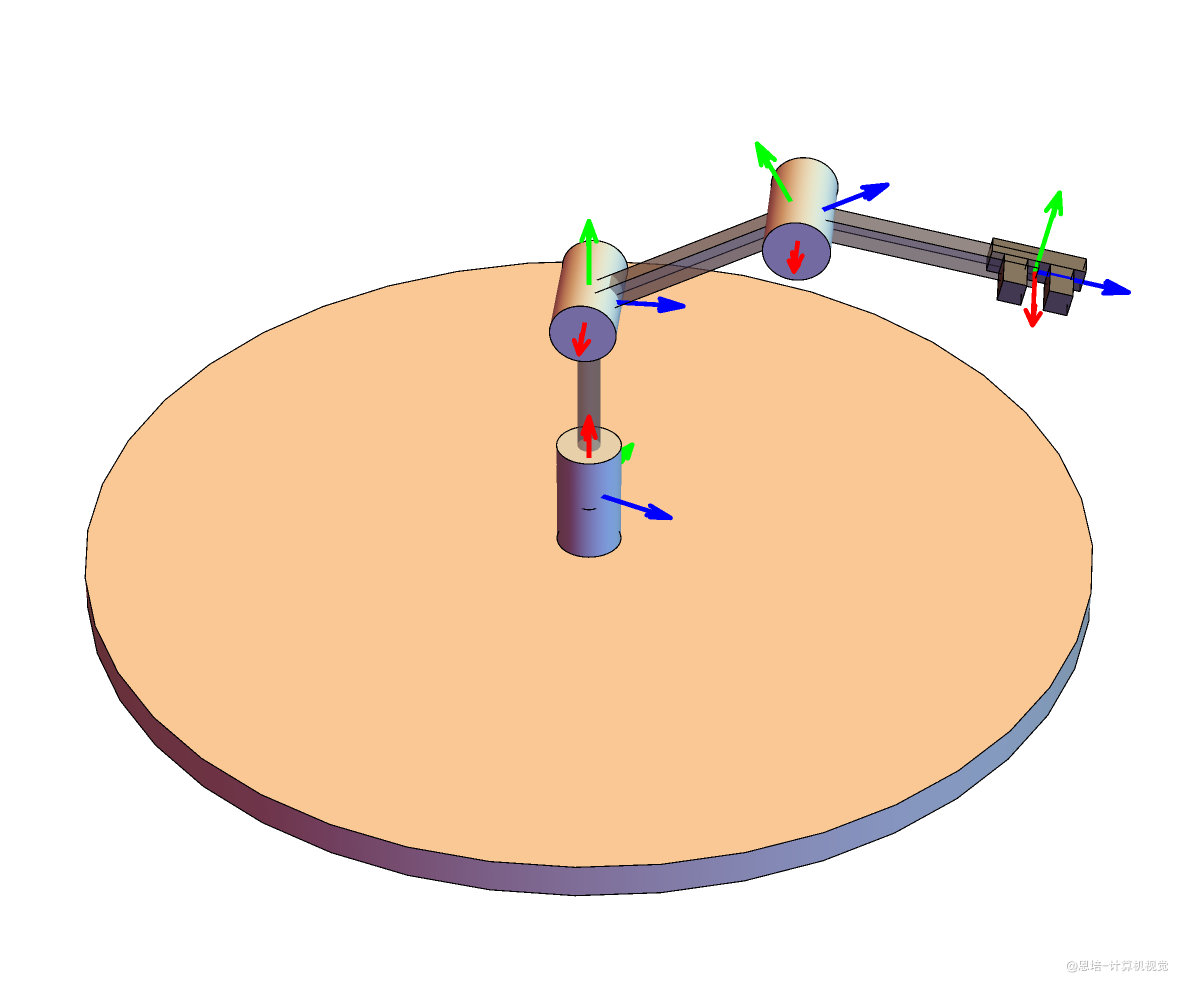 |
 |
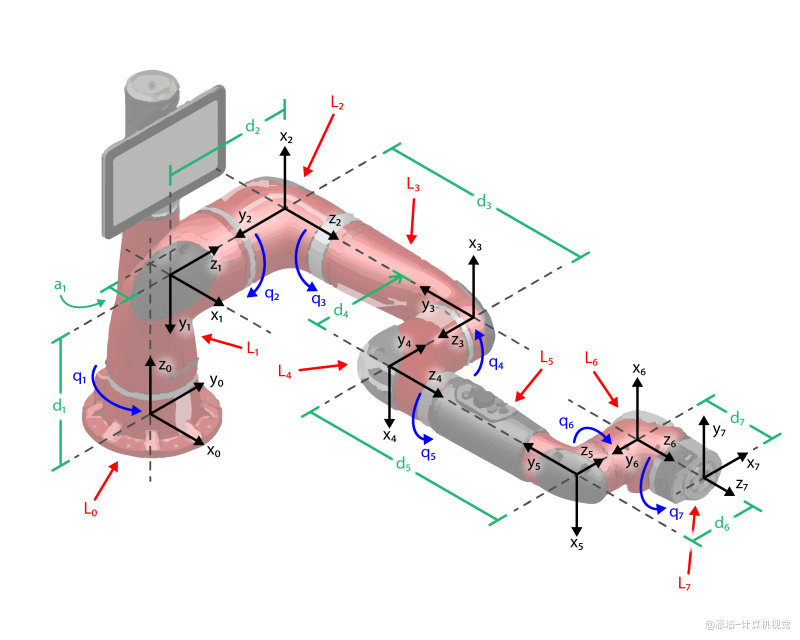
| Anthropomorphic(类人型) | R–R–R–R–R–R | 服务、人机协作 | 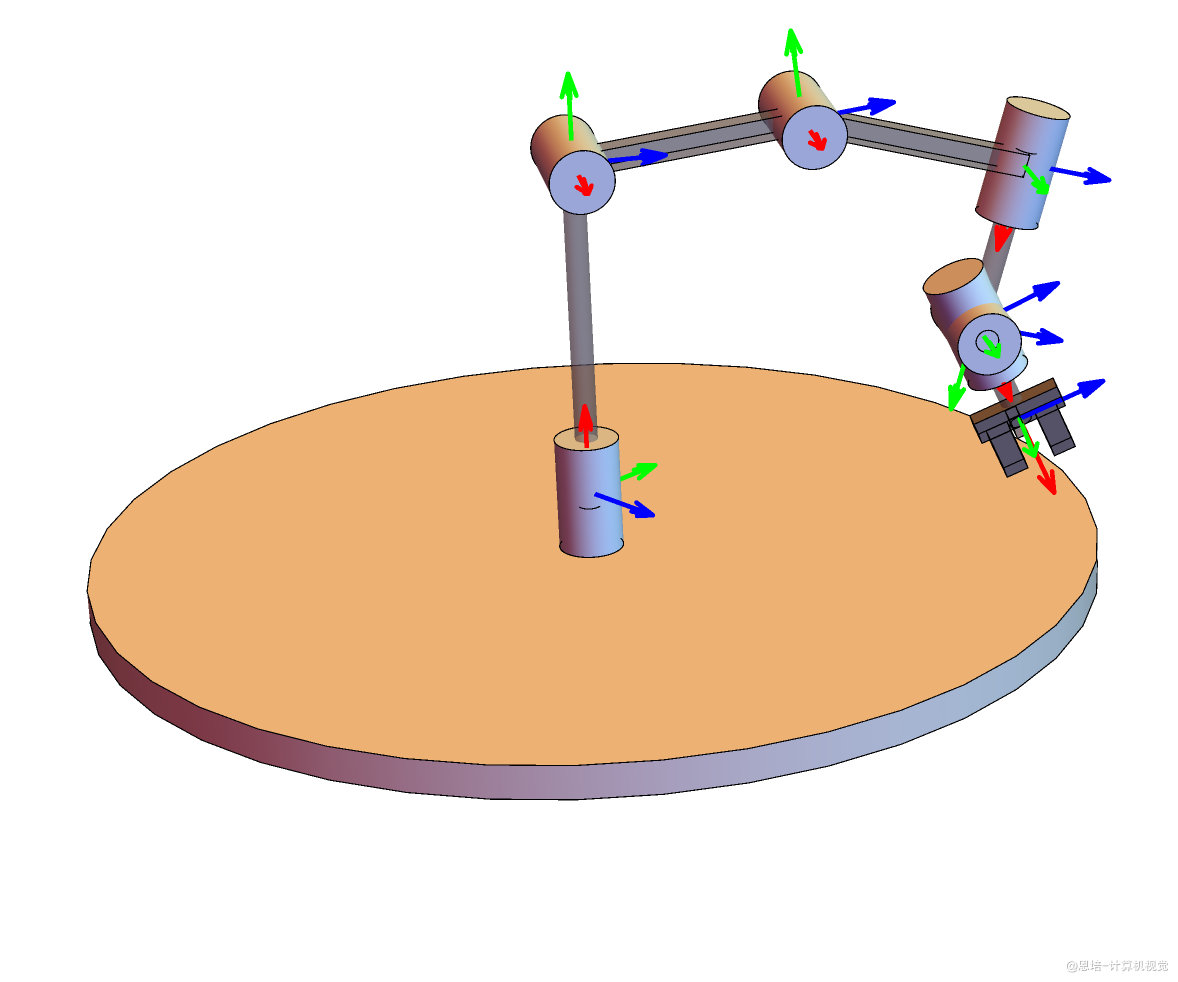 |
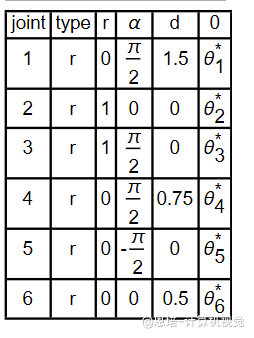 |
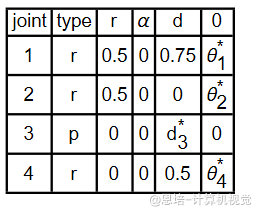
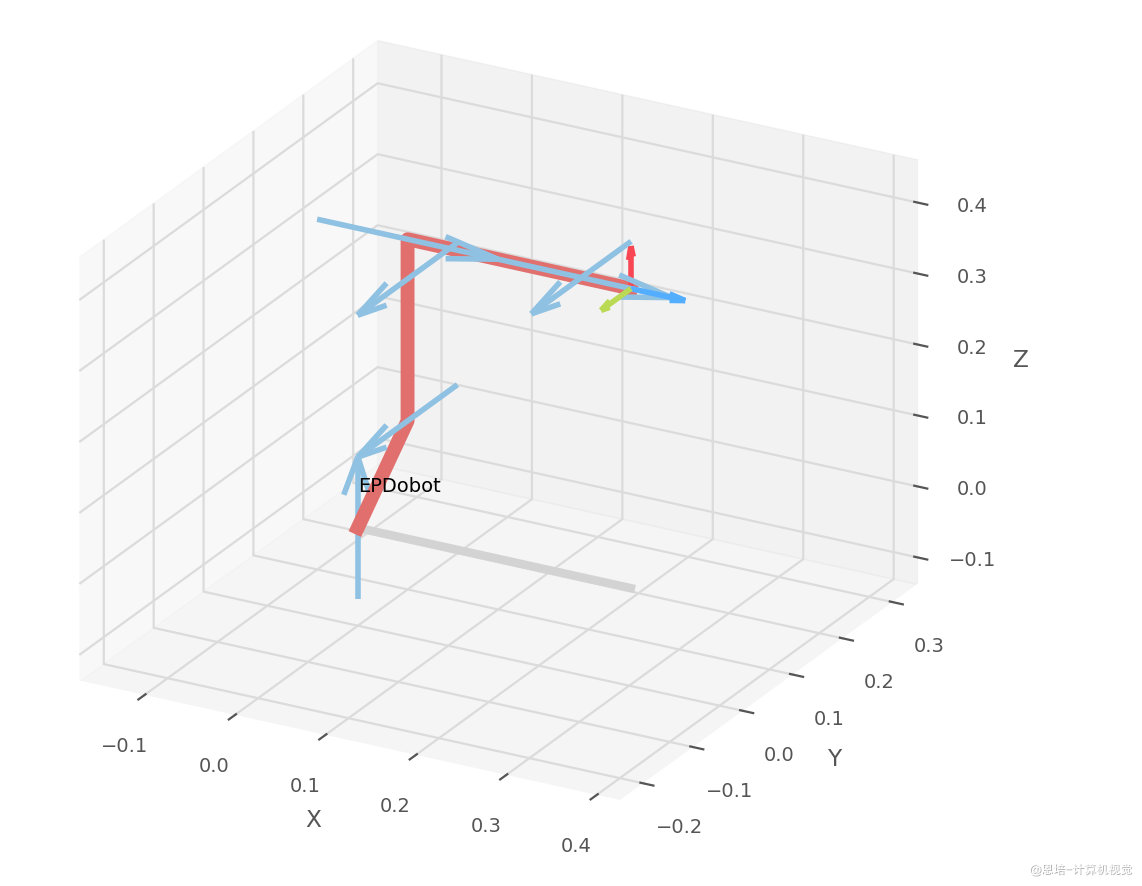
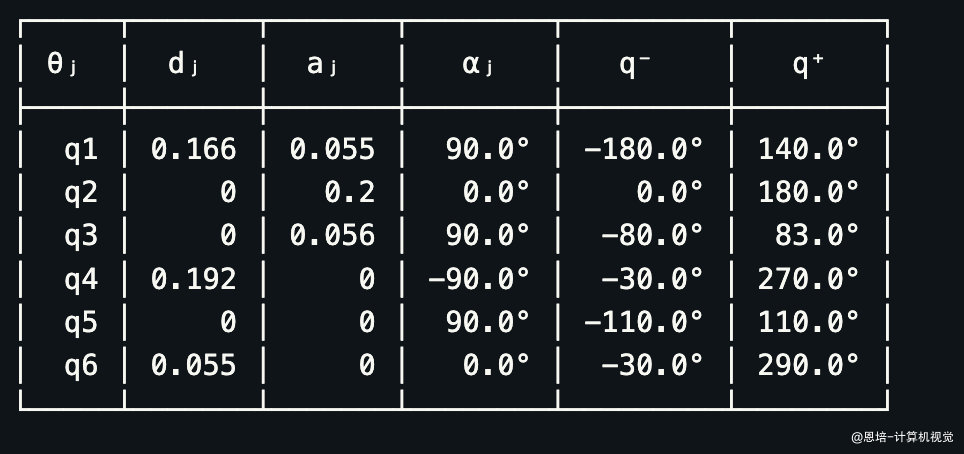
| Episode 1 | R–R–R–R–R–R | 教学 | 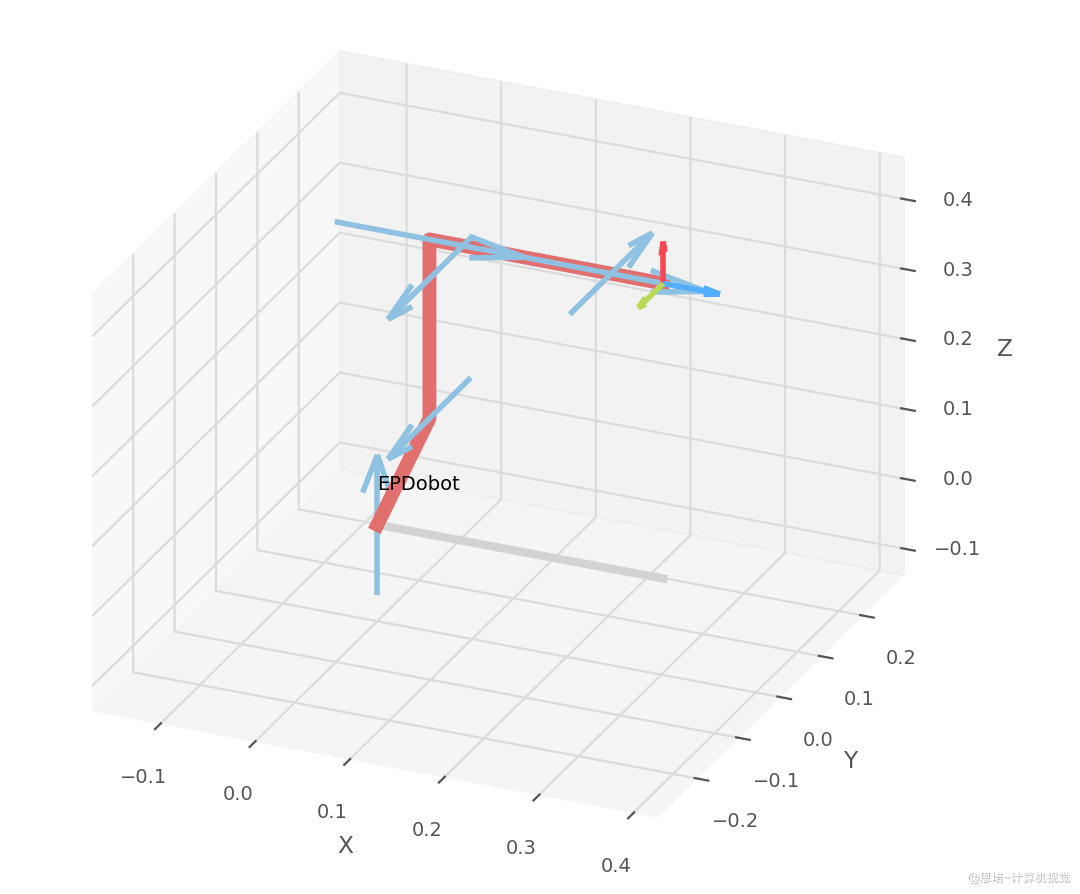 |
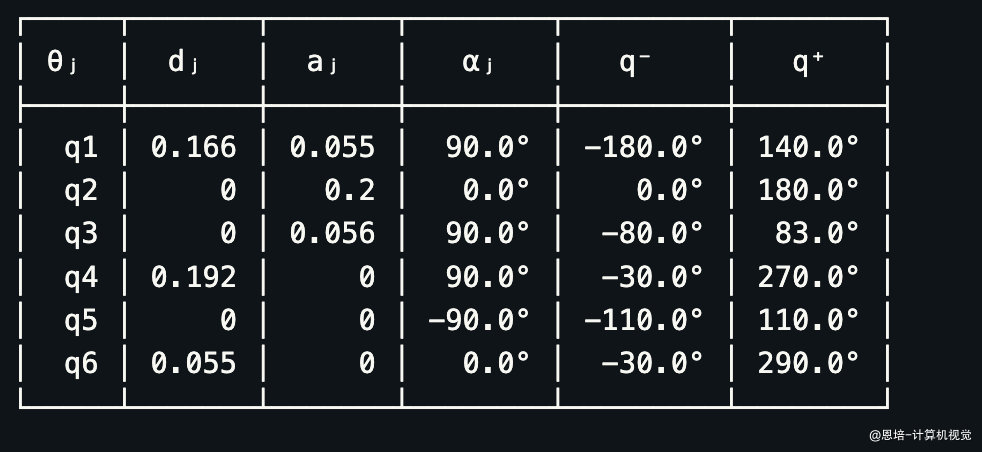 |
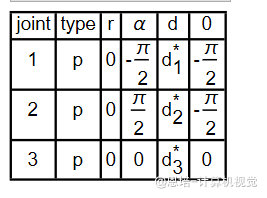
| SCARA(顺应装配臂) | R–R–P | 平面装配、电子制造 | 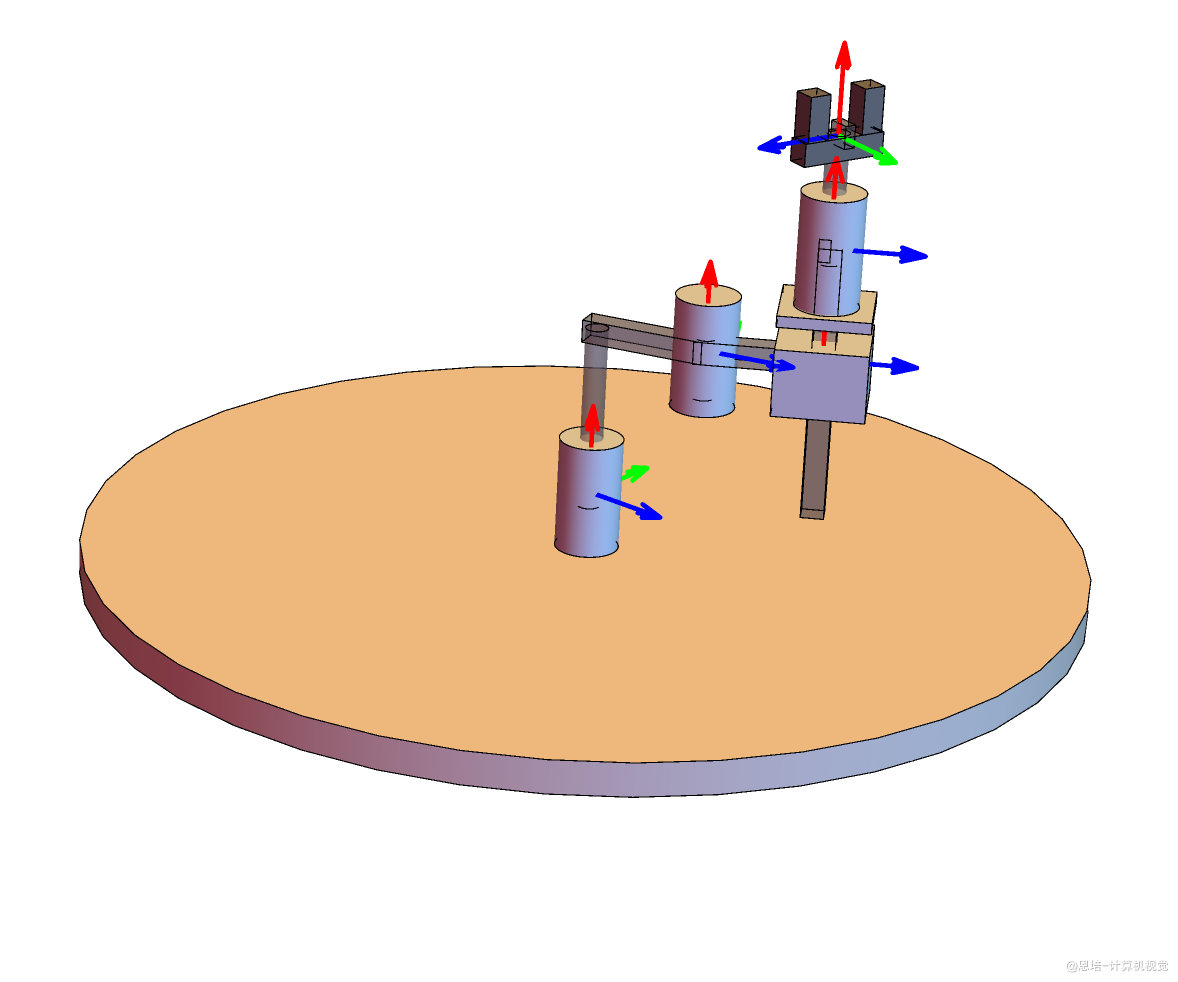 |
 |
| CNC Robot(数控机器人) | 结构不固定(常为 P-P-P) | 精密切削、自动加工 | 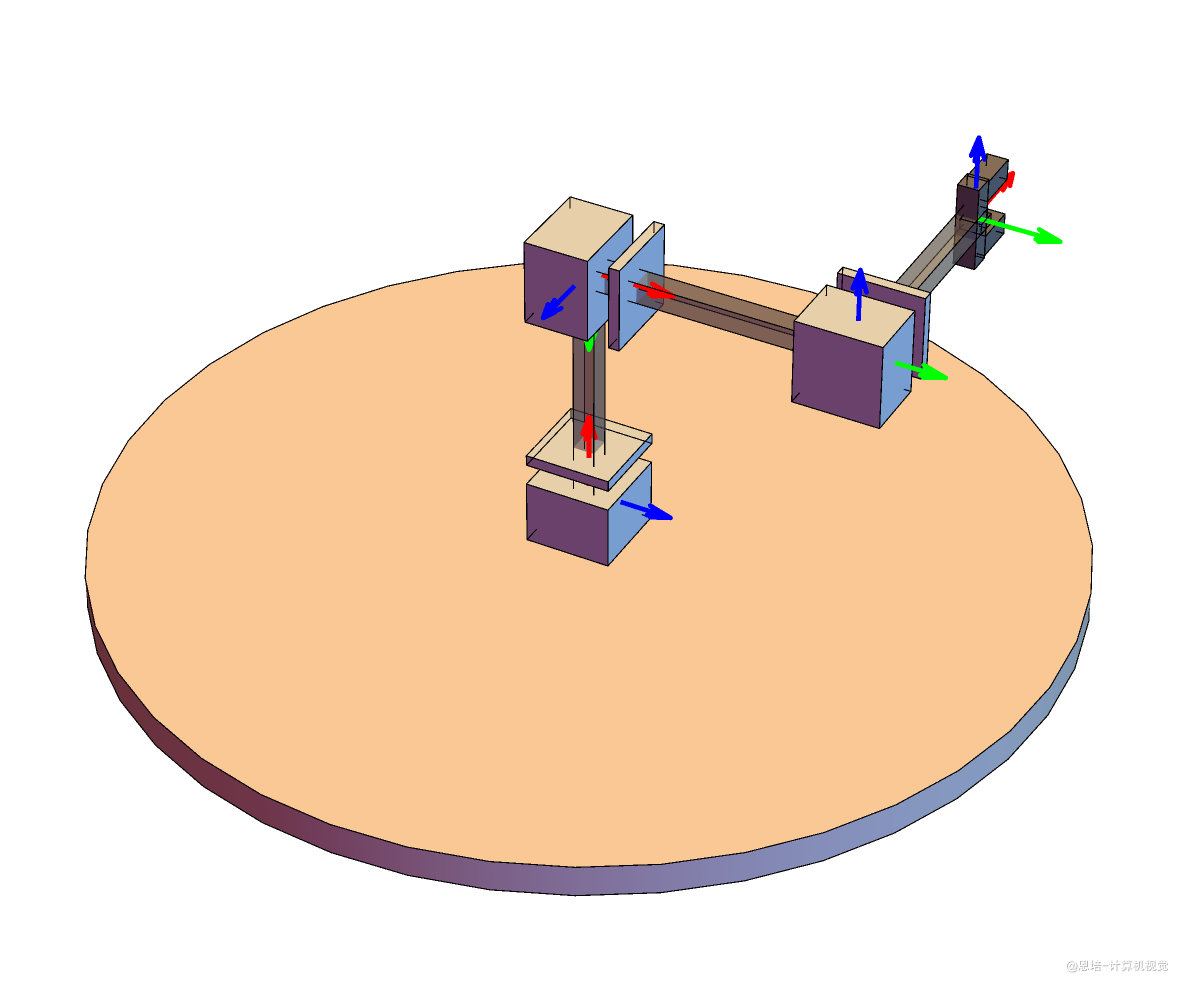 |
 |
你可能观察到:
-
Anthropomorphic 和 Episode 1 的
存在负数,那它的正负如何定义?
- 因为
:绕 轴, 到 的扭转角,取值 ,逆时针为正 - 则
:绕 轴, 到 的扭转角方向为顺时针,所以为负
- 因为
-
的方向是沿着关节轴 ,也就是有两个方向的选择,根据惯例, 方向选择倾向于: - 对 旋转关节:
的方向应使得 时是 右手法则方向的旋转,即四指指向旋转方向 - 对 移动关节:
的方向应与 的平移方向一致。
不过就算你选的方向不按这个原则也没事,只要你的坐标系定义是“自洽”的(剩余几个参数也跟着调整),齐次变换结果就会正确, 但一旦 Z 轴方向变了而其余参数未作相应修改,齐次变换矩阵就会出错。如 Episode 1 的例子:
- 如
朝外: 的扭转角 分别为 - 如
朝内: 的扭转角 分别为
- 对 旋转关节:
 |
|
 |
|
可以看到,这个会影响最终的 DH 参数表,但并不影响你建模计算,只要第四个关节的正角度旋转方向定义也对应的变化了,只要你代码对应变化即可。
课程中我使用的是
2. 正逆运动学
| 问题 | 正运动学 (FK) | 逆运动学 (IK) |
|---|---|---|
| 要解决什么? | 关节角 → 末端位姿 | 末端目标位姿 → 关节角 |
| 典型场景 | 示教、仿真、雅可比计算 | 抓取、焊接、规划、避障 |
| 为什么重要 | ① 确定当前姿态 ② 可视化轨迹 | ① 让末端到目标 ② 生成平滑轨迹 |
本文只讨论 全旋转关节 (nR) 机械臂,例如 6R 工业机器人。
2.1 正运动学 —— “给角度,算末端”
这里用的是标准 DH。
-
建立 DH 表:
对纯旋转关节:为常量, 为变量。 -
单节变换矩阵
的推导 标准 DH 把 {i‑1} → {i} 的相对位姿拆成四个 可直接写出 的基本变换(利用我们学过的欧拉角和齐次变换):
| 顺序 | 基本操作 | 矩阵符号 | |
|---|---|---|---|
| ① | 绕 |
||
| ② | 沿 |
||
| ③ | 沿 |
||
| ④ | 绕 |
记号:
同理
。
再连乘四步
逐行乘积(略去中间乘法步骤)得到
这就是 标准 DH 单节变换矩阵,后续连乘全部
- 连乘得到总变换
- 若有工具偏置
其中
- 提取结果
- 位置向量
→ 总矩阵第 1–3 行第 4 列 - 姿态矩阵
→ 左上
- 代码示例
下载代码正运动学示例,并与 robodk 仿真结果对比
- 工作空间
机器人末端执行器(TCP)在关节限位内 能够到达的所有空间点 的集合。
若还考虑姿态,则称 可达位姿空间 (Task Space)。
2.2 逆运动学 —— “给目标,算角度”
2.2.1 常用 IK 求解方法
| 方法 | 适用特点 | 核心要点 |
|---|---|---|
| 几何 / 解析解 | 轴线排布规则性强(如 6R 球腕) | 拆腕点 → 代数 / 三角方程,结果封闭形式,速度快 |
| 代数(符号)解 | 复杂三维链,轴不共面时也可 | 用 Gröbner、Resultant 消元,代码生成如 IKFast |
| 数值迭代 | 冗余 or 解析困难 | 误差函数 + Jacobian 伪逆 / LM → Newton 迭代 |
| 优化 / 约束解 | 同时满足多任务 | 以任务误差为成本,约束关节限位、碰撞,QP / SQP |
| 学习‑基 / 数据驱动 | 非结构化机械臂、大量采样 | 神经网络、GPR 把 IK 当回归;需离线训练 |
实际工程:能用解析就用解析(最快、无发散)→ 解析不可得再退到数值 / 优化。
2.2.2 通用解析解计算步骤(6R 机械臂为例)
可参考论文,大致步骤如下:
-
准备
- DH 参数 / 机器人几何
- 目标位姿
-
分离位置与姿态
- 若为球形腕,先求腕中心
- 若为球形腕,先求腕中心
-
求前 3 轴
- 解析
- 得到基座 → 关节 3 的旋转
- 解析
-
求后 3 轴
-
由
可得
-
从
解析
-
-
组合与筛选
- 关节限位、奇异、碰撞
- 多解时按代价函数择优
2.2.3 常见逆运动学求解器 IK Solvers
因逆运动学求解复杂,异常情况多,实际求解的时候,我们大多是调库,这里列出常见的求解库:
| 名称 | 解法类型 | 是否开源 | 语言/平台 | 多解支持 | 支持冗余臂 | 是否带约束 | 特点 / 备注 |
|---|---|---|---|---|---|---|---|
| IKFast | 解析解(Closed-form) | 是 | C++ / 可绑定 Python | 是(完整枚举) | 否 | 否 | 超快(毫秒级),支持打包成 Python 库,工业用最多 |
| MoveIt! IK Plugins | 数值 / 插件式 | 是 | ROS / C++ | 取决于插件 | 是 | 可配置 | 插件可用 IKFast、KDL、TRAC-IK 等 |
| TRAC-IK | 数值 + 优化 | 是 | C++ / ROS | 否(单解,初值相关) | 是 | 是 | 替代 KDL,更快更稳 |
| KDL (Kinematics and Dynamics Library) | 数值牛顿迭代 | 是 | C++ / Python(PyKDL) | 否 | 是 | 弱 | ROS 默认求解器之一,稳定但慢 |
| Pinocchio | 数值优化(几何 + 代数) | 是 | C++ / Python | 否 | 是 | 是 | 快速,适合优化和控制 |
| Robotics Toolbox for Python (RTB) | 数值法(LM, QP, GN, NR) | 是 | Python | 否(可手动多初值) | 是 | QP 支持 | 教学/研究利器,灵活但默认单解 |
| Modern Robotics Library | 解析 + 数值 | 是 | Python / MATLAB / C++ | 部分支持 | 否 | 弱 | Kevin Lynch 教材配套,支持 IK_NR 等方法 |
| Drake | 数值优化 + 符号解混合 | 是 | C++ / Python | 依赖配置 | 是 | 强约束 | 高级建模与控制系统,MIT 出品 |
| OpenRAVE (非维护) | 支持 IKFast | 是 | C++ / Python | 是(IKFast) | 否 | 弱 | 主要为 IKFast 提供环境 |
| RoboDK | IKFast 封装(+ 数值补充) | 否(商业) | GUI + Python API | 是(内置多解) | 取决于插件 | 有限支持 | 商用软件,适合工业与路径仿真,可导出 Python 脚本 |
| Unity Articulation IK | 数值 +Heuristic | 否(商业/游戏引擎) | Unity / C# | 否 | 是 | 弱 | 用于游戏/VR 仿真 |
| PyBullet IK Solver | 数值(Jacobian-based) | 是 | Python | 否 | 是 | 轻约束 | 实时仿真用,精度不高,适合强化学习 |
| V-REP / CoppeliaSim IK | 数值 + 分支解 | 是(基础版) | Lua / Python / GUI | 可部分配置 | 是 | GUI 设置 | 图形环境好,教学仿真首选 |
| ROS2 Kinematics Plugins | 数值 / 插件式 | 是 | C++ / ROS2 | 同上 | 是 | 支持 | ROS2 环境下的默认 IK 系统 |
“支持冗余臂”:能不能处理自由度 > 任务要求的机器人。
比如:
- 末端只需要控制
+ 姿态(6 个变量) - 但机器人有 7 个关节(像 KUKA、Franka Panda)
这就叫冗余机器人,有无穷多个解。
支持冗余的求解器:
- 能找到一个合适的解(可能是最近的、最省力的)
- 有些还能“挑选”一个更优的解
“支持约束”:能不能考虑限制条件求解。
比如:
- 关节不能超过最大角度
- 不想靠近奇异点
- 要避障,或只允许某些方向
支持约束的求解器:
- 会在解的过程中自动避开这些“禁区”
- 适合真实机器人控制或避障任务
场景推荐:
| 需求场景 | 推荐求解器 |
|---|---|
| 工业机器人控制、实时响应 | IKFast、RoboDK |
| 任意结构机器人、教学/研究 | Robotics Toolbox (RTB)、Modern Robotics |
| 冗余机械臂、路径优化 | TRAC-IK、Pinocchio、Drake |
| 强约束任务(关节限制/避障) | IK_QP(RTB)、Drake |
| 强仿真 / 虚拟仿真 | PyBullet、CoppeliaSim、Unity Articulation |
下载代码 RTB 逆运动学示例,并与 robodk 仿真结果对比
注意:在机械臂正前面求解较容易,背面容易失败